实验课之前有一些问题
中断机制

第一个问题:
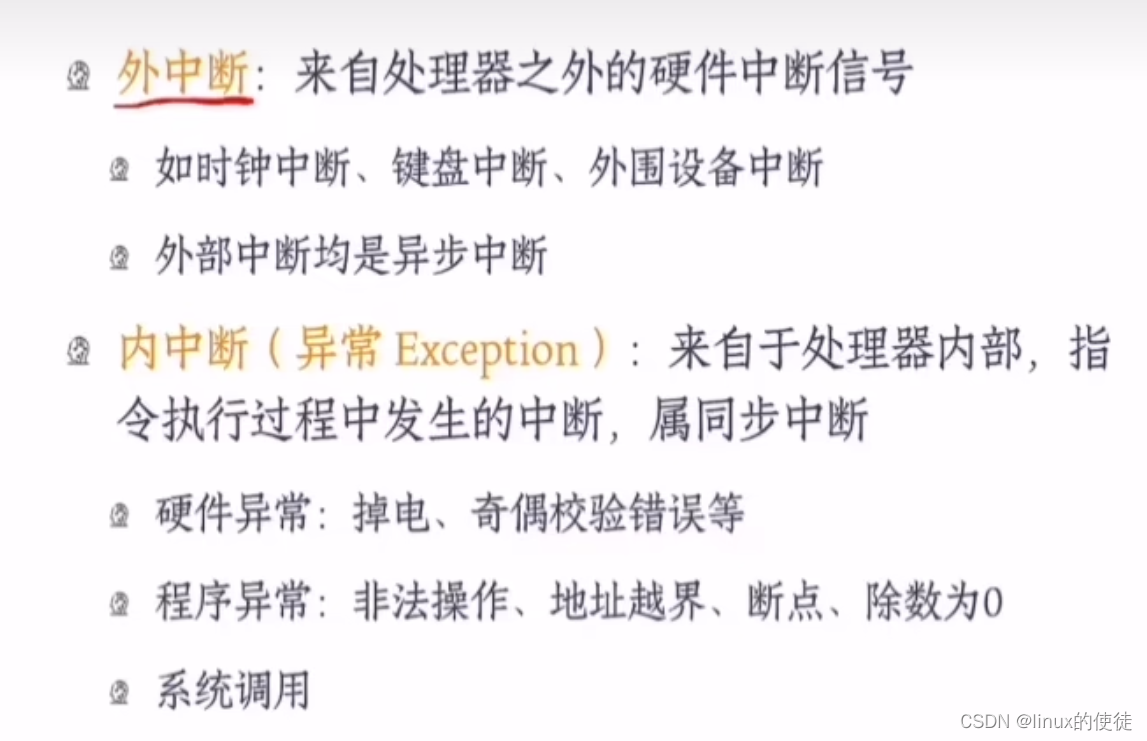
interrupt的两个状态源头:
外中断多由随机中断(异步中断)造成,如鼠标点击,键盘输入;
内终端多由故障终端:程序运行异常,硬件异常,系统调用是更高一级的调用,需要进入内核模式,也算是一个异常中断。
