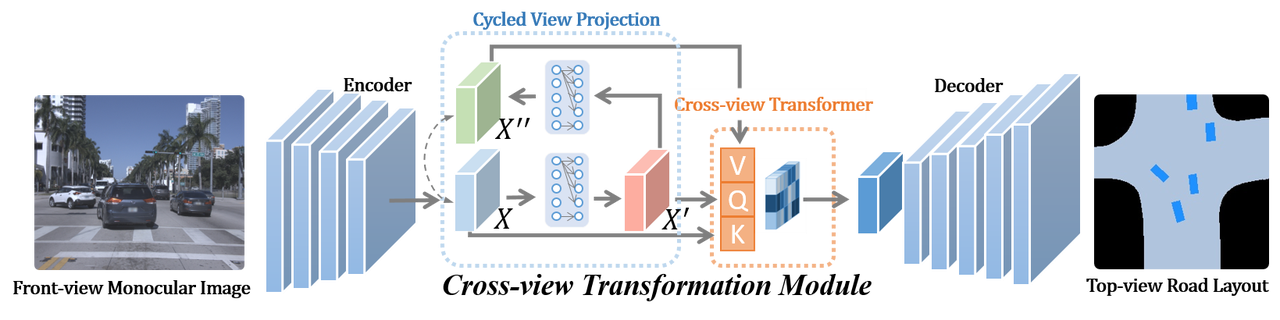
1. PYVA: Projecting Your View Attentively (CVPR 2021)
- 数据集:KITTI
- paper,github,35 FPS
- 输入:单张摄像头前向图
- 输出:road layout estimation and vehicle occupancy estimation
目标检测
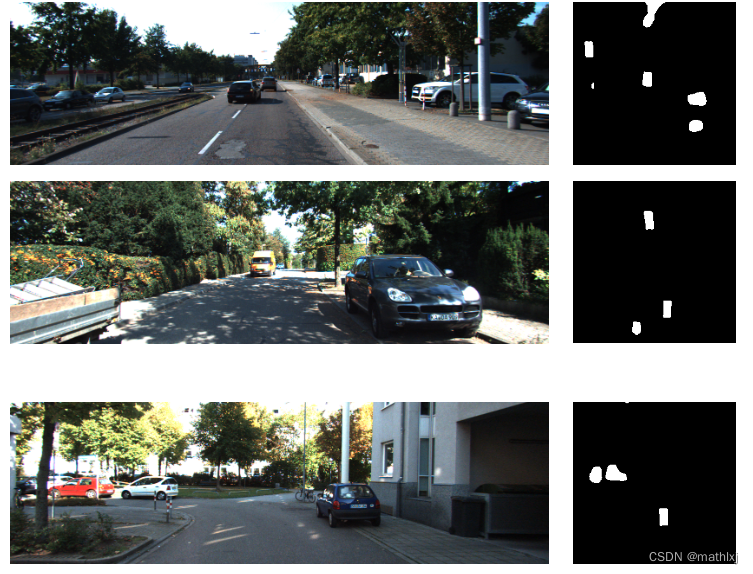
道路分割

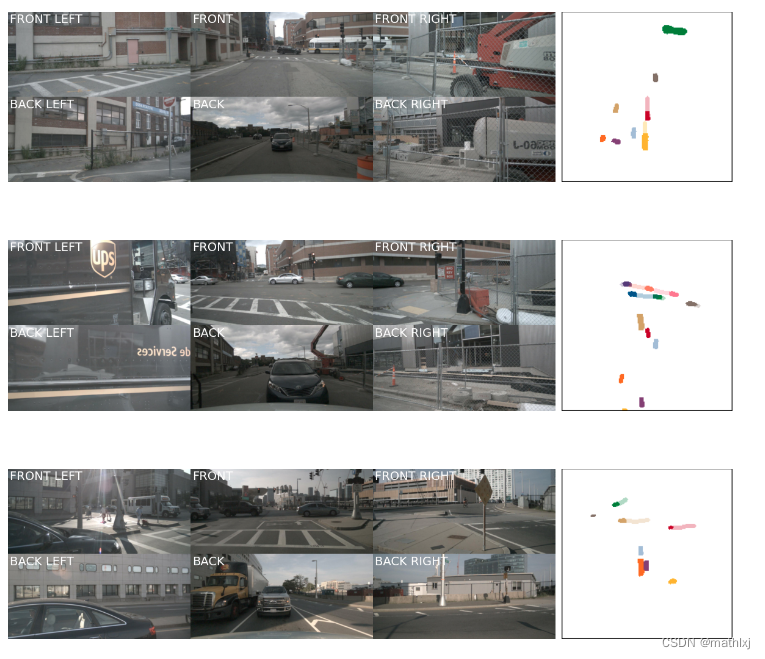
2. FIERY (ICCV 2021)
github
主页
数据集:NuScenes
输入:6个视角的相机图像+内参+外参
模型推断输出示意图:
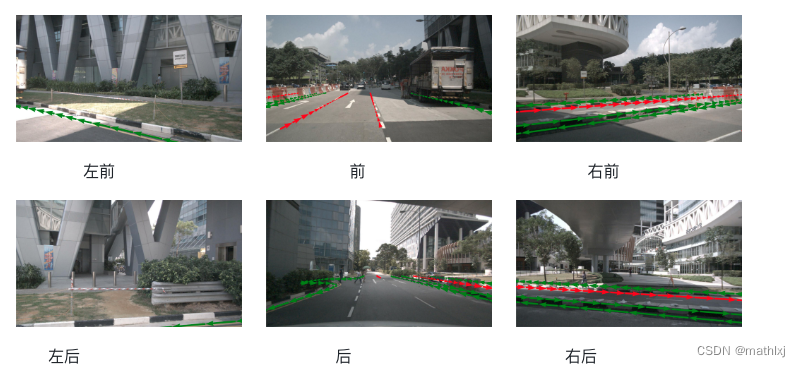
