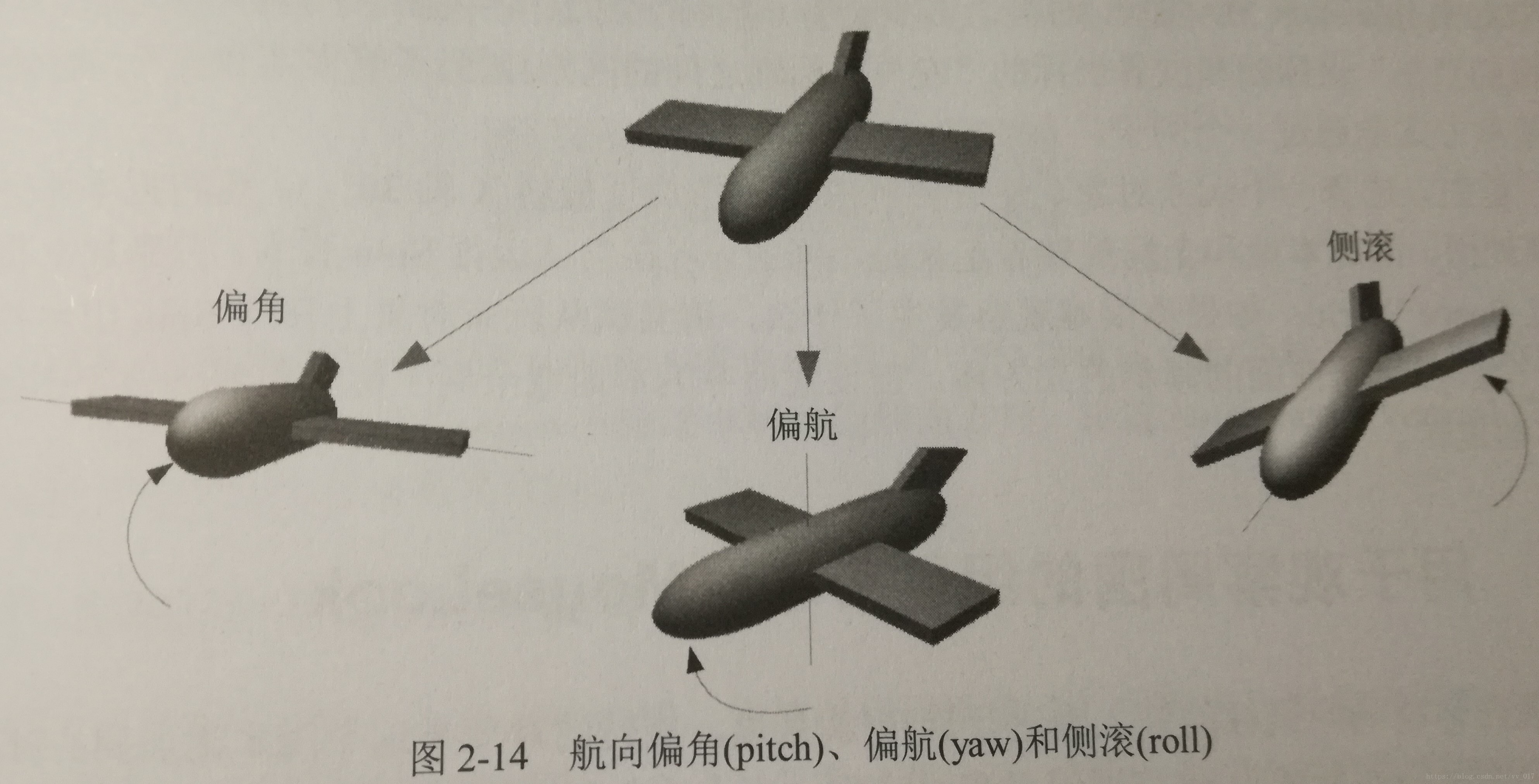
1.偏航角(yaw)
简单的定义:就是实际航向与计划航向之间的夹角 ,如图所示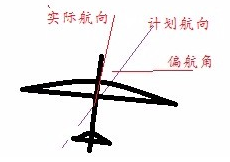
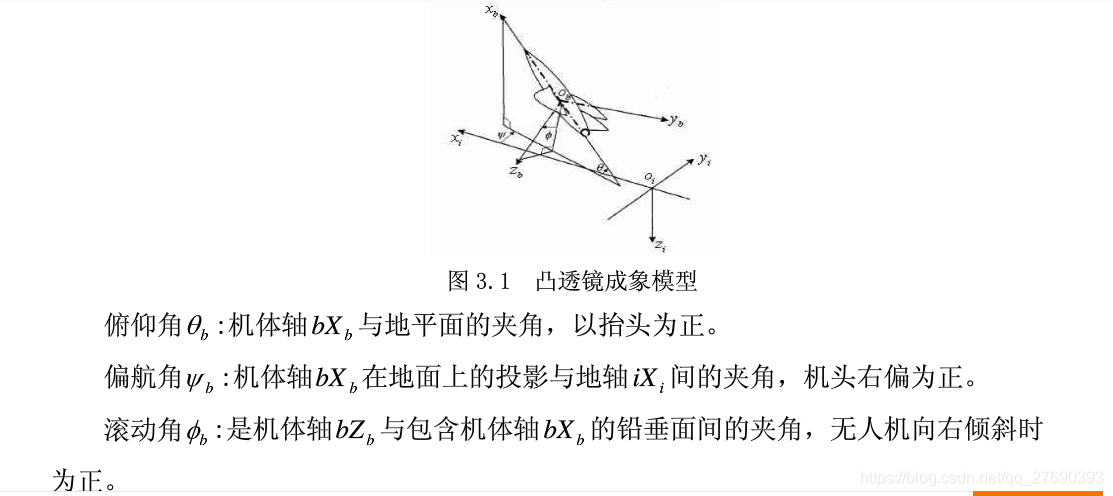
深刻的定义:机轴(沿机头方向)水平投影与地轴的夹角,如图所示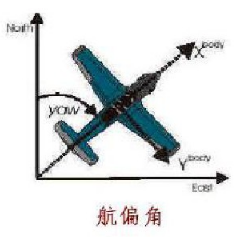
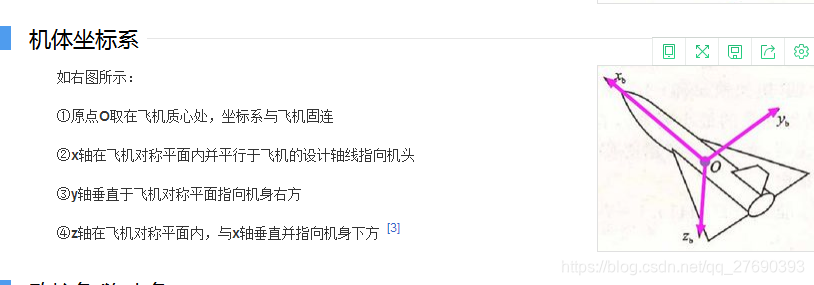
或者:如上图所示,机体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,反之为负。
 根据以上定义的机体坐标系,偏航角是按照z轴旋转的。即偏航就是绕着重力方向为轴旋转
根据以上定义的机体坐标系,偏航角是按照z轴旋转的。即偏航就是绕着重力方向为轴旋转
2.俯仰角(pitch)
简单的定义:机体轴(沿机头方向)与地平面(水平面 )之间的夹角,飞机抬头为正;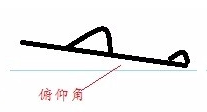
深刻的定义:机体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。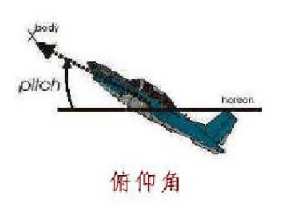
 根据以上定义的机体坐标系,俯仰角是按照y轴旋转的。也就是以翅膀所在的直线(机翼)为轴发生旋转。