第二个问题:
进程的上下文信息
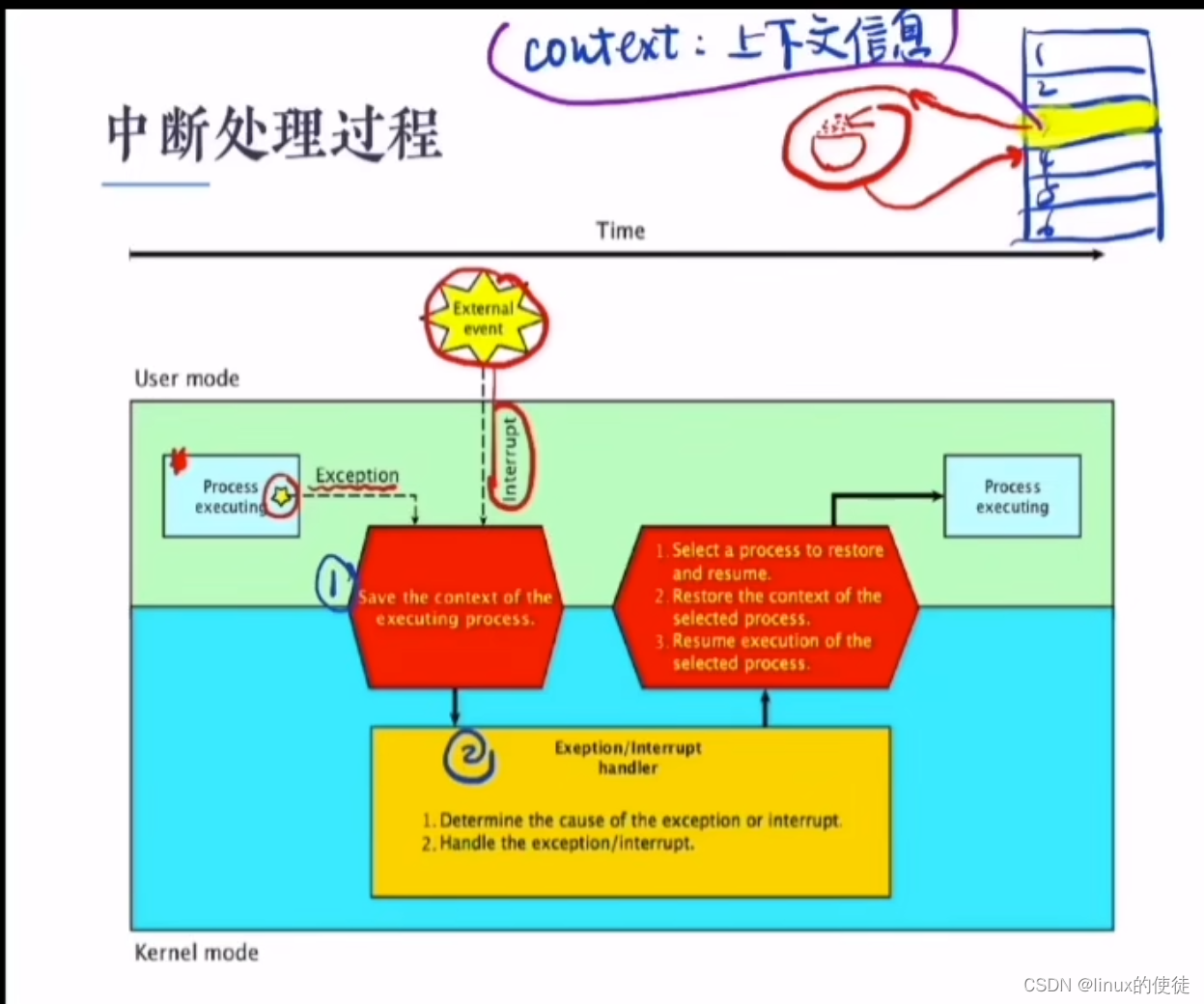
进程切换需要保存上下文(context),保存操作系统运行该程序的一些基本信息,保护住此程序的内存区
从cpu的层面就是保存当前系统运行的寄存器内的内容(push入对应堆栈)
