使用此方法可以快速得出PID参数而不用经过复杂的计算,电压电流环均可使用此方法
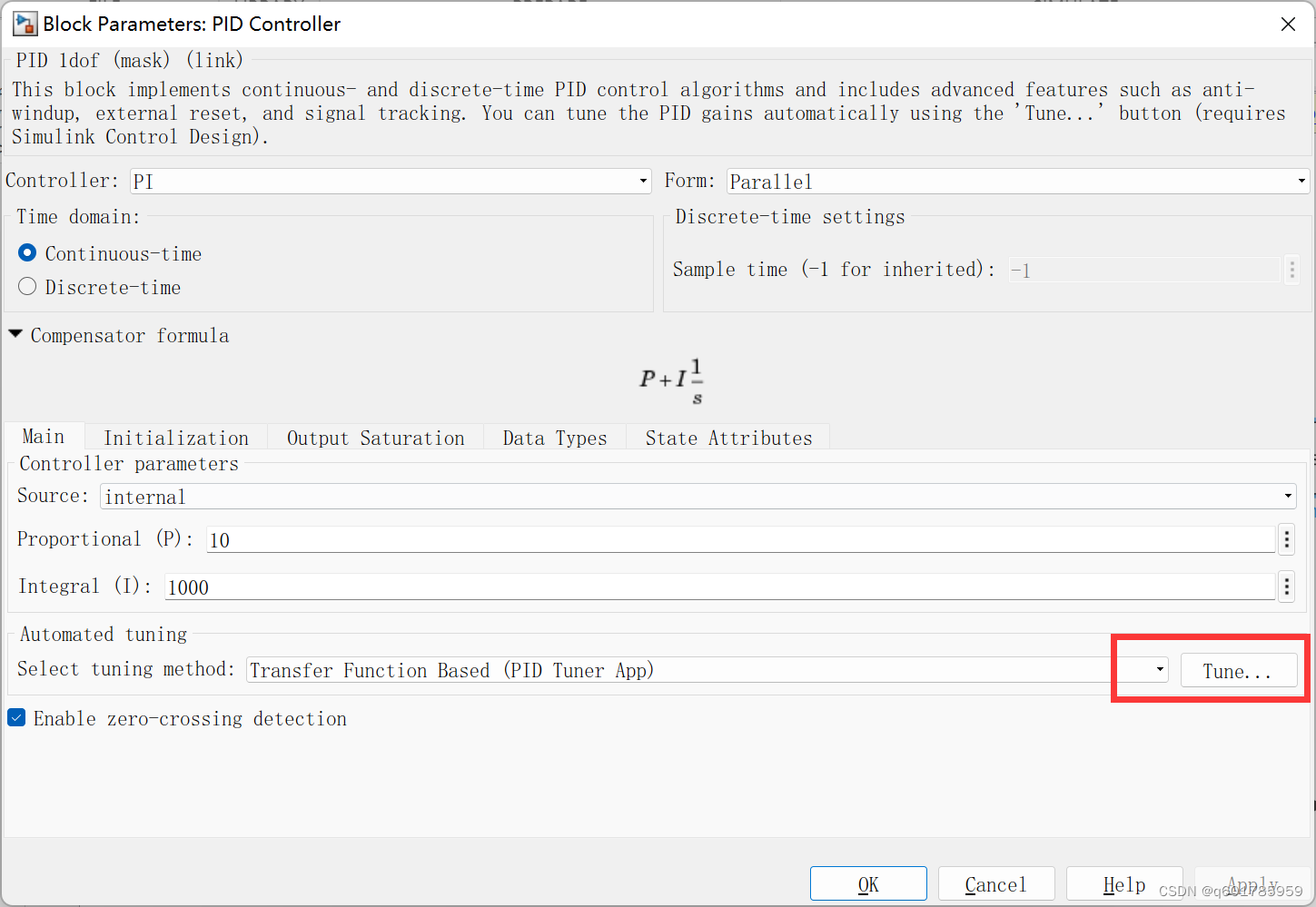
1.模型搭建完成后点击PID模块的Tunne 选项进入PID Tunner模块
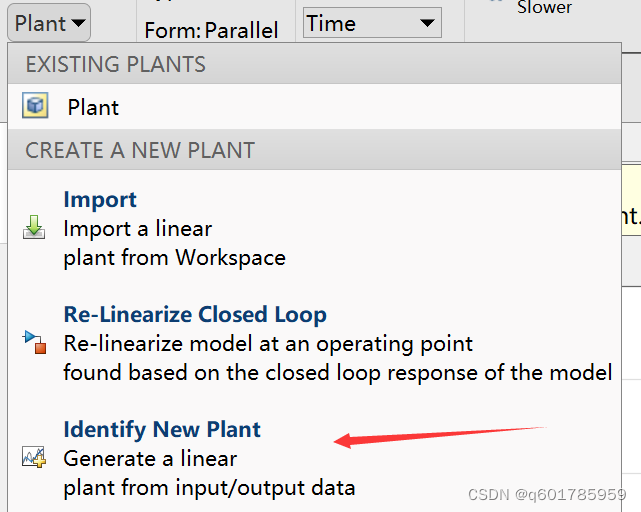
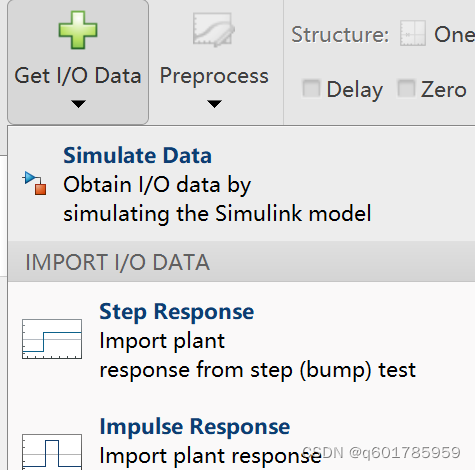
2.由于模型为非线性对象需要识别控制对象,点击 plant >Identify New Plant
