最近在学强化学习,学长推荐用mujoco来做仿真环境。原本我是想照着教程安装的。结果最近mujoco被DeepMind收购了,现在是开源的,许多安装步骤都不太一样了,所以我就写了这篇安装教程。
安装环境:
python 3.7
mujoco 2.1.0(截止到2022/7/10号,目前gym好像不能适配2.1.0更高的版本,所以我现在只推荐安装mujoco的2.1.0的版本)
安装python、Microsoft Visual Studio
这些是前置环境的安装,我这不做过多赘述了,其他安装mujoco的教程也有这部分的内容。
安装mujoco
首先我们进到mujoco的github–https://github.com/deepmind/mujoco/releases去下载2.1.0的版本 。
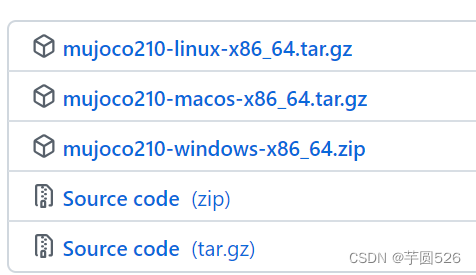
选择mujoco210-windows-x86_64.zip文件下载。
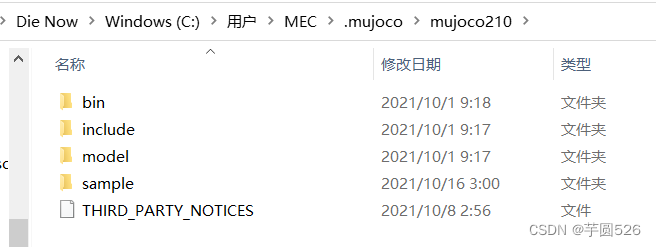
下载完成后我们来到C:\Users\MEC目录下,这里的MEC指的是用户名,我电脑上是MEC,你根据自己电脑的用户名随机应变。
在这个C:\Users\MEC目录下新建.mujoco文件夹,前面有个点一定要加上。然后我们再将之前下载的mujoco210-windows-x86_64.zip文件解压了放在这里面。最后是下图这个样子。
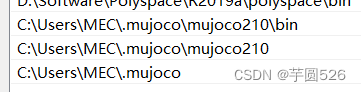
然后是配置环境变量,如下图,选择Path变量,
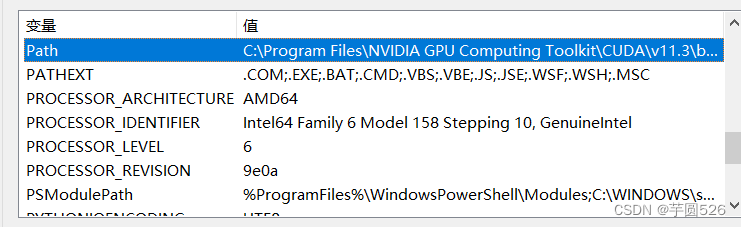
在里面加入我们刚刚新建的文件夹的路径。
环境配置换成后就是python环境的安装了。
pip install mujoco-py
pip install gym
执行完上面的命令,mujoco的环境就配置好了!
mujoco环境的测试
通过下面的代码,可以测试环境有没有正确地被安装好。
import gym
env = gym.make("Hopper-v2")
for i_episode in range(50):
observation = env.reset()
print("episode ", i_episode)
for t in range(1000):
env.render()
action = env.action_space.sample()
observation, reward, done, info = env.step(action)
if done:
print("Episode finished after {} timesteps".format(t+1))
break
env.close()
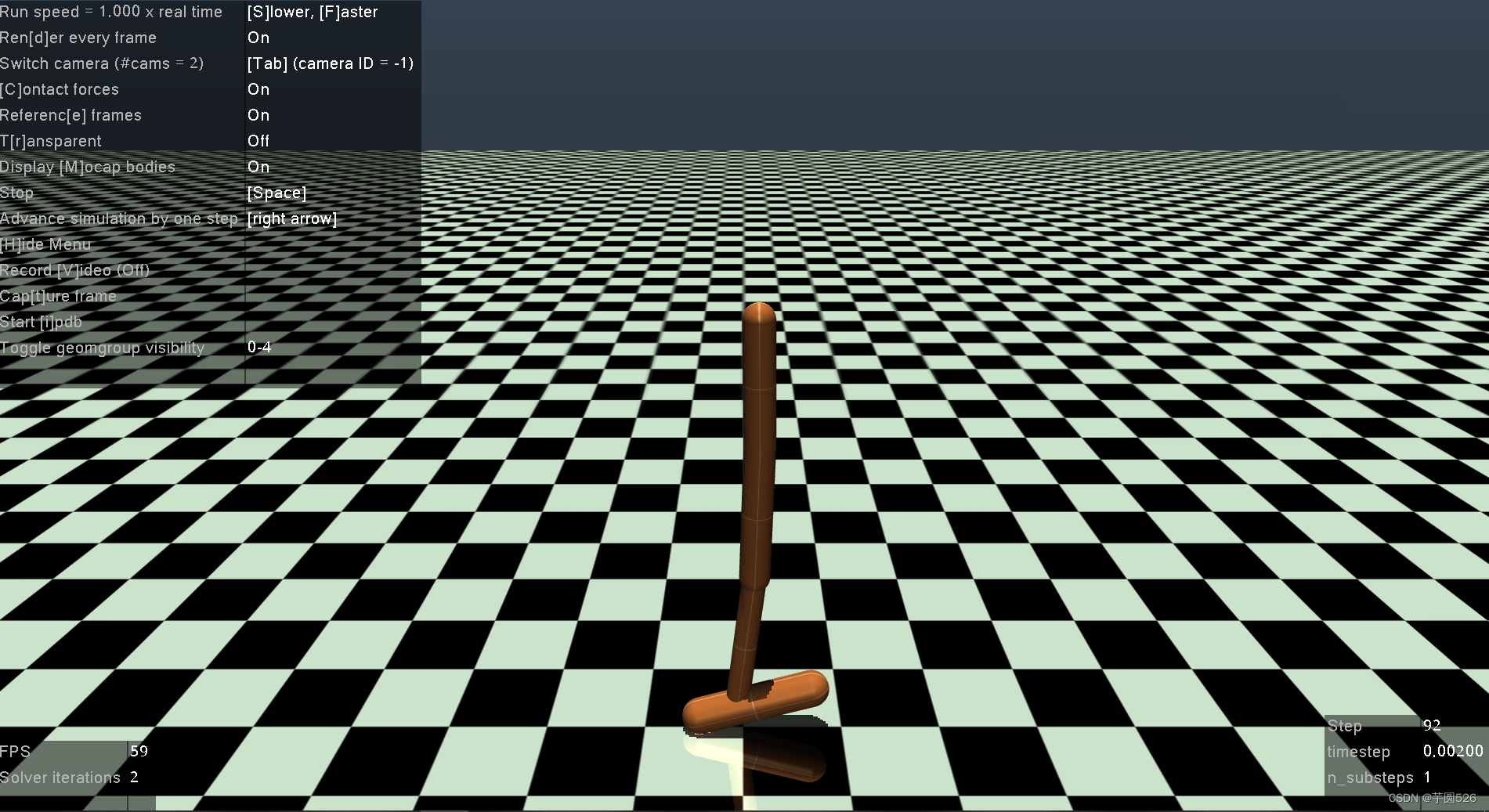
它的输出是这样的:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)