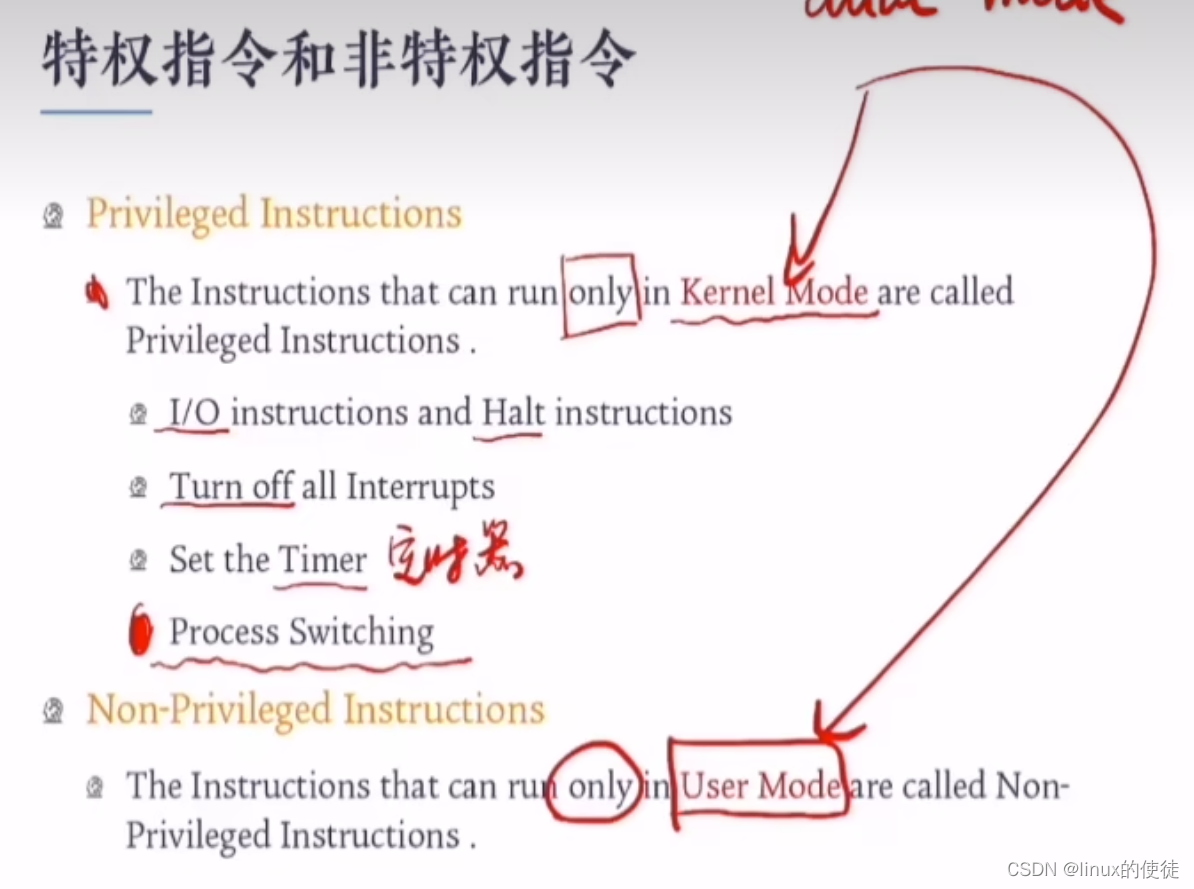
一般来说由硬件分辨双模式(dual mode),status=0为内核模式,status=1为用户模式。
 一般发生中断时,cpu模式从user mode立刻切换到 kernel mode
一般发生中断时,cpu模式从user mode立刻切换到 kernel mode
