项目场景
Idea使用DateSource插件连接SqlServer数据库报错
问题描述
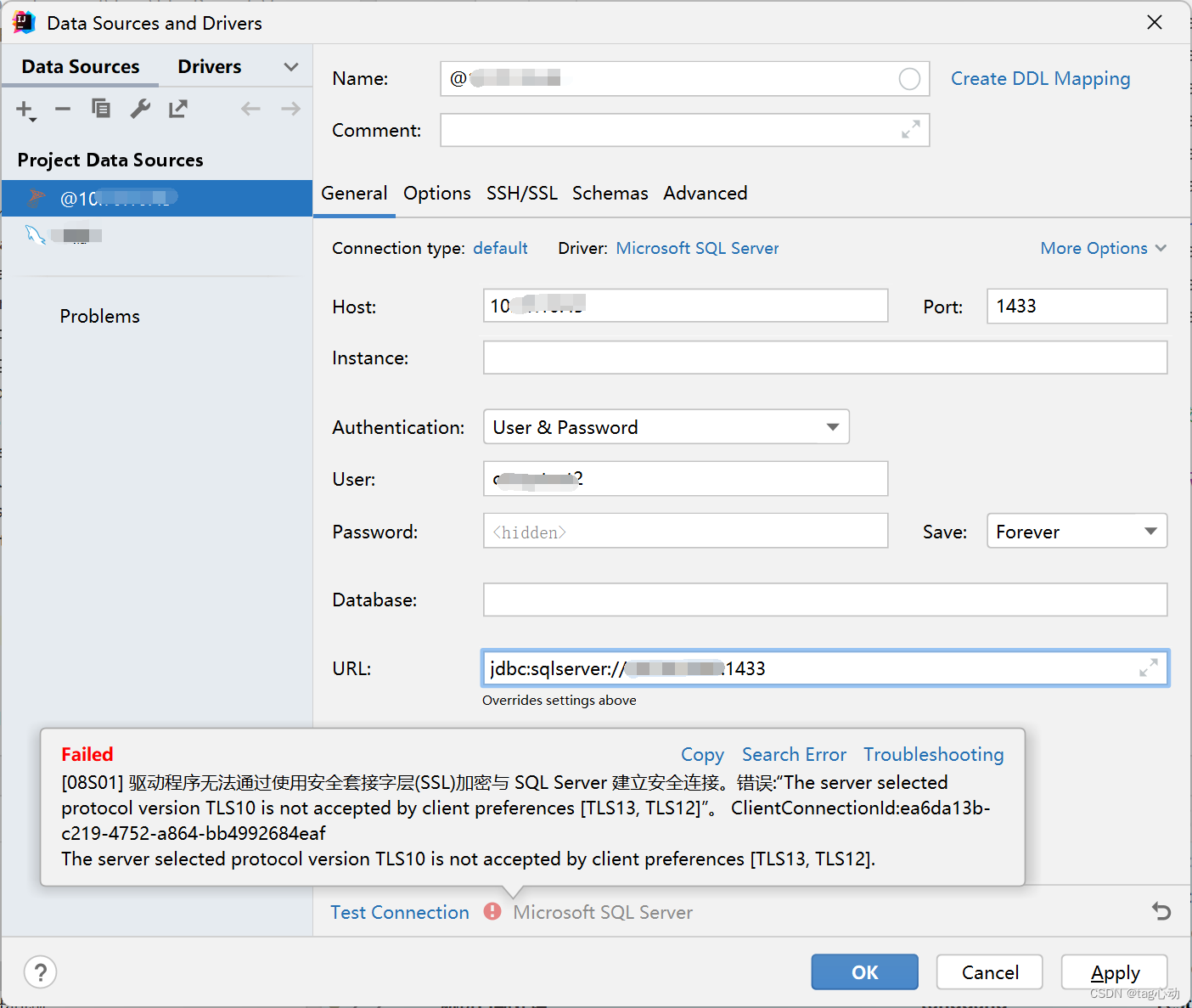
[08S01] 驱动程序无法通过使用安全套接字层(SSL)加密与 SQL Server 建立安全连接。错误:“The server selected protocol version TLS10 is not accepted by client preferences [TLS13, TLS12]”。 ClientConnectionId:da918ed5-2615-4bbb-a54b-c184ada18897
The server selected protocol version TLS10 is not accepted by client preferences [TLS13, TLS12].
