#include "myiic.h"
#include "delay.h"
//初始化IIC
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//RCC->APB2ENR|=1<<4;//先使能外设IO PORTC时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); //sda线输出
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();//sda线输出
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDA设置为输入
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
void IIC_WriteBytes(u8 WriteAddr,u8* data,u8 dataLength)
{
u8 i;
IIC_Start();
IIC_Send_Byte(WriteAddr); //发送写命令
IIC_Wait_Ack();
for(i=0;i<dataLength;i++)
{
IIC_Send_Byte(data[i]);
IIC_Wait_Ack();
}
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
void IIC_ReadBytes(u8 deviceAddr, u8 writeAddr,u8* data,u8 dataLength)
{
u8 i;
IIC_Start();
IIC_Send_Byte(deviceAddr); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(writeAddr);
IIC_Wait_Ack();
IIC_Send_Byte(deviceAddr|0X01);//进入接收模式
IIC_Wait_Ack();
for(i=0;i<dataLength-1;i++)
{
data[i] = IIC_Read_Byte(1);
}
data[dataLength-1] = IIC_Read_Byte(0);
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
void IIC_Read_One_Byte(u8 daddr,u8 addr,u8* data)
{
IIC_Start(); //1
IIC_Send_Byte(daddr); //发送写命令 2
IIC_Wait_Ack();//3
IIC_Send_Byte(addr);//发送地址 4
IIC_Wait_Ack(); //5
IIC_Start(); //6
IIC_Send_Byte(daddr|0X01);//进入接收模式 7
IIC_Wait_Ack(); // 8
*data = IIC_Read_Byte(0); //9 10
IIC_Stop();//产生一个停止条件 //11
}
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data)
{
IIC_Start(); //1
IIC_Send_Byte(daddr); //发送写命令 2
IIC_Wait_Ack();//3
IIC_Send_Byte(addr);//发送地址 4
IIC_Wait_Ack(); //5
IIC_Send_Byte(data); //发送字节 6
IIC_Wait_Ack(); //7
IIC_Stop();//产生一个停止条件 8
delay_ms(10);
}
#include "max30102.h"
#include "myiic.h"
#include "delay.h"
//void IIC_Read_One_Byte(u8 daddr,u8 addr,u8* data)
//void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data)
/*
上面两个函数和下面两个函数功能是一样
*/
u8 max30102_Bus_Write(u8 Register_Address, u8 Word_Data)
{
/* 采用串行EEPROM随即读取指令序列,连续读取若干字节 */
/* 第1步:发起I2C总线启动信号 */
IIC_Start();//1
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 *///2
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)//3
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址 */
IIC_Send_Byte(Register_Address);//4
if (IIC_Wait_Ack() != 0)//5
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第5步:开始写入数据 */
IIC_Send_Byte(Word_Data);//6
/* 第6步:发送ACK */
if (IIC_Wait_Ack() != 0)//7
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 发送I2C总线停止信号 */
IIC_Stop();//8
return 1; /* 执行成功 */
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
return 0;
}
u8 max30102_Bus_Read(u8 Register_Address)
{
u8 data;
/* 第1步:发起I2C总线启动信号 */
IIC_Start();//1
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 *///2
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)//3
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址, */
IIC_Send_Byte((uint8_t)Register_Address);//4
if (IIC_Wait_Ack() != 0)//5
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。下面开始读取数据 */
IIC_Start();//6
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_RD); /* 此处是读指令 *///7
/* 第8步:发送ACK */
if (IIC_Wait_Ack() != 0)//8
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:读取数据 */
{
data = IIC_Read_Byte(0); /* 读1个字节 *///9 10
IIC_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) *///这里可以不要吗
}
/* 发送I2C总线停止信号 */
IIC_Stop();//11
return data; /* 执行成功 返回data值 */
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
return 0;
}
//这个没用上
void max30102_FIFO_ReadWords(u8 Register_Address,u16 Word_Data[][2],u8 count)
{
u8 i=0;
u8 no = count;
u8 data1, data2;
/* 第1步:发起I2C总线启动信号 */
IIC_Start();//1
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 *///2
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)//3
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址, */
IIC_Send_Byte((uint8_t)Register_Address);//4
if (IIC_Wait_Ack() != 0)//5
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。下面开始读取数据 */
IIC_Start();//6
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_RD); /* 此处是读指令 *///7
