文章目录
- 一、SG90舵机的引脚介绍
- 二、与pico引脚的对接
- 三、舵机的使用原理
- 四、Thonny程序
- 五、效果展示
一、SG90舵机的引脚介绍
舵机上会引出三根线:分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),就是地线、电源线(5V)和信号线。千万不能接错!
二、与pico引脚的对接
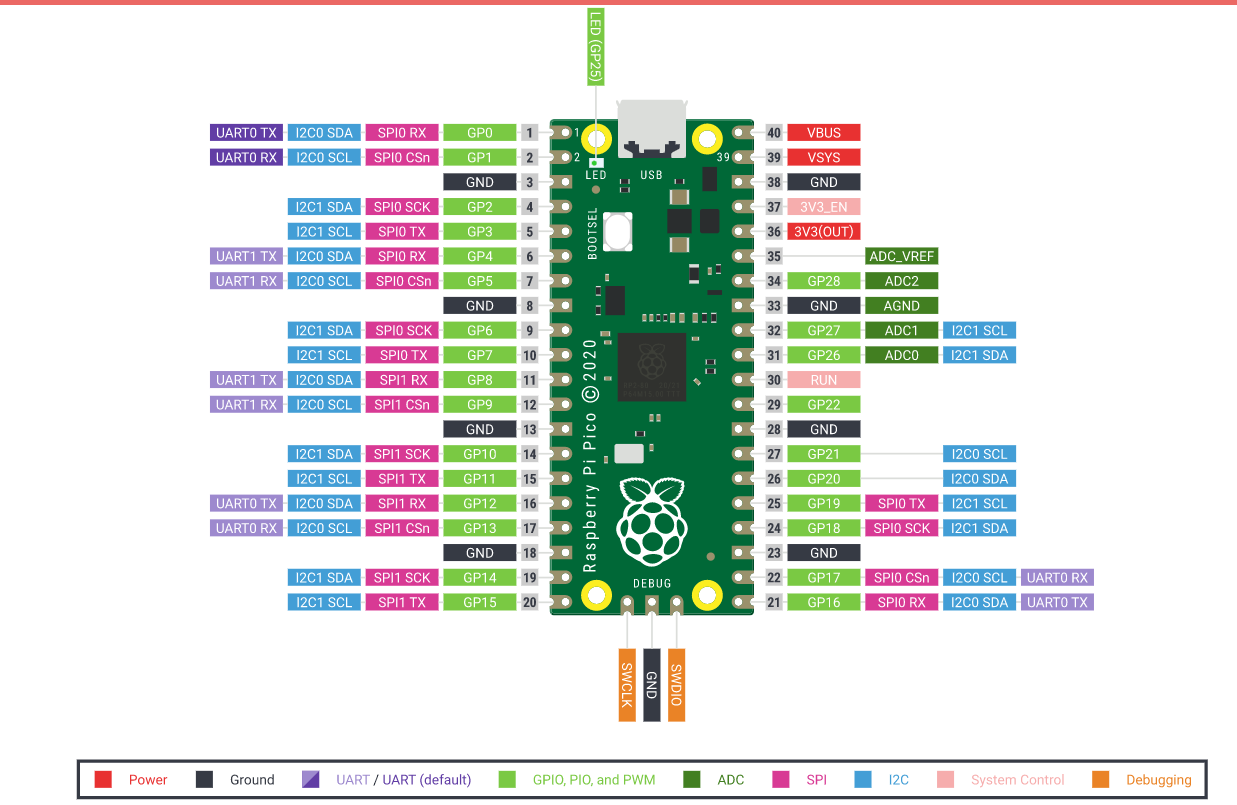
黄色(数据线) —>GPIO0
棕色(底线GND) —>GND
红色(电源线VCC) —>VBUS
三、舵机的使用原理
1638-8192(0-180)
sg90原理:在50hz频率下周期为20ms
t = 0.5ms——————-舵机会转
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)