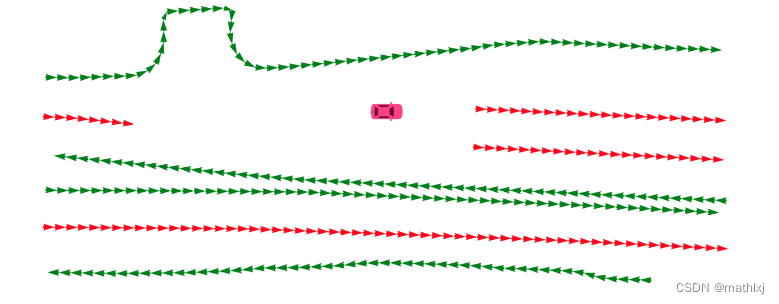
3. HDMapNET( ICRA 2022)
暂时没有预训练好的模型,但可以可视化其如何如何处理标注
- paper,github,主页,知乎
- 输入:多摄像头or/and 雷达
- 输出:HD语义地图分割
- 数据集:NuScenes
其处理结果如下:
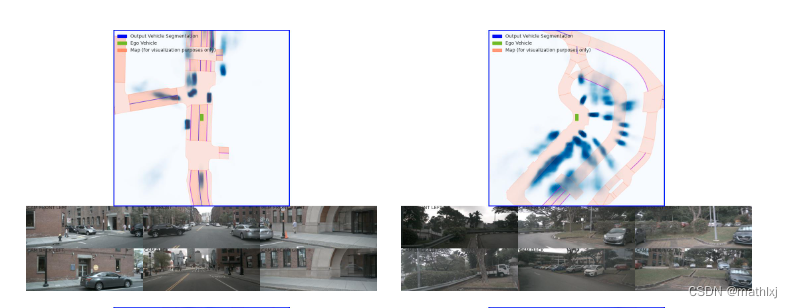
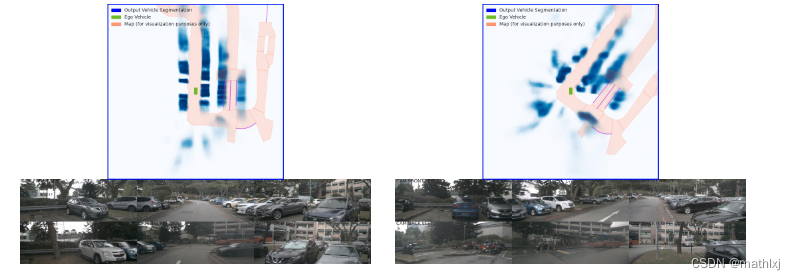
4. Lift, Splat, Shoot (ECCV 2020,NVIDIA)
- paper,github,主页, 35 hz on a Titan V
- 输入:6个摄像头
- 输出:语义分割,道路和交通参与者
- 数据集:NuScenes
模型推断结果的例子:
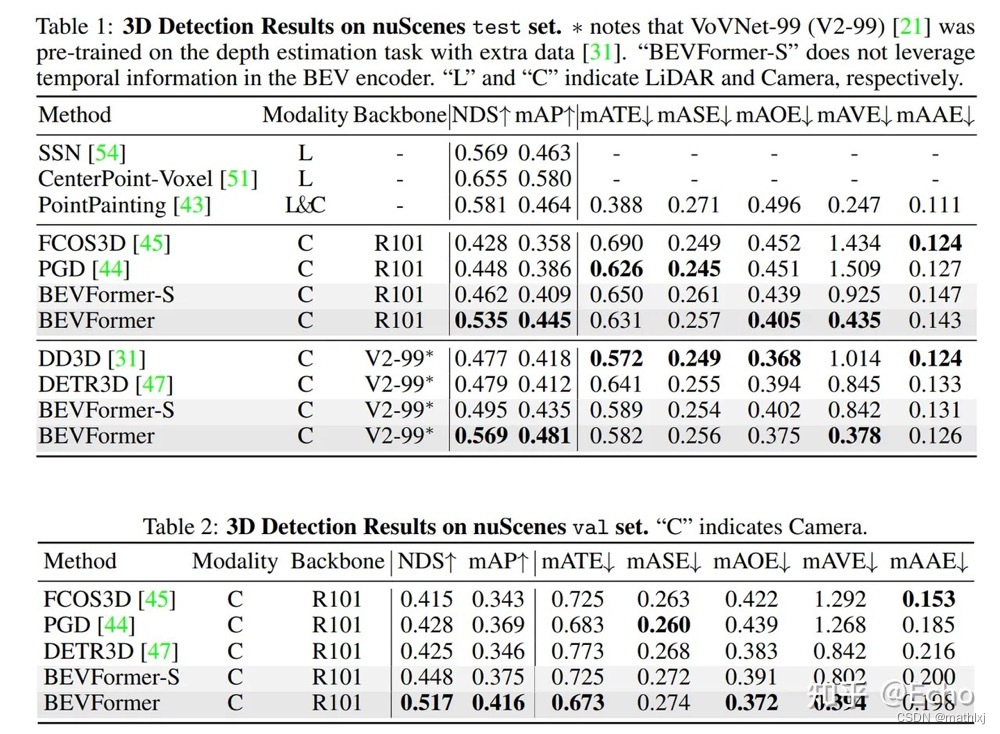