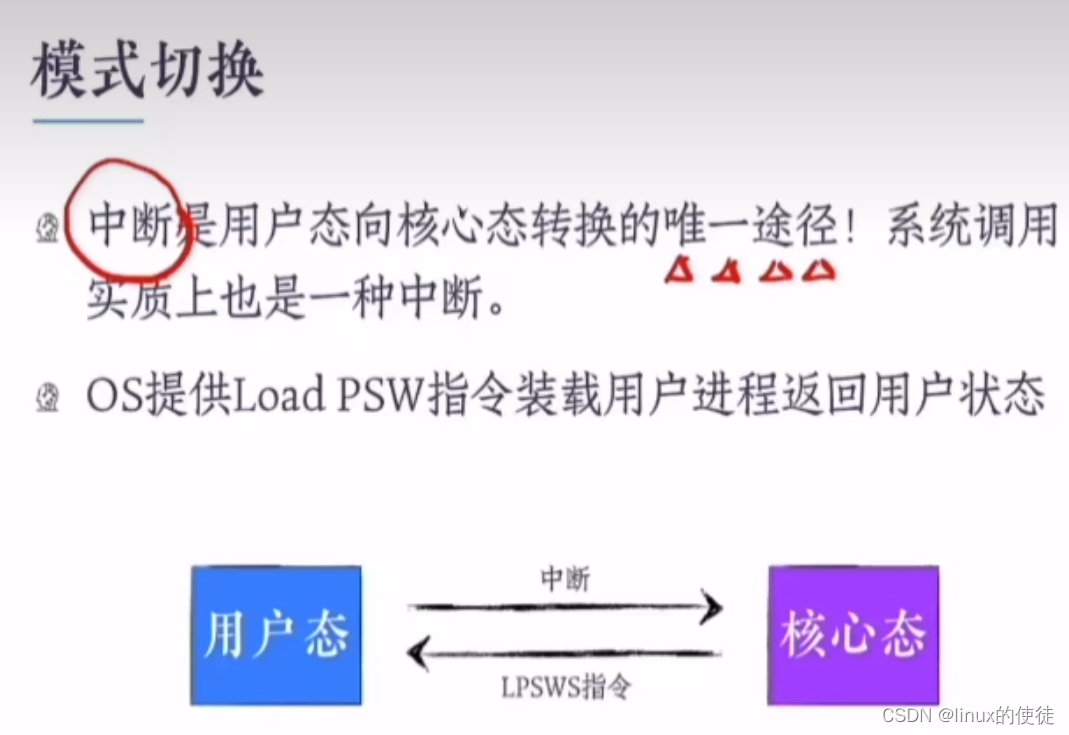 对应这张图的判断状态码和处理中断程序阶段
对应这张图的判断状态码和处理中断程序阶段

进程切换
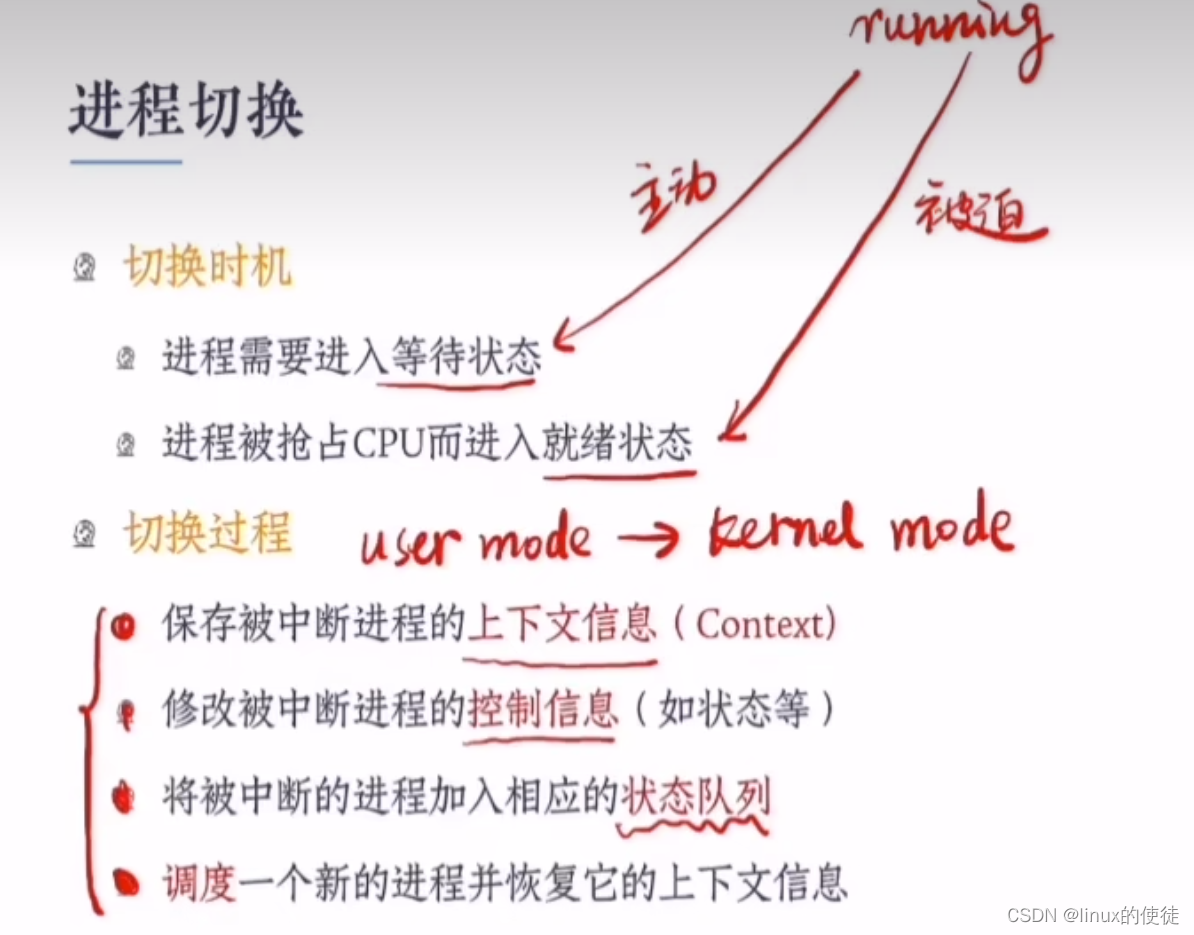
这里状态队列分为等待状态和就绪状态。
那么一个进程的状态究竟放在什么地方呢?