解决方案
方案一:修改jdk(推荐)
编辑java.security文件。找到自己本地jdk安装目录:..\jre1.8.0_301\lib\security\java.security
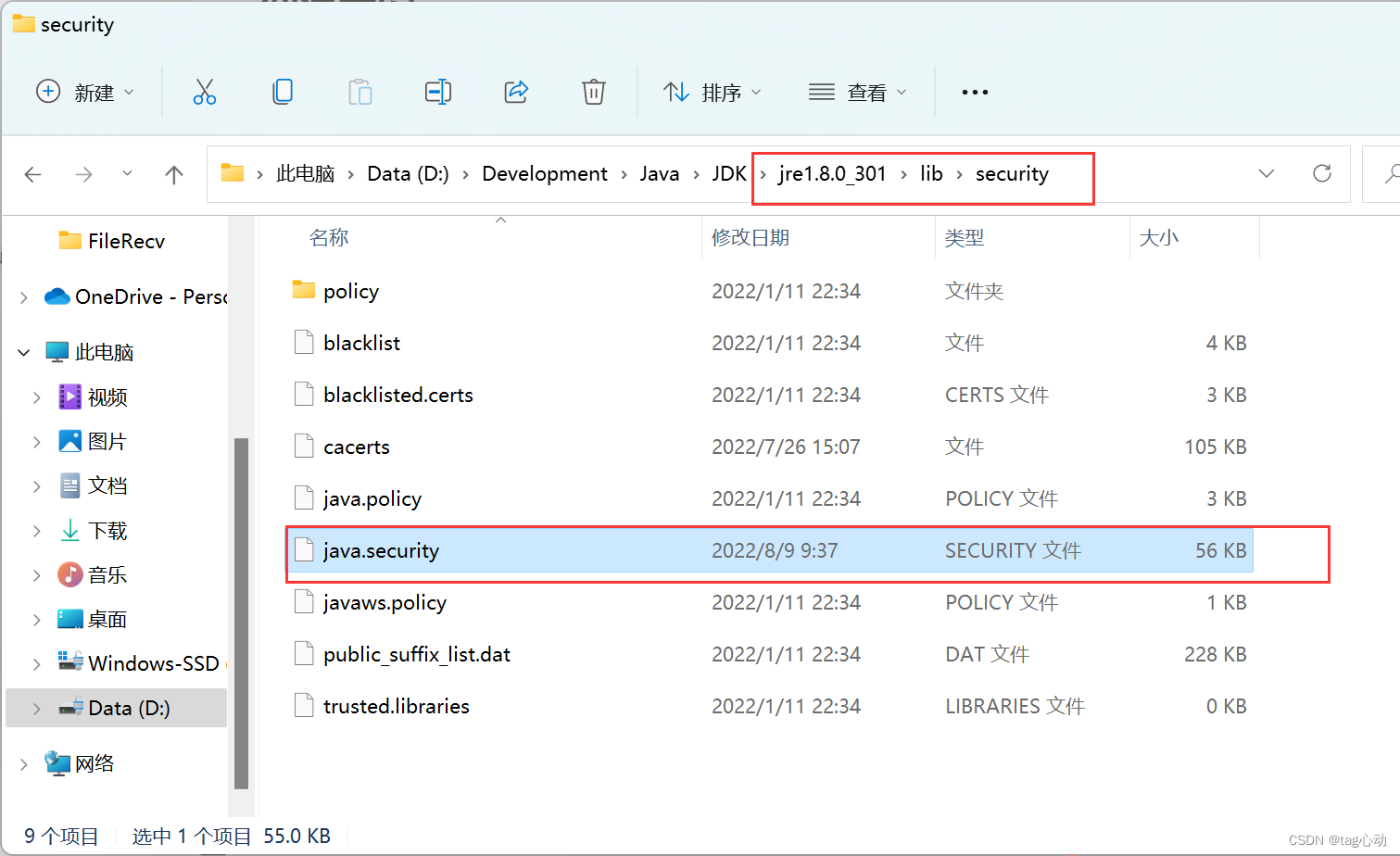
文件内搜索:jdk.tls.disabledAlgorithms=
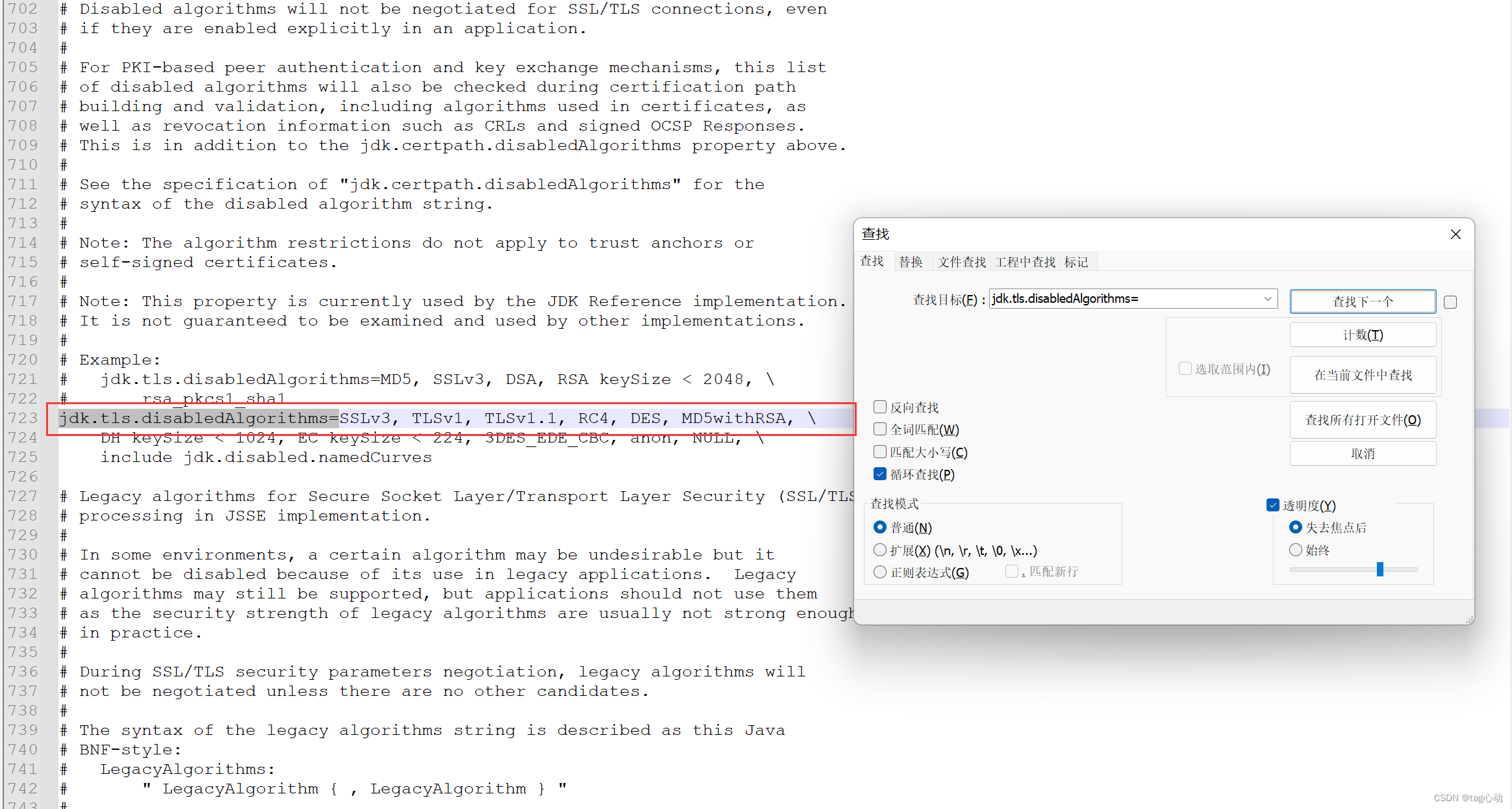