5. 一个比赛:nuScence 3D Camera-Only Detection
主页
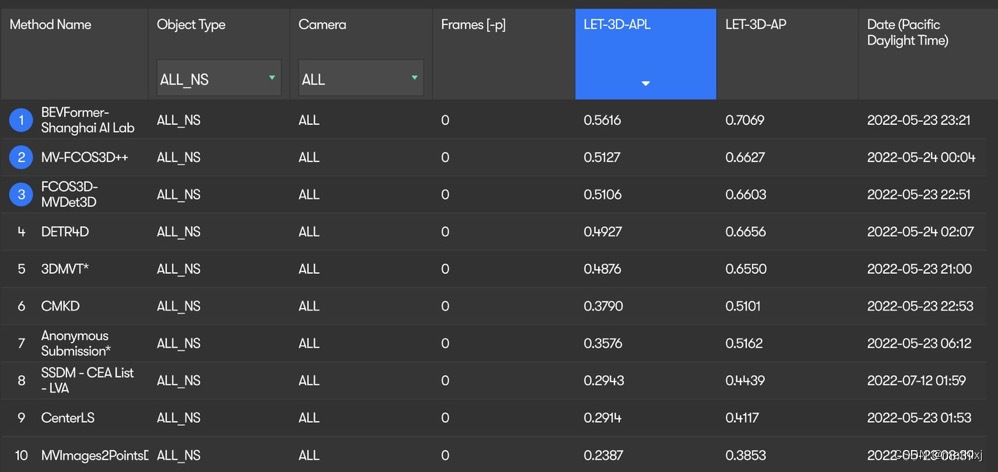
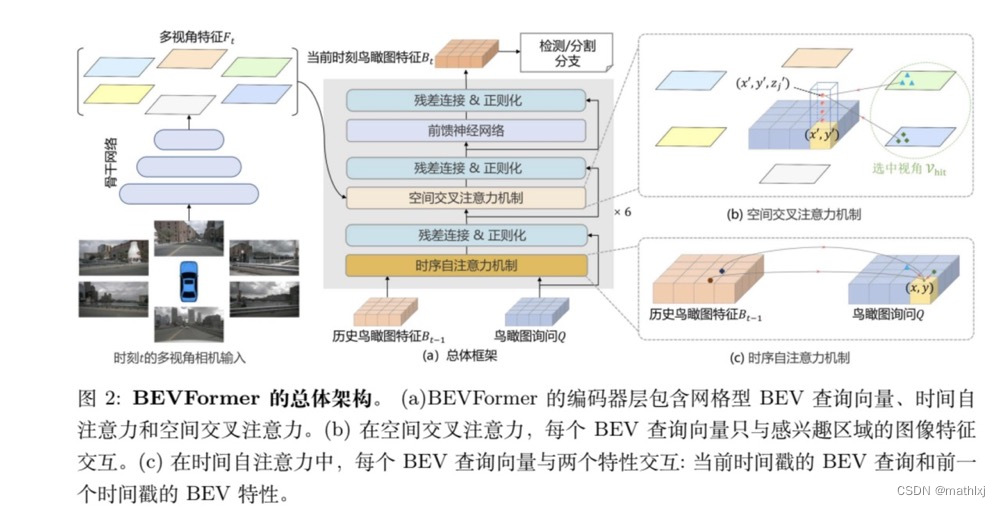
5.1 BEFormer: 基于Transformer的BEV编码器
BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers
5.2 其它名次的算法
- MV-FCOS3D++ 基于MMDetection3D,无具体的github代码
- FCOS3D-MVDet3D 基于MMDetection3D,无具体的github代码
- DETR4D :无任何描述
- DMVT*:无任何描述
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)