#2018.8.2 【microPython】import sensor, image, time , pyb
from pyb import UART
from pyb import Timer
from pyb import LED
import json
led = pyb.LED(3)# Red LED = 1, Green LED = 2, Blue LED = 3, IR LEDs = 4.
thresholds =[(27,67,19,91,45,76),# 红色#(21, 75, 3, -38, 34, 68), # 绿色(27,90,-3,-28,31,125),(0,30,0,64,-128,0)]# generic_blue_thresholds
threshold_index =1# 0 for red, 1 for gre9en, 2 for blue
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)#320*240
sensor.skip_frames(time =100)
sensor.set_auto_gain(False)# must be turned off for color tracking
sensor.set_auto_whitebal(False)# must be turned off for color tracking
clock = time.clock()
uart = UART(3,115200)
uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000)# 使用给定参数初始化deftick(timer):# we will receive the timer object when being calledglobal data
if blobs:print("Find")print('you send:',output_str)
uart.write(data)
tim = Timer(4, freq=10)# create a timer object using timer 4 - trigger at 1Hz
tim.callback(tick)# set the callback to our tick functiondeffind_max(blobs):
max_size=0for blob in blobs:if blob[2]*blob[3]> max_size:
max_blob=blob
max_size = blob[2]*blob[3]return max_blob
defUart_Receive():#UART接收 改变框小球的颜色阈值global threshold_index
if uart.any():
temp_data = uart.readchar()if temp_data==0:#红色
threshold_index=0print(temp_data,threshold_index)elif temp_data==1:
threshold_index=1print(temp_data,threshold_index)while(True):
clock.tick()
img = sensor.snapshot()
Uart_Receive()
blobs = img.find_blobs([thresholds[threshold_index]])if blobs:
max_blob = find_max(blobs)
b = max_blob[0]#方框元组
L =(max_blob[2]+max_blob[3])/2
l=int(1000/L)#x_error = max_blob[5]-img.width()/2 #求横向偏差