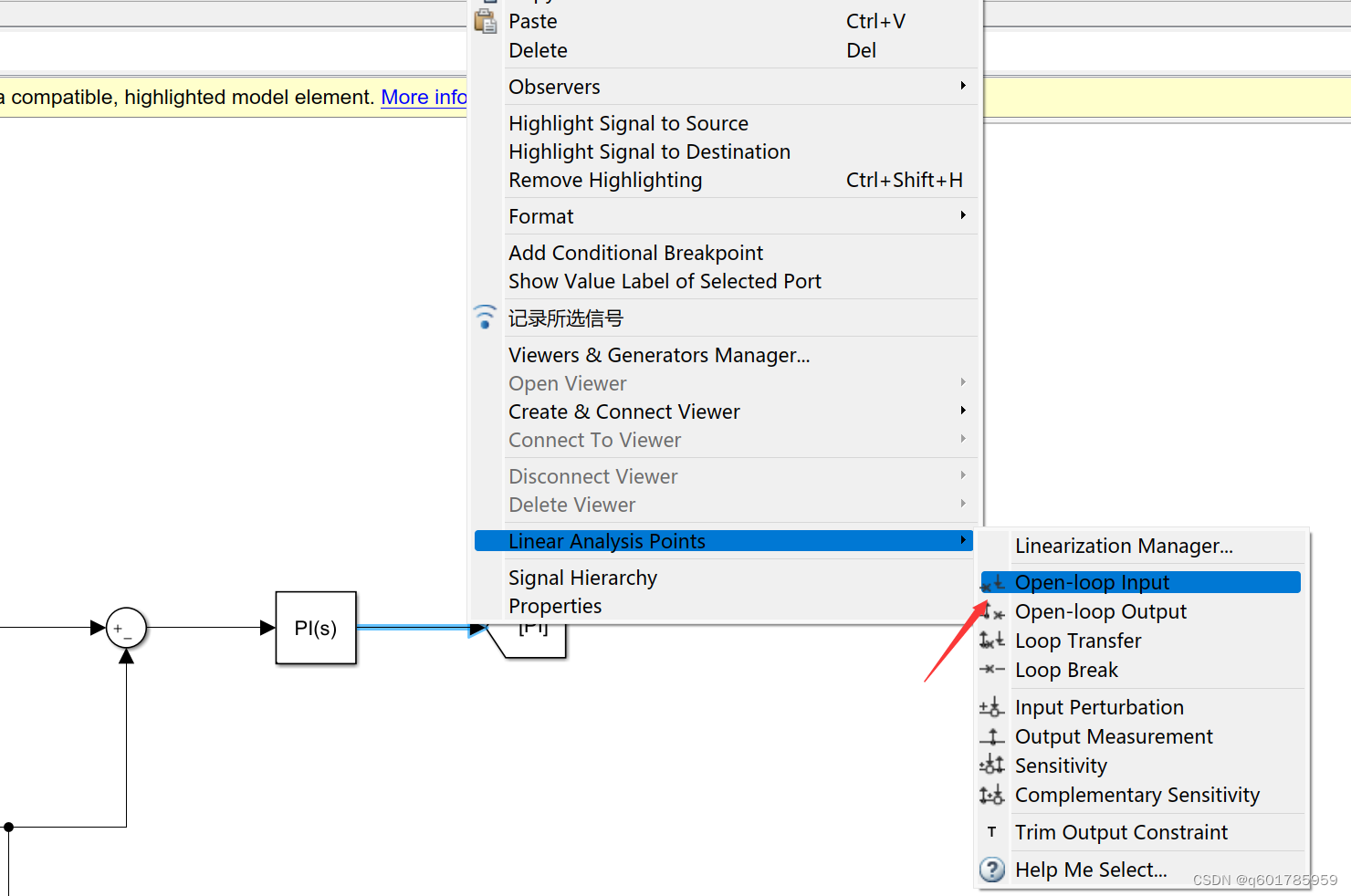
3.选择PI的输出量作为被控对象的输入量
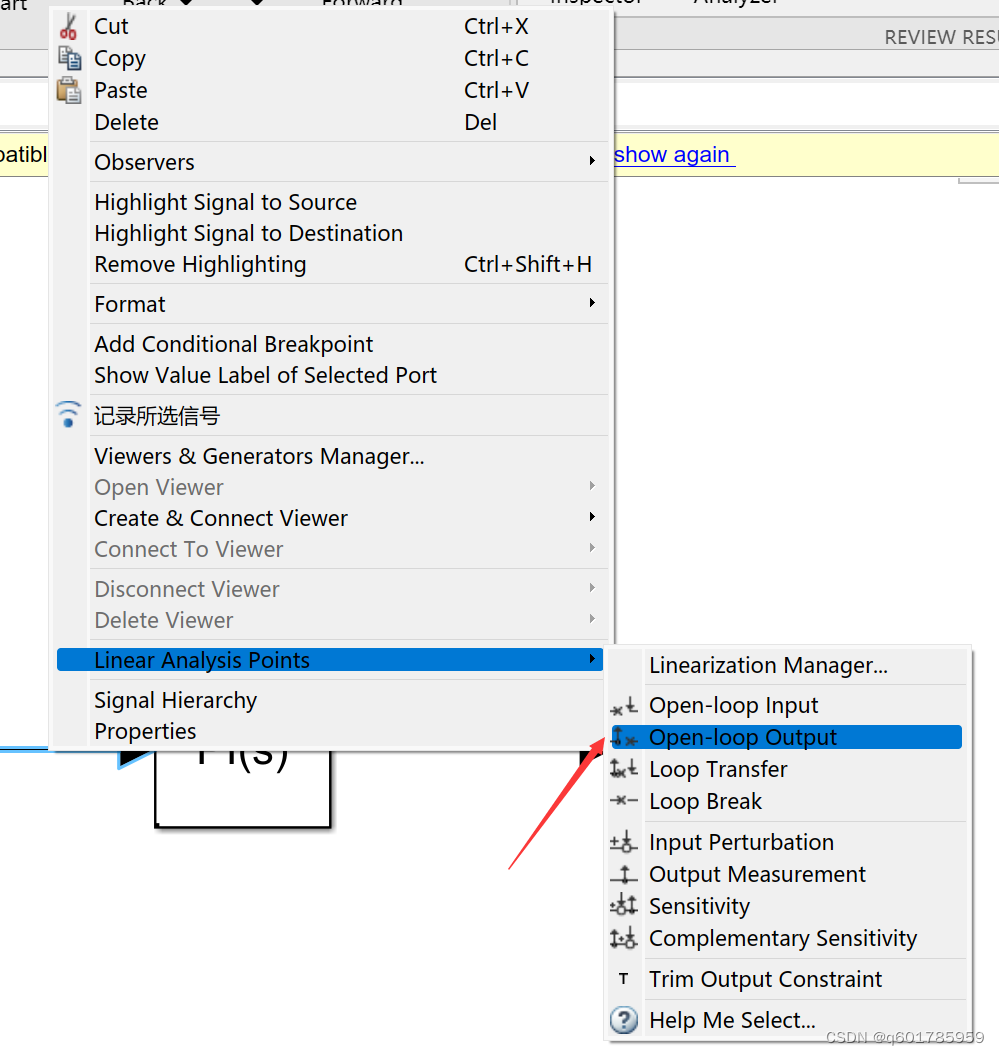
4.选择PI的输入量作为被控对象的输出量
5.选择Simulate Data并填写 Sample Time / offset / oneset lag / Stop Time
等参数,其中Sample Time为采样时间/offset为稳态下占空比数值 oneset lag为阶跃信号跳变时间
