当我们在Odroid上安装了linnux系统后,需要将电脑与Odroid进行连接:
一方面可以方便的把在电脑中调试成功的代码拷入odroid运行,毕竟相比于电脑,Odroid还是很卡的。。
另一方面,由于Odroid没有显示屏也没有键盘鼠标,我们如果想用Odroid去外部控制PX4,就需要在执行任务时用电脑把Odroid中的ROS节点跑起来
将主机和Odroid连接的方法有两种,一种是通过网线,一种是建立无线局域网
方法1:
1. 用网线连上主机和odroid后,设置网络本地IP
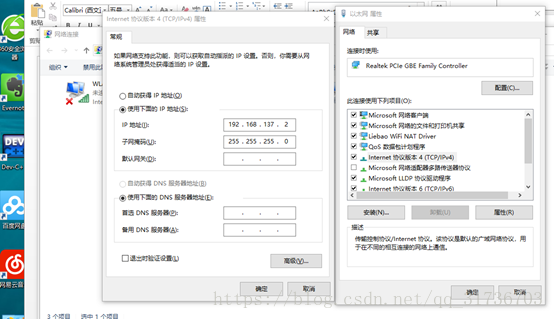
2.设置IP地址为192.168.137.随便(odroidIP地址已经设置为192.168.137.100,前三位相同则为同一局域网)
此时cmd:arp-a可以查到IP地址
3.使用VNCViewer,新建连接,输入odroid地址192.168.137.100
4.输入odroid密码:odroid
方法2
1. 在odroid的USB接口上连接无线模块
2. 使用VNC Viewer连上odroid,并用odroid搜索待使用的笔记本生成的无线网络,连上后断开电脑vnc即可
3. 用笔记本中的VNC连接odroid,使用时的odroid地址在猎豹wifi中可以查看。
4. 在初次使用以后,odroid会自动连接该无线。
主机和Odroid相连后,相当于利用主机的键盘鼠标和显示屏控制Odroid,但是不能将主机系统中的文件拷入Odroid系统中,
这时需要利用另一个软件WinSCP
1. 将电脑与odroid用网线连上,并设置IP:192.168.137.2
2. 主机名设置为odroid的IP,既192.168.137.100,端口号为22
3. 用户名和密码都是Odroid

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)