一、I2c通讯协议
I2C通讯协议(Inter-Integrated Circuit)引脚少,硬件实现简单,可扩展性强,不需要USART、CAN等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
实现I2C需要两根信号线完成信息交换,SCL时钟信号线,SDA数据输入/输出线。它属于同步通信,由于输入输出数据均使用一根线,因此通信方向为半双工。
·I2C最少只需要两根线,和异步串口类似,但可以支持多个slave设备。一个I2C理论上最多可挂载127个设备,但除去保留地址,最多可挂载112个设备。
·和SPI不同的是,I2C可以支持multi-master系统,允许有多个master并且每个master都可以与所有的slaves通信(master之间不可通过I2C通信,并且每个master只能轮流使用I2C总线)。
·I2C的数据传输速率位于串口和SPI之间,大部分I2C设备支持100KHz和400KHz模式。
使用I2C传输数据会有一些额外消耗:每发送8bits数据,就需要额外1bit的元数据(ACK或NACK)。
·I2C支持双向数据交换,由于仅有一根数据线,故通信是半双工的。硬件复杂度也位于串口和SPI之间,而软件实现可以相当简单。
I2C物理层
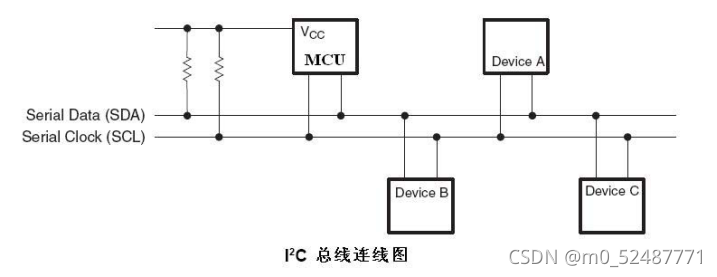
·它是一个支持设备的总线。“总线”指多个设备共用的信号线。在一个I2C通讯总线中,可连接多个I2C通讯设备,支持多个通讯主机及多个通讯从机。
·一个I2C总线只使用两条总线线路,一条双向串行数据线(SDA),一条串行时钟线(SCL)。数据线即用来表示数据,时钟线用于数据收发同步。
·每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问。
·总线通过上拉电阻接到电源。当I2C设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态时,由上拉电阻把总线拉成高电平。
·多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
·具有三种传输模式:标准模式传输速率为100kbit/s,快速模式为400kbit/s,高速模下可达3.4Mbit/s,但目前大多I2C设备尚不支持高速模式。
I2C协议层
以主机向从机写数据为例,其基本结构如图所示,依次为:
起始信号——从机地址——读写信号——数据位——应答位——… … ——停止位
起始信号(S):当 SCL 线是高电平时,SDA 线从高电平向低电平切换;停止信号§:当 SCL 是高电平时,SDA 线由低电平向高电平切换。
帧地址:I2C总线上的每个设备都有自己的独立地址,主机发起通讯时,通过SDA信号线发送设备地址(SLAVE_ADDRESS)来查找从机。I2C协议规定设备地址可以是7位或10位,实际中7位的地址应用比较广泛。
I2C使用SDA信号线来传输数据,使用SCL信号线进行数据同步。SDA数据线在SCL的每个时钟周期传输一位数据。传输时,SCL为高电平的时候SDA表示的数据有效,即此时的SDA为高电平时表示数据“1”,为低电平时表示数据“0”。当SCL为低电平时,SDA的数据无效,一般在这个时候SDA进行电平切换,为下一次表示数据做好准备。
I2C的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。
作为数据接收端时,当设备(无论主从机)接收到I2C传输的一个字节数据或地址后,若希望对方继续发送数据,则需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。
I2C功能框图剖析

时钟控制逻辑:
SCL线的时钟信号,由I2C接口根据时钟控制寄存器(CCR)控制,控制的参数主要为时钟频率。配置I2C的CCR寄存器可修改通讯速率相关的参数。
可选择I2C通讯的“标准/快速”模式,这两个模式分别I2C对应100/400Kbit/s的通讯速率。
在快速模式下可选择SCL时钟的占空比,可选Tlow/Thigh=2或Tlow/Thigh=16/9模式,我们知道I2C协议在SCL高电平时对SDA信号采样,SCL低电平时SDA准备下一个数据,修改SCL 的高低电平比会影响数据采样,但其实这两个模式的比例差别并不大,若不是要求非常严格,随便选就可以了。
CCR寄存器中还有一个12位的配置因子CCR,它与I2C外设的输入时钟源共同作用,产生SCL时钟,STM32的I2C外设都挂载在APB1总线上,使用APB1的时钟源PCLK1,SCL信号线的输出时钟公式如下:
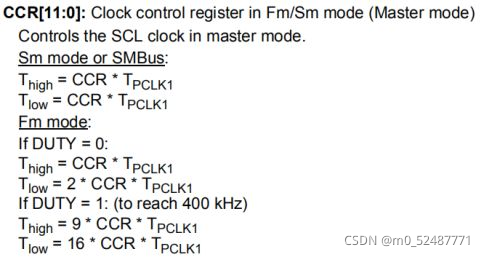
例如,我们的PCLK1=36MHz,想要配置400Kbit/s的速率,计算方式如下:
PCLK时钟周期:TPCLK1 = 1/36000000
目标SCL时钟周期:TSCL = 1/400000
SCL时钟周期内的高电平时间:THIGH = TSCL/3
SCL时钟周期内的低电平时间:TLOW = 2*TSCL/3
计算CCR的值:CCR = THIGH/TPCLK1 = 30
计算结果得出CCR为30,向该寄存器位写入此值则可以控制IIC的通讯速率为400KHz,其实即使配置出来的SCL时钟不完全等于标准的400KHz,IIC通讯的正确性也不会受到影响,因为所有数据通讯都是由SCL协调的,只要它的时钟频率不远高于标准即可。