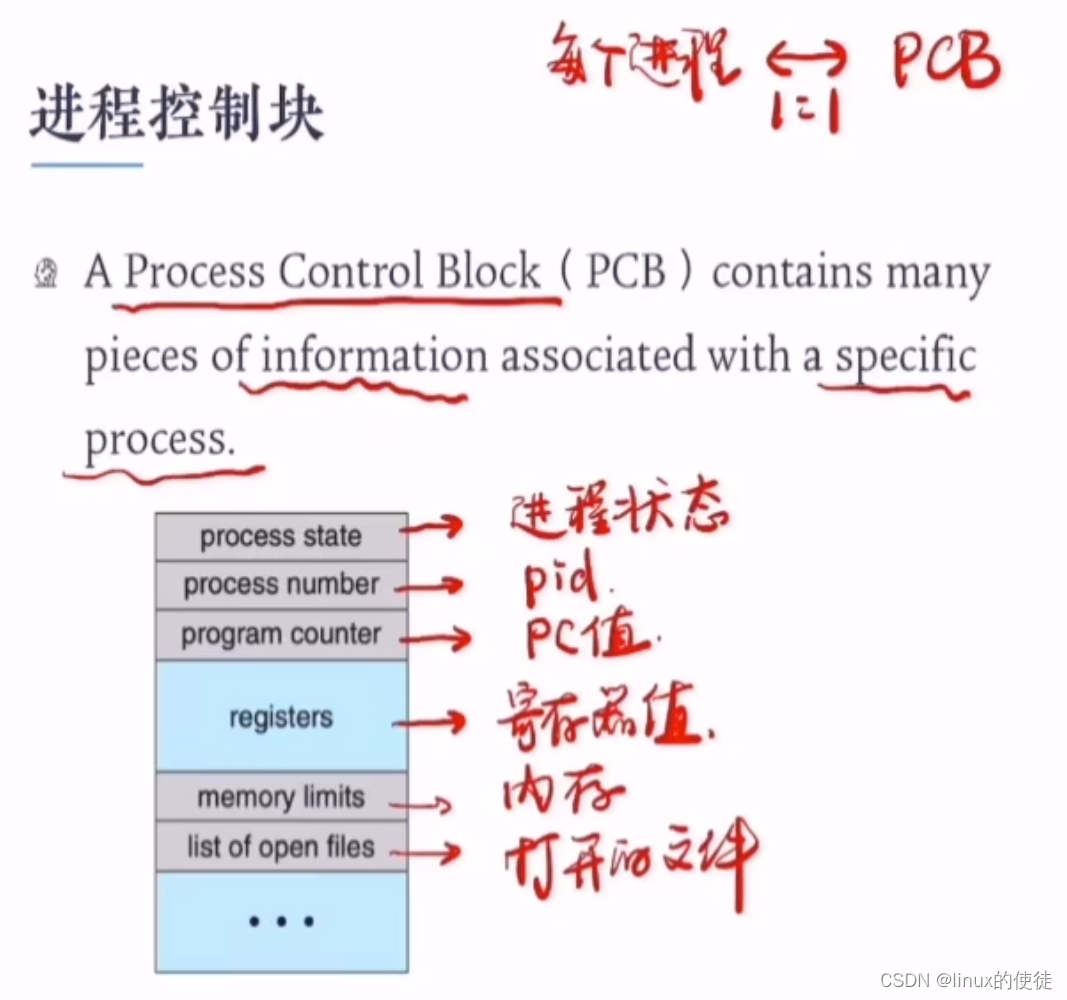 每个进程都有一个pcb相对应
每个进程都有一个pcb相对应
所以一个进程完整的内存部分(context)包含什么呢?