根据以上定义的机体坐标系,俯仰角是按照y轴旋转的。也就是以翅膀所在的直线(机翼)为轴发生旋转。
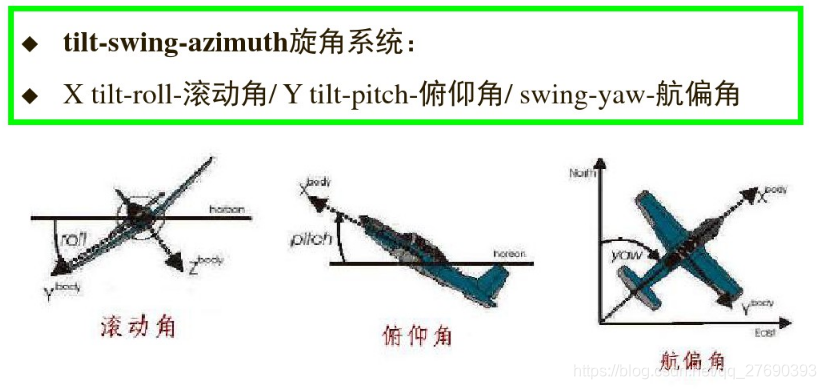
3.滚动角(roll)
简单的定义:物体绕前后轴线转动的角度为横滚角;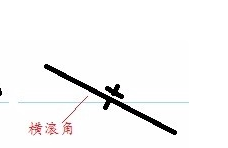
深刻的定义:机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,反之为负。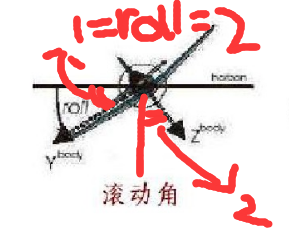 如图所画的,∠1=∠2=滚动角,也验证这个深刻的定义(我画的垂直的红色就是在包含机轴的垂直平面内)
如图所画的,∠1=∠2=滚动角,也验证这个深刻的定义(我画的垂直的红色就是在包含机轴的垂直平面内)
 根据以上定义的机体坐标系,滚动角是按照x轴旋转的。也就是以机轴(绕着机身所在的那个轴)为轴发生旋转。
根据以上定义的机体坐标系,滚动角是按照x轴旋转的。也就是以机轴(绕着机身所在的那个轴)为轴发生旋转。
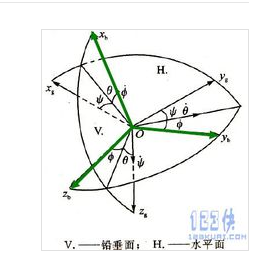
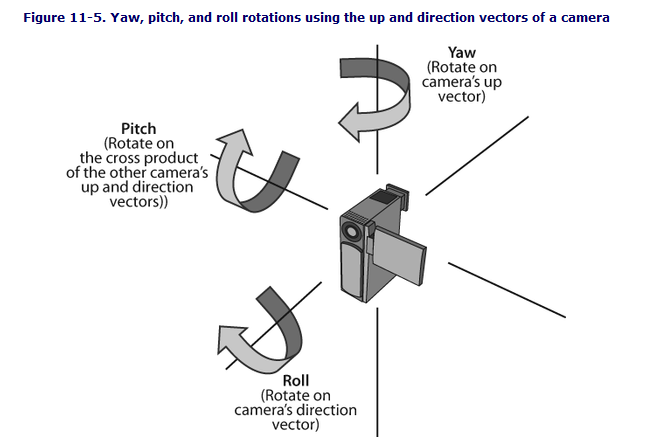
俯仰角(pitch),滚动角(roll),偏航角(yaw)的旋转轴关系:

俯仰角(pitch),滚动角(roll),偏航角(yaw)与摄影测量的fai,omiga,Kappa角的关系:
1.俯仰角(pitch)为fai角
2.滚动角(roll)为omiga角
3.偏航角(yaw)为Kappa角
推荐博客:
1.[图文]太原理工大学摄影测量学-第四章影像解析基础3-4 - 百度文库 https://wenku.baidu.com/view/98344e2d0129bd64783e0912a216147916117e24.html
2,Unity5实战读书笔记 —— 航向偏角(pitch)、偏航(yaw)和侧滚(roll) - vv_017的博客 - CSDN博客 https://blog.csdn.net/vv_017/article/details/80208068
3,无人机着陆信息预测与姿态控制 - 豆丁网 https://www.docin.com/p-982978977-f3.html
4.偏航角_百度百科 https://baike.baidu.com/item/%E5%81%8F%E8%88%AA%E8%A7%92/4783835?fr=aladdin
5.欧拉角pitch、yaw,roll的理解 - Dream World - CSDN博客 https://blog.csdn.net/sinat_27456831/article/details/50042915
6.Re:请问:俯仰角,横滚角,偏航角_百度知道 https://zhidao.baidu.com/question/366050156485394932.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)