当系统稳定后系统通过此阶跃信号辨识系统的传递函数

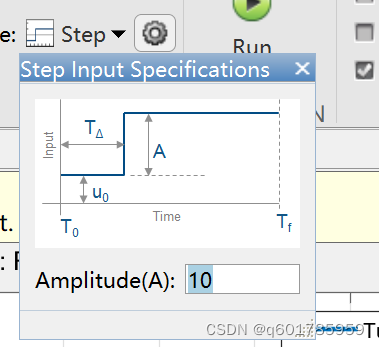
6.设置阶跃信号幅值为10
7.点击 Run运行进行模型辨识
8.当系统辨识完成后点击Apply 和Close应用辨识模型参数
9.选择模型的零极点类型,并拖动右侧蓝色图形尽量与识别出的波形一致,如不知道零极点类型,可以多选择多种类型,一一拖动图形尝试
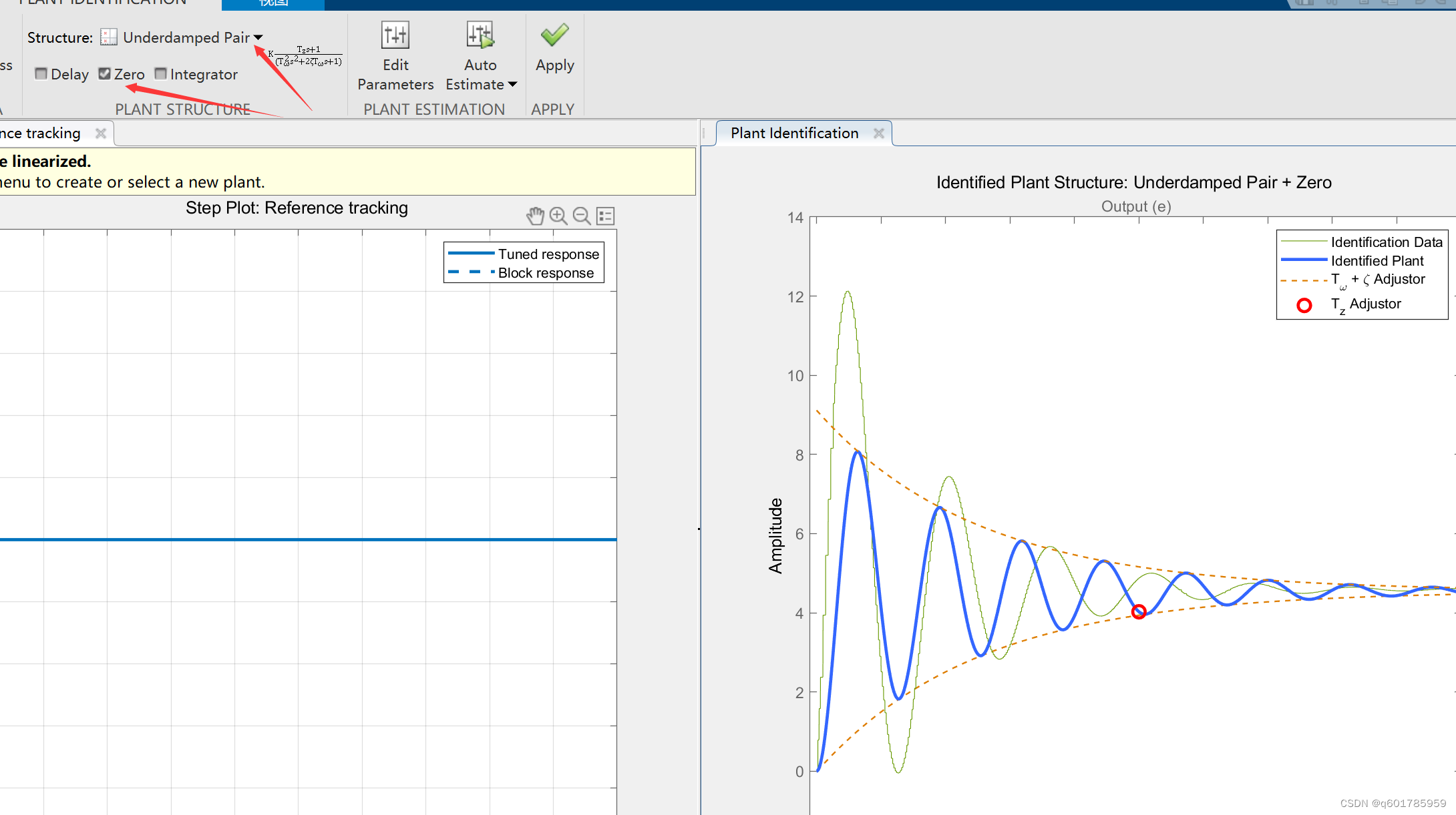
10.点击AutoEstimate自动辨识,完成后可以看到匹配度,再点击Apply
11.点击PID TUNNER 将Time改为频域Frequency
12.设置穿越频率,单位为rad/s 如设置为5KHz穿越频率, 2*π*5k ≈ 31416并填入设置处
13.设置相位裕量 如75°

14.点击Update Block 计算PI参数,然后点击Show Parameters 即可获取PI参数
15.将获取到的PI参数填入PI控制器即可实现控制效果
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)