但这些部分在内存中并非连续的而是离散的

猜测这里大概是虚内存,估计后面课程会有讲解,因为我们都知道硬件读取都是顺序的。
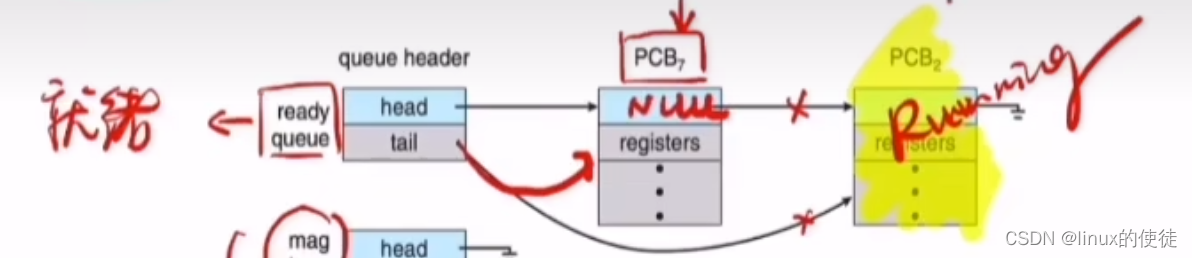
状态队列
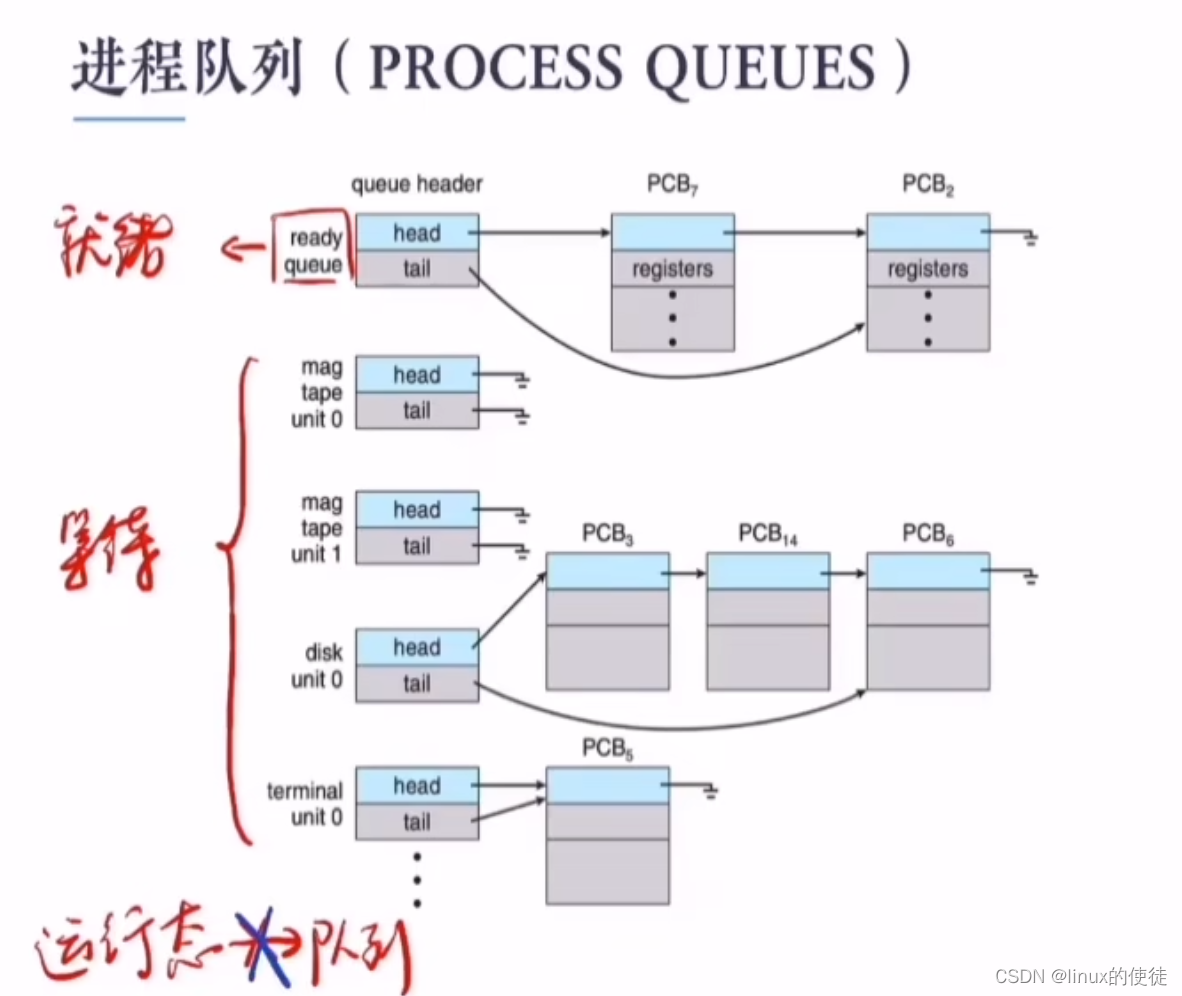
不同的i/o设备由不同的等待队列,所以有多个等待队列
运行状态队列是没有的,理论上来说单核cpu只有一个进程处于运行状态
而且我们可以看到,他们查询进程实体时只需要查询链接的pcb即可
就绪队列出列
进程调度
其实就是调度器将存在的进程在各种状态之间切换
