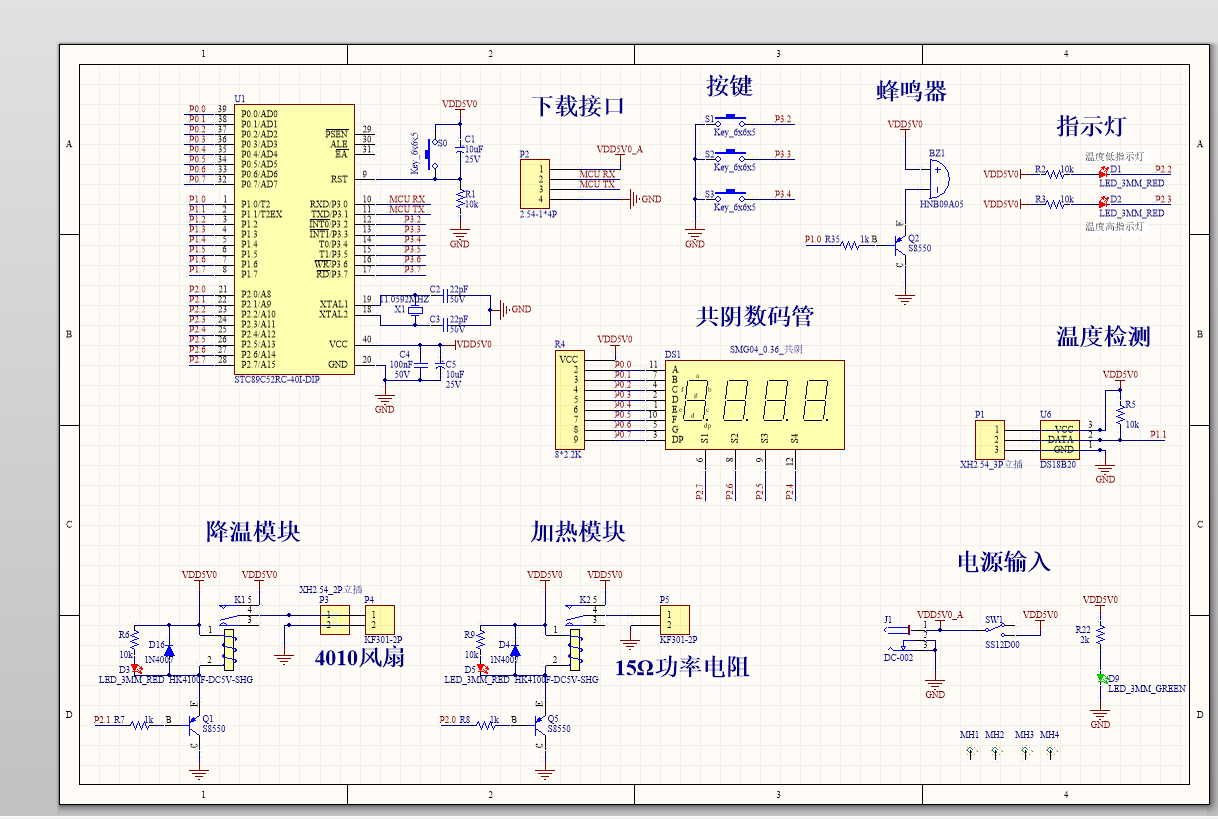
功能:
0.本系统采用STC89C52作为单片机
1.系统实时监测并显示当前温度,并通过四位数码管显示
2.超过设定阈值,蜂鸣器将报警,同时控制相应继电器实现降温或者加热
3.系统具备三个功能按键,可更改温度上限和下限
4.采用DC002作为电源接口可直接输入5V给整个系统供电
原理图:
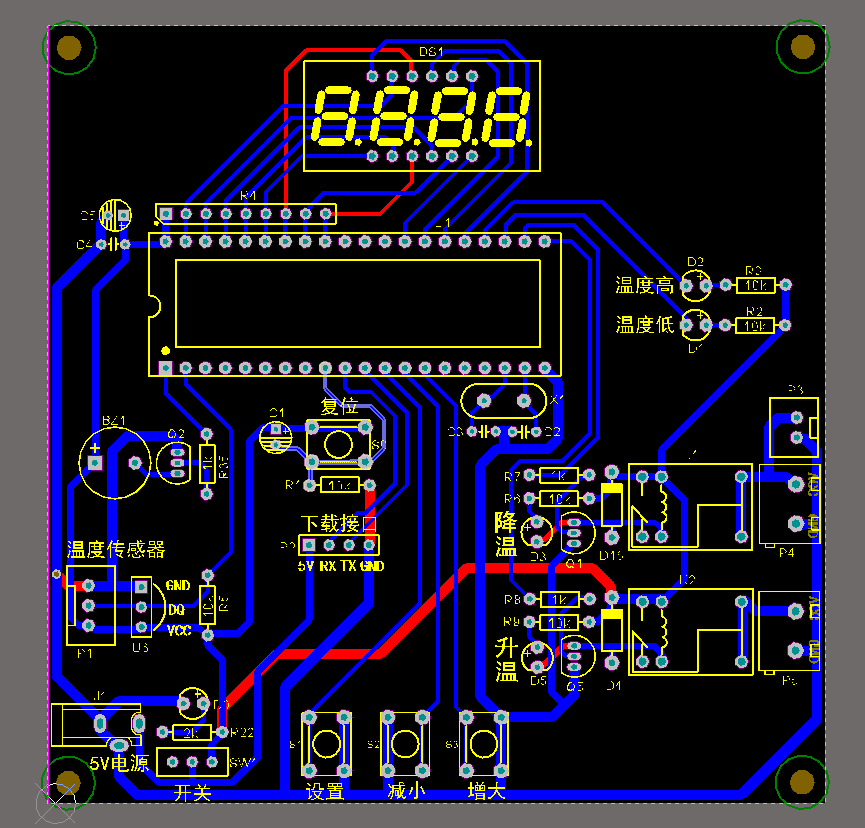
PCB :
主程序:
#include <reg52.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit DQ = P1^1;
sbit w1 = P2^4;
sbit w2 = P2^5;
sbit w3 = P2^6;
sbit w4 = P2^7;
sbit Buzzer = P1^0;
sbit JdqLow = P2^0;
sbit JdqHig = P2^1;
sbit LedLow = P2^2;
sbit LedHig = P2^3;
sbit KeySet = P3^2;
sbit KeyDown = P3^3;
sbit KeyUp = P3^4;
uchar code Array1[]={ 0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40 };
uchar code Array2[]={ 0xBf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef };
uchar Buff[4];
uchar ShowID=1;
int AlarmLow=150;
int AlarmHig=300;
void DelayMs(uint time)
{
uint i,j;
for(i=0;i<time;i++)
for(j=0;j<112;j++);
}
void Delay15us(void)
{
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
}
void DS18B20_ReSet(void)
{
uchar i;
DQ=0;
i=240;
while(--i);
DQ=1;
i=30;
while(--i);
while(~DQ);
i=4;
while(--i);
}
void DS18B20_WriteByte(uchar dat)
{
uchar j;
uchar btmp;
for(j=0;j<8;j++)
{
btmp=0x01;
btmp=btmp<<j;
btmp=btmp&dat;
if(btmp>0)
{
DQ=0;
Delay15us();
DQ=1;
Delay15us();