/* 第8步:发送ACK */
if (IIC_Wait_Ack() != 0)//8
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:读取数据 */
while (no)
{
data1 = IIC_Read_Byte(0); //9
IIC_Ack();// 10
data2 = IIC_Read_Byte(0);//11
IIC_Ack();//12
Word_Data[i][0] = (((u16)data1 << 8) | data2); //
data1 = IIC_Read_Byte(0); //13
IIC_Ack();//14
data2 = IIC_Read_Byte(0);//15
if(1==no)
IIC_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
else
IIC_Ack();
Word_Data[i][1] = (((u16)data1 << 8) | data2);
no--;
i++;
}
/* 发送I2C总线停止信号 */
IIC_Stop();
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
}
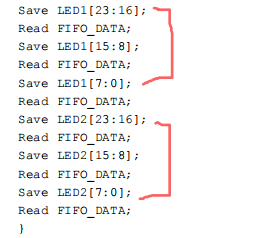
/*
用来读取FIFO的数据
总共六个字节前三属于RED
后三属于IR
*/
//这里读一个样品采样点
void max30102_FIFO_ReadBytes(u8 Register_Address,u8* Data)
{
max30102_Bus_Read(REG_INTR_STATUS_1);
max30102_Bus_Read(REG_INTR_STATUS_2);
/* 第1步:发起I2C总线启动信号 */
IIC_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_WR); /* 此处是写指令 */
/* 第3步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第4步:发送字节地址, */
IIC_Send_Byte((uint8_t)Register_Address);
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。下面开始读取数据 */
IIC_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
IIC_Send_Byte(max30102_WR_address | I2C_RD); /* 此处是读指令 */
/* 第8步:发送ACK */
if (IIC_Wait_Ack() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
/* 第9步:读取数据 */
Data[0] = IIC_Read_Byte(1);
Data[1] = IIC_Read_Byte(1);
Data[2] = IIC_Read_Byte(1);
Data[3] = IIC_Read_Byte(1);
Data[4] = IIC_Read_Byte(1);
Data[5] = IIC_Read_Byte(0);
/* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
/* 发送I2C总线停止信号 */
IIC_Stop();
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
IIC_Stop();
}
/*
初始化
*/
void max30102_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_Init();
max30102_reset();
max30102_Bus_Write(REG_INTR_ENABLE_1,0xc0); // INTR setting
max30102_Bus_Write(REG_INTR_ENABLE_2,0x00);
max30102_Bus_Write(REG_FIFO_WR_PTR,0x00); //FIFO_WR_PTR[4:0]
max30102_Bus_Write(REG_OVF_COUNTER,0x00); //OVF_COUNTER[4:0]
max30102_Bus_Write(REG_FIFO_RD_PTR,0x00); //FIFO_RD_PTR[4:0]
max30102_Bus_Write(REG_FIFO_CONFIG,0x0f); //sample avg = 1, fifo rollover=false, fifo almost full = 17
max30102_Bus_Write(REG_MODE_CONFIG,0x03); //0x02 for Red only, 0x03 for SpO2 mode 0x07 multimode LED
max30102_Bus_Write(REG_SPO2_CONFIG,0x27); // SPO2_ADC range = 4096nA, SPO2 sample rate (100 Hz), LED pulseWidth (400uS)
max30102_Bus_Write(REG_LED1_PA,0x24); //Choose value for ~ 7mA for LED1
max30102_Bus_Write(REG_LED2_PA,0x24); // Choose value for ~ 7mA for LED2
max30102_Bus_Write(REG_PILOT_PA,0x7f); // Choose value for ~ 25mA for Pilot LED
}
void max30102_reset(void)
{
max30102_Bus_Write(REG_MODE_CONFIG,0x40);
max30102_Bus_Write(REG_MODE_CONFIG,0x40);
}
void maxim_max30102_write_reg(uint8_t uch_addr, uint8_t uch_data)
{
IIC_Write_One_Byte(I2C_WRITE_ADDR,uch_addr,uch_data);
}
void maxim_max30102_read_reg(uint8_t uch_addr, uint8_t *puch_data)
{
IIC_Read_One_Byte(I2C_WRITE_ADDR,uch_addr,puch_data);
}
void maxim_max30102_read_fifo(uint32_t *pun_red_led, uint32_t *pun_ir_led)
{
uint32_t un_temp;
unsigned char uch_temp;
char ach_i2c_data[6];
*pun_red_led=0;
*pun_ir_led=0;
//read and clear status register
maxim_max30102_read_reg(REG_INTR_STATUS_1, &uch_temp);
maxim_max30102_read_reg(REG_INTR_STATUS_2, &uch_temp);
IIC_ReadBytes(I2C_WRITE_ADDR,REG_FIFO_DATA,(u8 *)ach_i2c_data,6);
un_temp=(unsigned char) ach_i2c_data[0];
un_temp<<=16;
*pun_red_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[1];
un_temp<<=8;
*pun_red_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[2];
*pun_red_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[3];
un_temp<<=16;
*pun_ir_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[4];
un_temp<<=8;
*pun_ir_led+=un_temp;
un_temp=(unsigned char) ach_i2c_data[5];
*pun_ir_led+=un_temp;
*pun_red_led&=0x03FFFF; //Mask MSB [23:18]
*pun_ir_led&=0x03FFFF; //Mask MSB [23:18]
}




本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)