数据控制逻辑:
I2C的SDA信号主要连到数据移位寄存器上,数据移位寄存器的数据来源及目标是数据寄存器(DR)、地址寄存器(OAR)、PEC寄存器以及SDA数据线。当向外发送数据的时候,数据移位寄存器以“数据寄存器”为数据源,把数据一位一位地通过SDA信号线发送出去;当从外部接收数据的时候,数据移位寄存器把SDA信号线采样到的数据一位位地存储到“数据寄存器”中。若使能了数据校验,接收到的数据会经过PCE计算器运算,运算结果存储在“PEC 寄存器”中。当STM32的I2C工作在从机模式的时候,接收到设备地址信号时,数据移位寄存器会把接收到的地址与STM32的自身的“I2C地址寄存器”的值作比较,以便响应主机的寻址。STM32的自身I2C地址可通过修改“自身地址寄存器”修改,支持同时使用两个I2C设备地址,两个地址分别存储在OAR1和OAR2中。
整体控制逻辑:
整体控制逻辑负责协调整个I2C外设,控制逻辑的工作模式根据我们配置的“控制寄存器(CR1/CR2)”的参数而改变。在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器(SR1和SR2)”,我们只要读取这些寄存器相关的寄存器位,就可以了解I2C的工作状态。除此之外,控制逻辑还根据要求,负责控制产生I2C中断信号、DMA请求及各种I2C的通讯信号(起始、停止、响应信号等)。
通讯过程
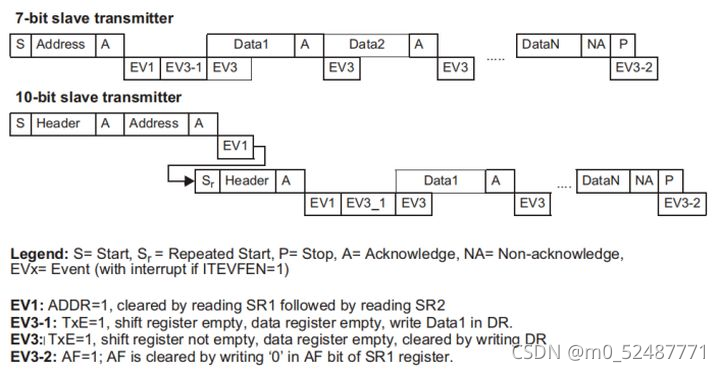
使用I2C外设通讯时,在通讯的不同阶段它会对“状态寄存器(SR1及SR2)”的不同数据位写入参数,我们通过读取这些寄存器标志来了解通讯状态。
从发送模式:
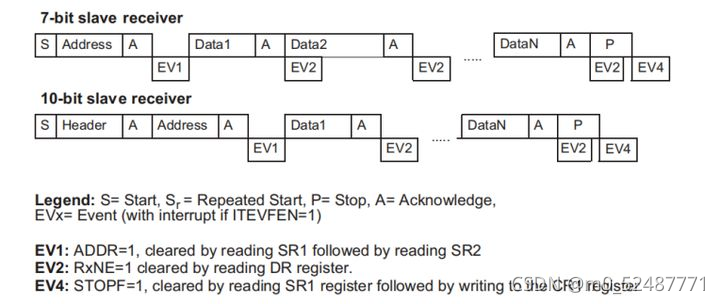
从接收模式:
之后会基于STM32和LM75A传感器(I2C)继续介绍怎样配置和使用I2C,包括使用I2C写入和读取数据。
二、实现AHT20采集程序
在野火提供的示例代码中,打开一个只包含固件库的空项目。向工程中添加相关代码,添加代码的具体内容请参考下面链接:
https://blog.csdn.net/hhhhhh277523/article/details/111397514
主要代码分析
void read_AHT20_once(void)
{
delay_ms(10);
reset_AHT20();
delay_ms(10);
init_AHT20();
delay_ms(10);
startMeasure_AHT20();
delay_ms(80);
read_AHT20();
delay_ms(5);
}
2.AHT20芯片读取数据
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
I2C_Stop();
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("读取失败!!!");
}
printf("\r\n");
printf("温度:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("湿度:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
}

三、温湿度采集——OLED显示
下载链接:https://github.com/Sunlight-Dazzling/stm32_AHT20_OLED/tree/main/User/usart,这里有完整的项目代码
,将勾选的文件添加到项目中

bsp_i2c.c中添加以下代码
#include "bsp_i2c.h"
#include "delay.h"
uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;
uint32_t H1=0;
uint32_t T1=0;
uint8_t t1,t2,t3,t4;
uint8_t h1,h2,h3;
uint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};
char strTemp[30];
char strHumi[30];
int t;
int h;
float a;
float b;
void read_AHT20(void)
{
uint8_t i;
for(i=0; i<6; i++)
{
readByte[i]=0;
}
I2C_Start();
I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();
readByte[1]= I2C_ReadByte();
Send_ACK();
readByte[2]= I2C_ReadByte();
Send_ACK();
readByte[3]= I2C_ReadByte();
Send_ACK();
readByte[4]= I2C_ReadByte();
Send_ACK();
readByte[5]= I2C_ReadByte();
SendNot_Ack();
I2C_Stop();
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;
H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];