Delay15us();
Delay15us();
Delay15us();
}
else
{
DQ=0;
Delay15us();
Delay15us();
Delay15us();
Delay15us();
DQ=1;
Delay15us();
}
}
}
int DS18B20_ReadTemp(void)
{
uchar j;
int b,temp=0;
DS18B20_ReSet();
DS18B20_WriteByte(0xcc);
DS18B20_WriteByte(0x44);
DS18B20_ReSet();
DS18B20_WriteByte(0xcc);
DS18B20_WriteByte(0xbe);
for(j=0;j<16;j++)
{
DQ=0;
_nop_();
_nop_();
DQ=1;
Delay15us();
b=DQ;
Delay15us();
Delay15us();
Delay15us();
b=b<<j;
temp=temp|b;
}
temp=temp*0.0625*10;
return (temp);
}
void TimerInit()
{
TMOD = 0x01;
TH0 = 248;
TL0 = 48;
ET0 = 1;
EA = 1;
TR0 = 1;
}
void ShowTemp(int dat)
{
if(dat<0)
{
Buff[0]=Array1[10];
dat=0-dat;
}
else
{
Buff[0]=Array1[dat/1000];
}
Buff[1]=Array1[dat%1000/100];
Buff[2]=Array2[dat%100/10];
Buff[3]=Array1[dat%10];
}
void AlarmJudge(int dat)
{
if(dat<AlarmLow)
{
LedLow=0;
LedHig=1;
JdqLow=0;
JdqHig=1;
Buzzer=0;
}
else if(dat>AlarmHig)
{
LedLow=1;
LedHig=0;
JdqLow=1;
JdqHig=0;
Buzzer=0;
}
else
{
LedLow=1;
LedHig=1;
JdqLow=1;
JdqHig=1;
Buzzer=1;
}
}
void KeyScanf()
{
if(KeySet==0)
{
LedLow=0;
LedHig=1;
Buzzer=1;
ShowTemp(AlarmLow);
DelayMs(10);
while(!KeySet);
DelayMs(10);
while(1)
{
if(KeyDown==0)
{
if(AlarmLow>-550)
{
AlarmLow--;
ShowTemp(AlarmLow);
DelayMs(200);