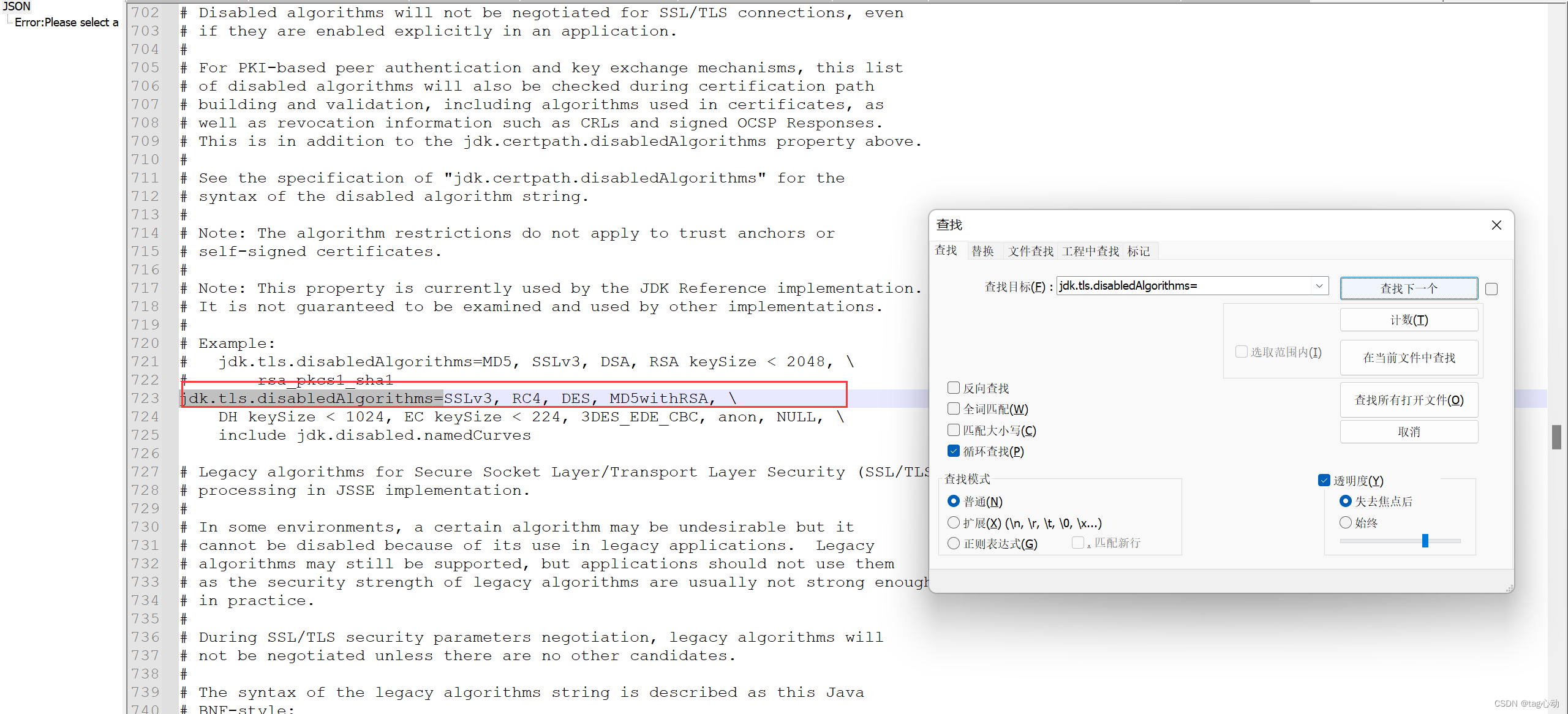
将其中的TLSv1, TLSv1.1配置删除掉即可,这2个配置是Java高版本中增加的,低版本不存在这2个配置。
保存后重新测试,发现已经成功解决!