T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;
AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;
AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("lyy");
}
t=T1/10;
t1=T1%10;
a=(float)(t+t1*0.1);
h=H1/10;
h1=H1%10;
b=(float)(h+h1*0.1);
sprintf(strTemp,"%.1f",a);
sprintf(strHumi,"%.1f",b);
GUI_ShowCHinese(16,00,16,"温湿度显示",1);
GUI_ShowCHinese(16,20,16,"温度",1);
GUI_ShowString(53,20,strTemp,16,1);
GUI_ShowCHinese(16,38,16,"湿度",1);
GUI_ShowString(53,38,strHumi,16,1);
delay_ms(1500);
delay_ms(1500);
}
在gui.c中的oledfont.h添加相应的点阵字库,需要找到温湿度显示五个字对应的字模
main函数添加一下代码
int main(void)
{
delay_init();
uart_init(115200);
IIC_Init();
NVIC_Configuration();
OLED_Init();
OLED_Clear(0);
while(1)
{
read_AHT20_once();
OLED_Clear(0);
delay_ms(1500);
}
}
运行结果
四、OLED滑动显示长字符
水平左右移动得代码,将其添加到main函数中
OLED_WR_Byte(0x2E,OLED_CMD);
OLED_WR_Byte(0x26,OLED_CMD);
OLED_WR_Byte(0x00,OLED_CMD);
OLED_WR_Byte(0x00,OLED_CMD);
OLED_WR_Byte(0x07,OLED_CMD);
OLED_WR_Byte(0x07,OLED_CMD);
OLED_WR_Byte(0x00,OLED_CMD);
OLED_WR_Byte(0xFF,OLED_CMD);
OLED_WR_Byte(0x2F,OLED_CMD);
对重庆交通大学六个字进行字模转换
重(0) 庆(1) 交(2) 通(3) 大(4) 学(5)
{0x00,0x10,0x00,0xF8,0x3F,0x00,0x01,0x00,0xFF,0xFE,0x01,0x00,0x1F,0xF0,0x11,0x10},
{0x1F,0xF0,0x11,0x10,0x1F,0xF0,0x01,0x00,0x3F,0xF8,0x01,0x00,0xFF,0xFE,0x00,0x00},/“重”,0/
{0x01,0x00,0x00,0x80,0x3F,0xFE,0x20,0x00,0x20,0x80,0x20,0x80,0x20,0x80,0x2F,0xFC},
{0x20,0x80,0x21,0x40,0x21,0x40,0x22,0x20,0x42,0x20,0x44,0x10,0x88,0x08,0x10,0x06},/“庆”,1/
{0x02,0x00,0x01,0x00,0x01,0x00,0xFF,0xFE,0x00,0x00,0x10,0x10,0x10,0x08,0x20,0x24},
{0x48,0x24,0x04,0x40,0x02,0x80,0x01,0x00,0x02,0x80,0x0C,0x40,0x30,0x30,0xC0,0x0E},/“交”,2/
{0x00,0x00,0x47,0xF8,0x20,0x10,0x21,0xA0,0x00,0x40,0x07,0xFC,0xE4,0x44,0x24,0x44},
{0x27,0xFC,0x24,0x44,0x24,0x44,0x27,0xFC,0x24,0x44,0x24,0x54,0x54,0x08,0x8F,0xFE},/“通”,3/
{0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0xFF,0xFE,0x01,0x00,0x01,0x00},
{0x02,0x80,0x02,0x80,0x04,0x40,0x04,0x40,0x08,0x20,0x10,0x10,0x20,0x08,0xC0,0x06},/“大”,4/
{0x22,0x08,0x11,0x08,0x11,0x10,0x00,0x20,0x7F,0xFE,0x40,0x02,0x80,0x04,0x1F,0xE0},
{0x00,0x40,0x01,0x80,0xFF,0xFE,0x01,0x00,0x01,0x00,0x01,0x00,0x05,0x00,0x02,0x00},/“学”,5/
在test.c添加代码
void TEST_MainPage(void)
{
GUI_ShowCHinese(10,20,16,"重庆交通大学",1);
delay_ms(1500);
delay_ms(1500);
}
结果
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)