}
}
if(KeyUp==0)
{
if(AlarmLow<1250)
{
AlarmLow++;
ShowTemp(AlarmLow);
DelayMs(200);
}
}
if(KeySet==0)
{
break;
}
}
LedLow=1;
LedHig=0;
ShowTemp(AlarmHig);
DelayMs(10);
while(!KeySet);
DelayMs(10);
while(1)
{
if(KeyDown==0)
{
if(AlarmHig>-550)
{
AlarmHig--;
ShowTemp(AlarmHig);
DelayMs(200);
}
}
if(KeyUp==0)
{
if(AlarmHig<1250)
{
AlarmHig++;
ShowTemp(AlarmHig);
DelayMs(200);
}
}
if(KeySet==0)
{
break;
}
}
LedLow=1;
LedHig=1;
DelayMs(10);
while(!KeySet);
DelayMs(10);
}
}
void main()
{
int temp;
uchar i;
TimerInit();
Buff[0]=Array1[0];
Buff[1]=Array1[0];
Buff[2]=Array1[0];
Buff[3]=Array1[0];
for(i=0;i<8;i++)
{
DS18B20_ReadTemp();
DelayMs(120);
}
while(1)
{
EA=0;
temp=DS18B20_ReadTemp();
EA=1;
ShowTemp(temp);
AlarmJudge(temp);
for(i=0;i<100;i++)
{
KeyScanf();
DelayMs(5);
}
}
}
void Timer0(void) interrupt 1
{
TH0 = 248;
TL0 = 48;
P0=0x00;
w1=1;
w2=1;
w3=1;
w4=1;
if(ShowID==1)
{
w1=0;
P0=Buff[0];
}
if(ShowID==2)
{
w2=0;
P0=Buff[1];
}
if(ShowID==3)
{
w3=0;
P0=Buff[2];
}
if(ShowID==4)
{
w4=0;
P0=Buff[3];
}
ShowID++;
if(ShowID==5)
ShowID=1;
}
仿真演示视频:
https://www.bilibili.com/video/BV1MG4y1p74C/
实物演示视频:
https://www.bilibili.com/video/BV1Cd4y1i7Ja/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)