方案二:修改idea
1.修改idea根目录java.security文件
xxx\ideaIU-2021.3.win\jbr\conf\security
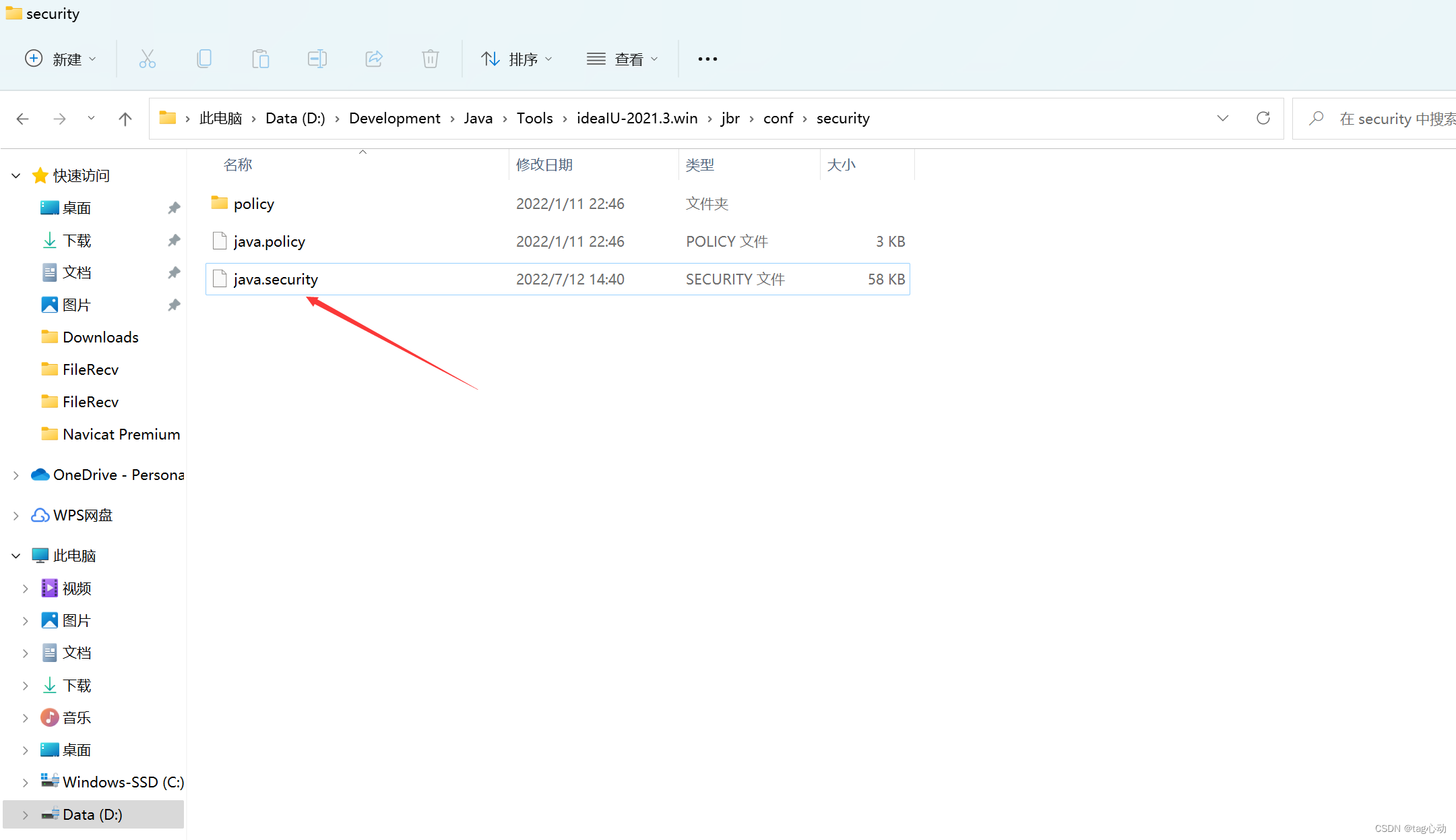
2.修改配置参数
打开文本搜索“jdk.tls.disabledAlgorithms=”,大概在731行位置
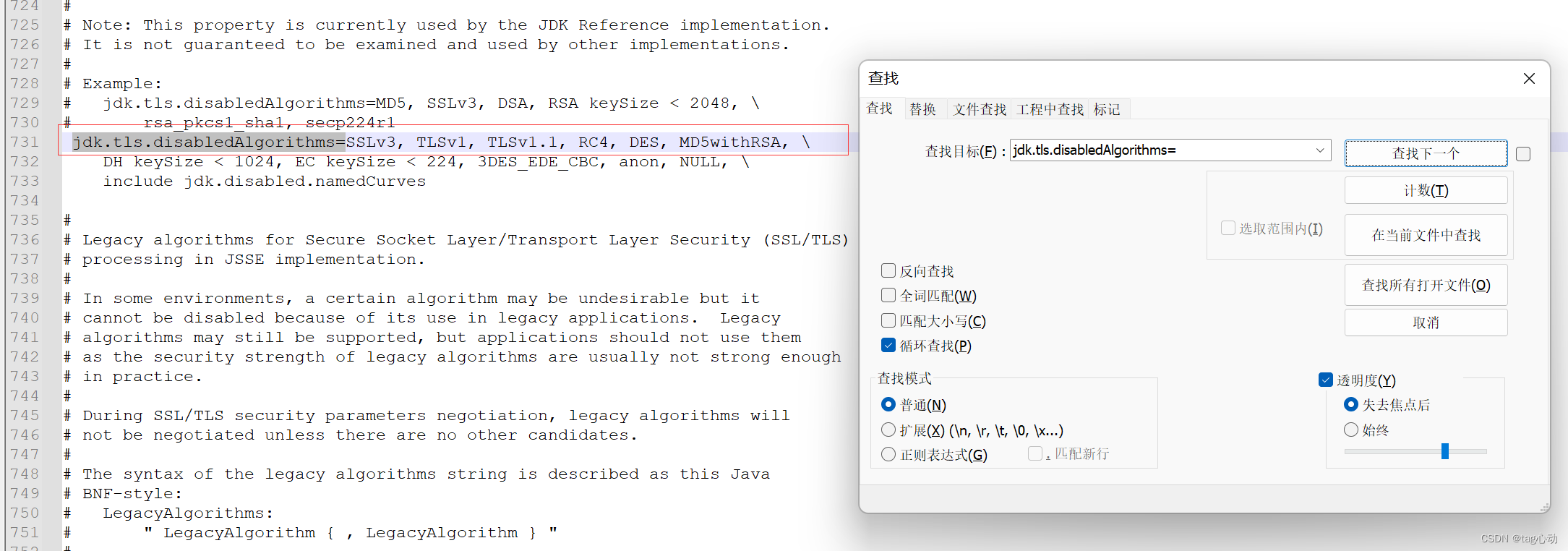
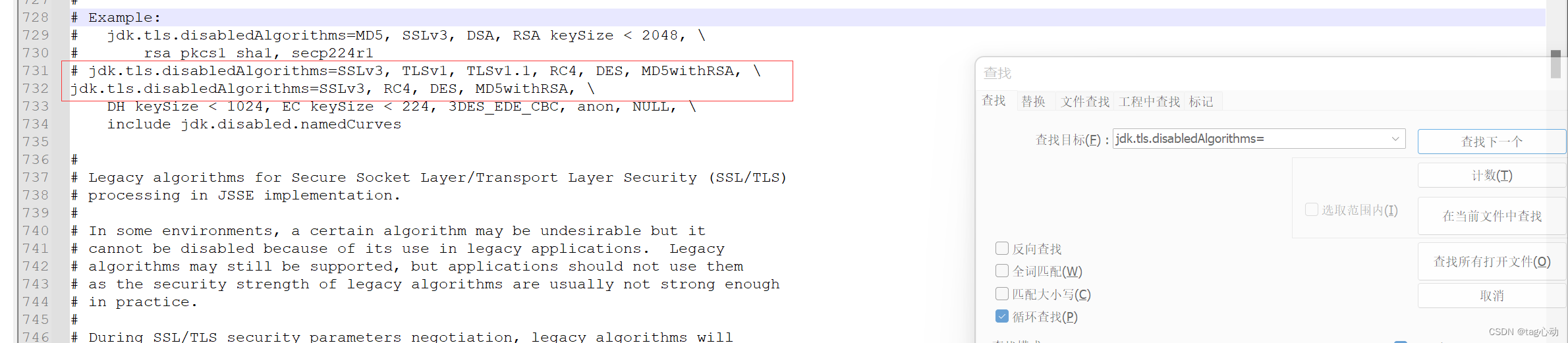
删除TLSv1, TLSv1.1
修改前:
jdk.tls.disabledAlgorithms=SSLv3, TLSv1, TLSv1.1, RC4, DES, MD5withRSA, \
DH keySize < 1024, EC keySize < 224, 3DES_EDE_CBC, anon, NULL, \
include jdk.disabled.namedCurves
修改后:
jdk.tls.disabledAlgorithms=SSLv3, RC4, DES, MD5withRSA, \
DH keySize < 1024, EC keySize < 224, 3DES_EDE_CBC, anon, NULL, \
include jdk.disabled.namedCurves
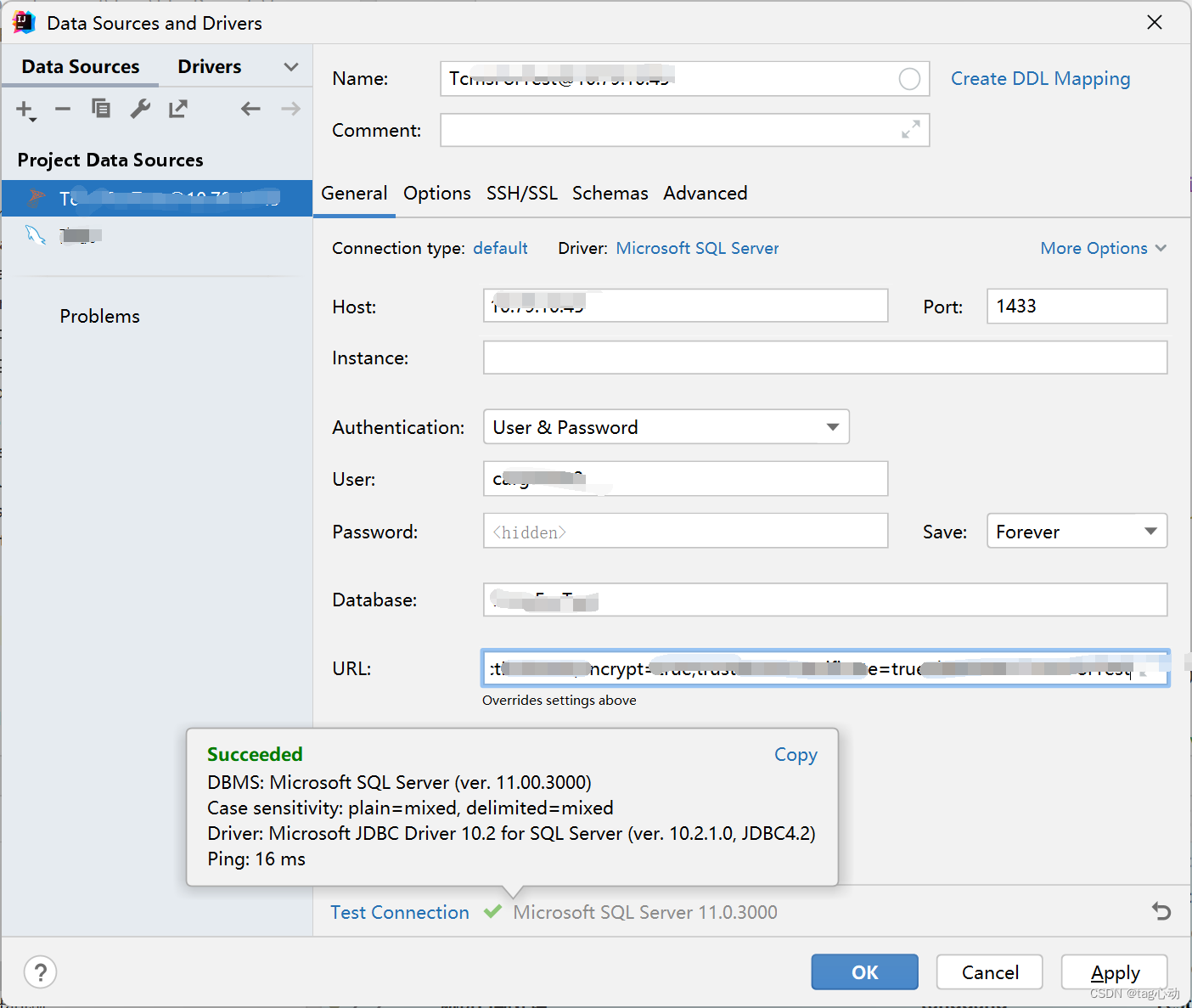
保存后配置DateSource连接
URL配置:
jdbc:sqlserver://ip:1433;database=数据库名称?autoReconnectForPools;encrypt=true;trustServerCertificate=true;database=数据库名称
测试连接
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)