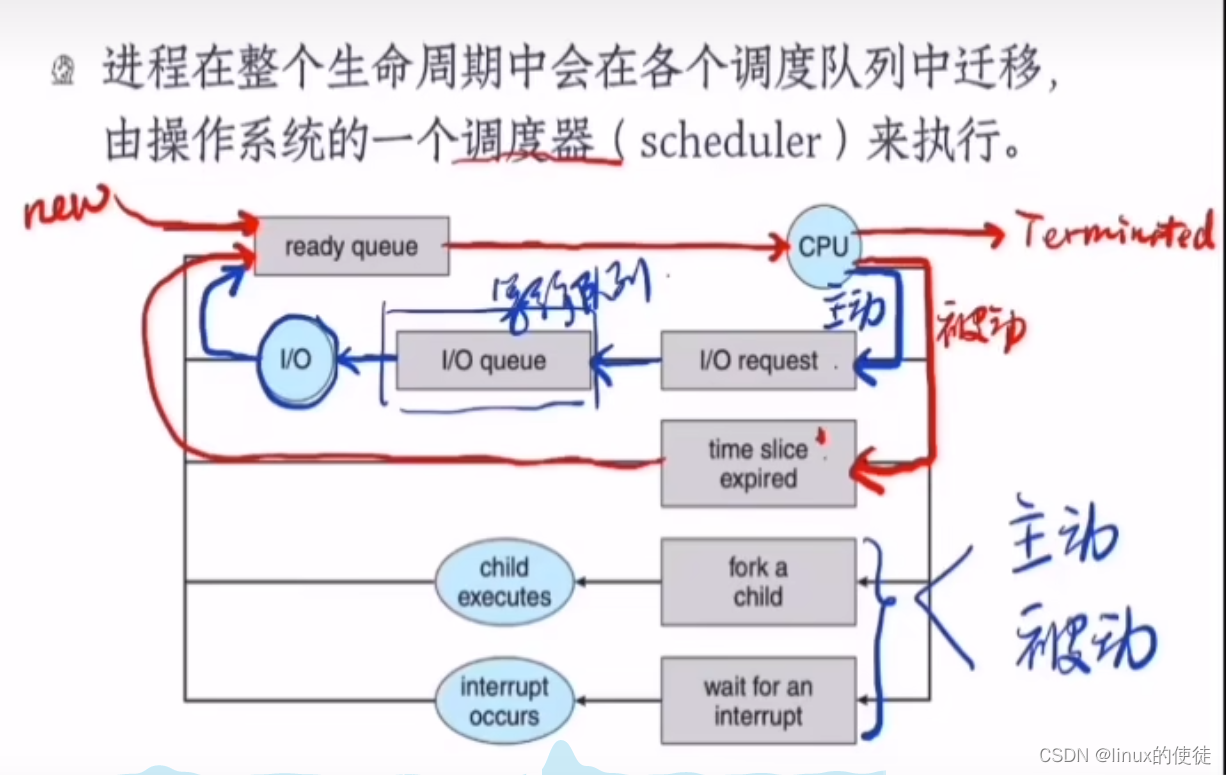
这里有一个问题下面有两个事件,一个事件是cpu执行分支子进程;一个事件是中断事件发生。这两个事件是主动还是被动?
我目前认为子进程分支执行是父进程调用,所以是主动;中断发生根据前面可以判断这里大概率不是调用i/o设备导致的中断,应该是父进程调用子进程产生的并发,如果是这样估计也是主动,但这里只是我的猜想。后面课程估计会有答案。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)