x_error = max_blob[5]-img.width()/2
img.draw_rectangle(max_blob[0:4])# 画矩形
img.draw_cross(max_blob[5], max_blob[6])# 画十字#发送 小球的(x,y,l,n)#x为横坐标,y为纵坐标,l为粗略的距离,n为小球颜色(0:红 1:绿)
output_str="%d,%d,%d,%d"%(max_blob.cx(),max_blob.cy(),l,threshold_index)#10进制字符包
checkout=0xAA+0x55+0x07+int(max_blob.cx()/2)+max_blob.cy()+l+threshold_index
data =bytearray([0xAA,0x55,0x07,int(max_blob.cx()/2),max_blob.cy(),l,threshold_index,0x00,0x00,checkout])#转成16进制#uart.write(data)
time.sleep(1)
led.on()else:print("NO FIND")
data =bytearray([0xAA,0x55,0x07,0x00,0x00,0x00,0x00,0x00,0x00,0x06])
uart.write(data)
led.off()
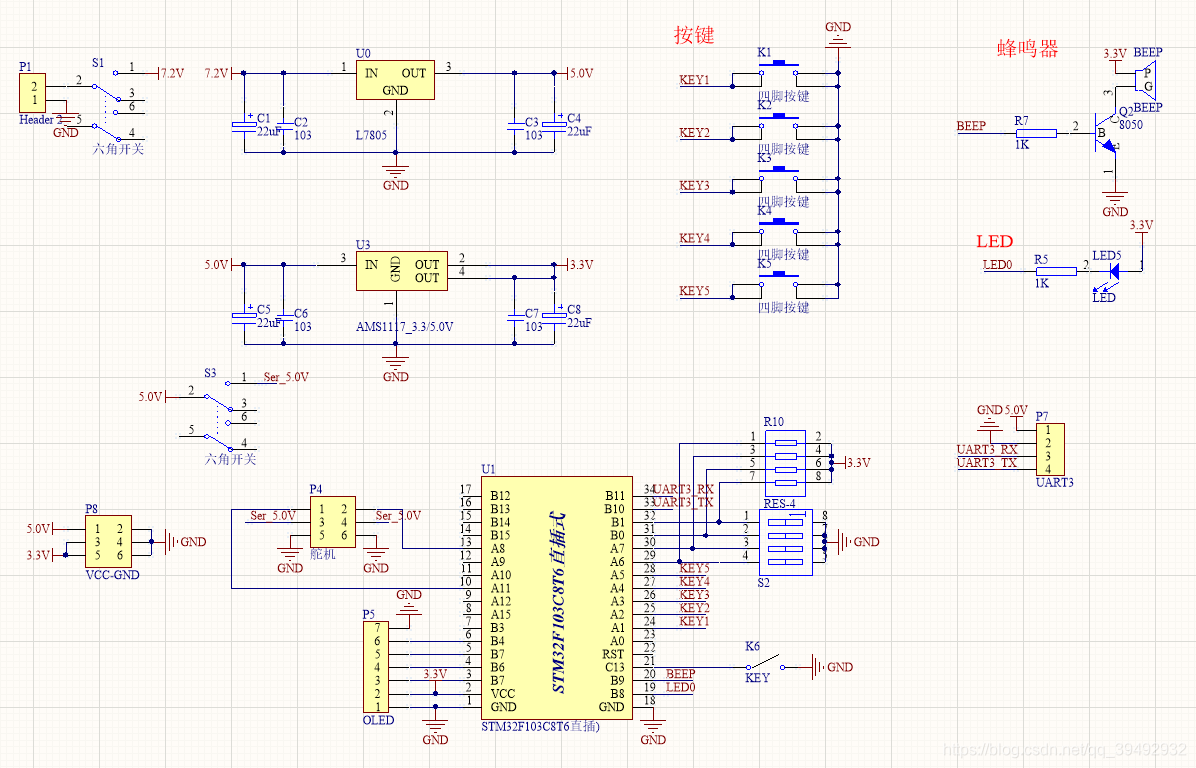
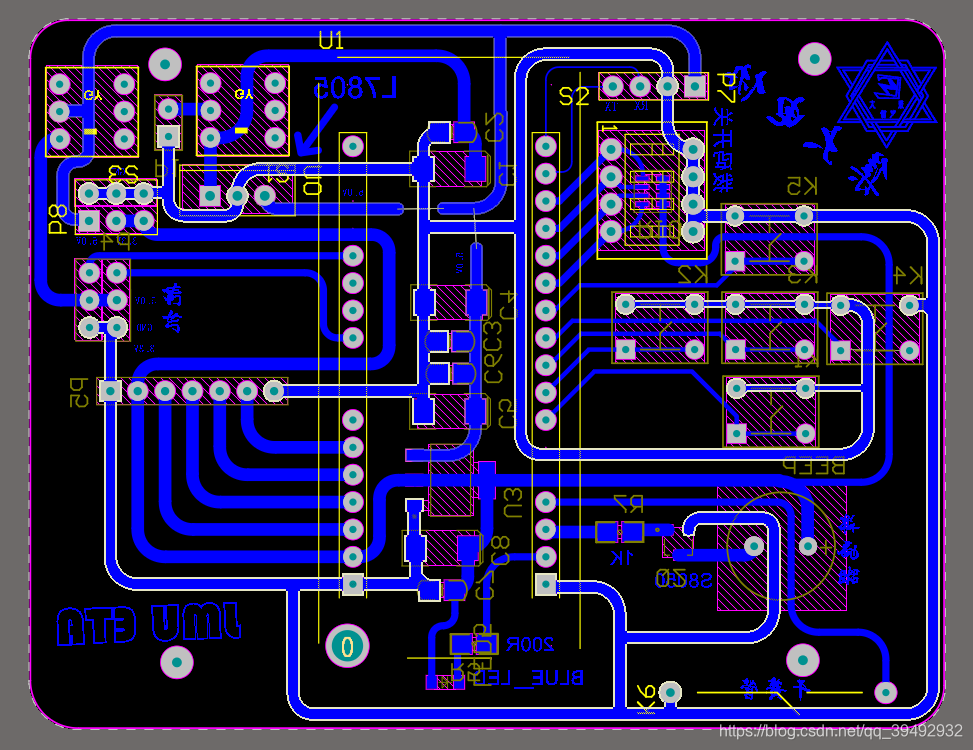
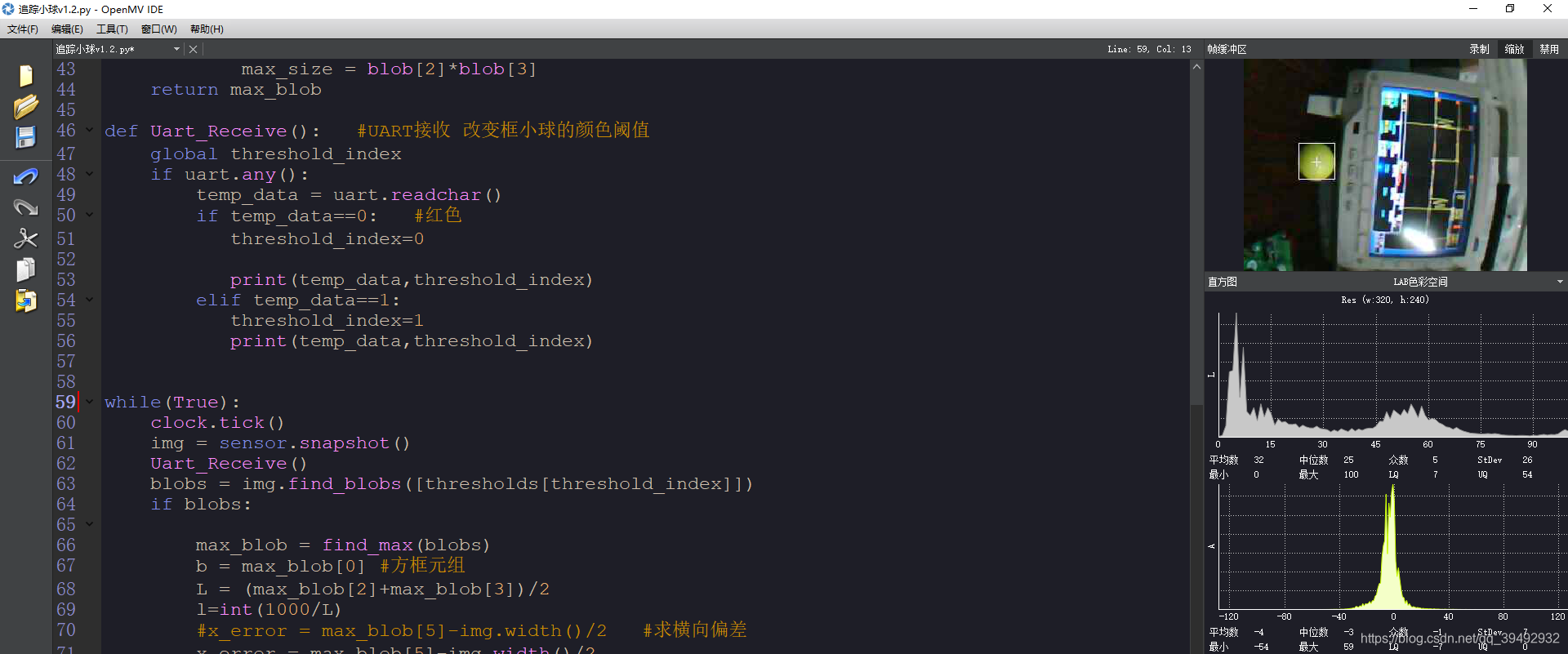
 图3 抓取到绿色小球
图3 抓取到绿色小球
 图4 抓取到红色小球
图4 抓取到红色小球
 图1 小车整体效果图
图1 小车整体效果图
 图2 小车整体效果图
图2 小车整体效果图
