已剪辑自: https://mp.weixin.qq.com/s?__biz=MzA4NTcwMDQwMg==&mid=2650814148&idx=1&sn=108023bb2ae7284b4ae06525f2e45cf9&chksm=84276c99b350e58f67e10e175e61bb8a32f2fc0cc9ff9fca727563adbcb38602290c020c8059&scene=21#wechat_redirect
来源:佐思汽研《2022年多域计算和区域控制器研究报告》
来源:知行科技
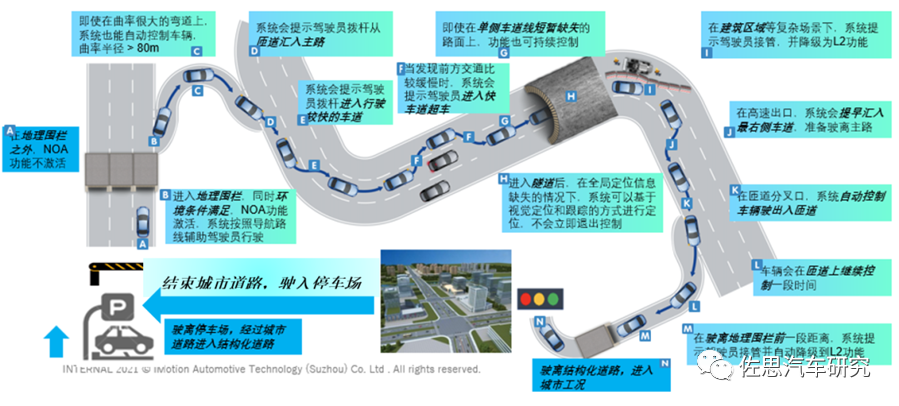
来源:知行科技

来源:东软睿驰
来源:网络

来源:佐思汽研《2022年多域计算和区域控制器研究报告》

来源:网络
来源:网络
来源:网络
《2022年多域计算和区域控制器研究报告》目录
01
多域计算演进趋势
1.1 多域融合计算和中央计算机演进趋势
1.2 多域融合计算推动硬件、软件、通信及电源升级
1.3 Zonal EEA演进的三个阶段
1.3.1 Zonal EEA演进的三个阶段:Zonal EEA1.0架构特征
1.3.2 Zonal EEA演进的三个阶段:Zonal EEA2.0架构特征
1.3.3 Zonal EEA演进的三个阶段:Zonal EEA3.0架构特征
1.3.4 Zonal EEA演进的三个阶段:最常见的演进逻辑
1.4 Zonal EEA和中央计算平台面临的挑战(1)
1.5 Zonal EEA和中央计算平台面临的挑战(2)
1.6 Zonal EEA和中央计算平台面临的挑战(3)
1.7 HPC+ Zonal EEA进一步促进汽车价值链重构
02
典型的多域计算架构思路
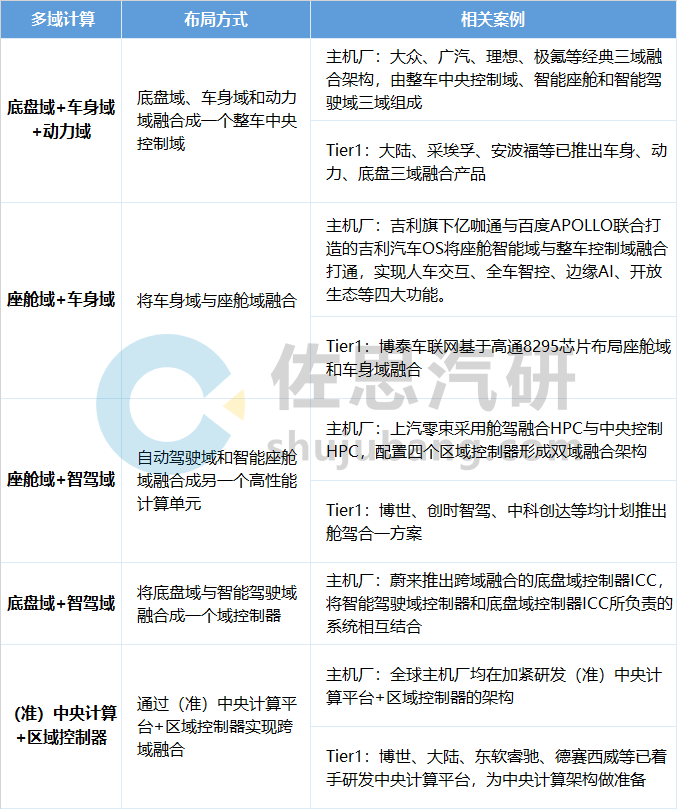
2.1 多域计算发展现状:五类融合思路
2.2 多域融合计算思路一:动力+底盘+车身域融合(整车控制域)
2.2.1 整车控制域多域融合计算:大众
2.2.2 OEM主机厂整车控制器域方案总结(1)
2.2.3 OEM主机厂整车控制器域方案总结(2)
2.3 多域融合计算思路二:座舱+自动驾驶域融合
2.3.1 驾舱合一多域融合计算:车联天下
2.3.2 驾舱合一多域融合计算:上汽零束3.0舱驾融合计算平台
2.3.3 驾舱合一多域融合计算:博世面向未来的舱驾合一计算平台
2.4 多域融合计算思路三:座舱域+车身域
2.4.1 座舱域+车身域多域融合计算:博泰车联网
2.4.2 座舱域+车身域多域融合计算:吉利
2.5 多域融合计算思路四:底盘域+智驾域
2.5.1 底盘域+智驾域多域融合计算:长城汽车
2.5.2 底盘域+智驾域多域融合计算:蔚来汽车
2.6 多域融合计算思路五:(准)中央计算+区控制器
2.6.1 OEM主机厂(准)中央计算+区控制器方案总结(1)
2.6.2 OEM主机厂(准)中央计算+区控制器方案总结(2)
2.6.3 OEM主机厂(准)中央计算+区控制器方案总结(3)
2.6.4 OEM主机厂(准)中央计算+区控制器方案总结(4)
2.7 多域融合计算思路总结
2.7.1 主要车企多域融合及中央集中架构量产时间线
2.7.2 主要Tier1跨域融合EEA趋势下的布局(1)
2.7.3 主要Tier1跨域融合EEA趋势下的布局(2)
2.7.4 主要Tier1跨域融合EEA趋势下的布局(3)
03
多域计算关键系统
3.1 区域控制器
3.1.1 区域控制器介绍
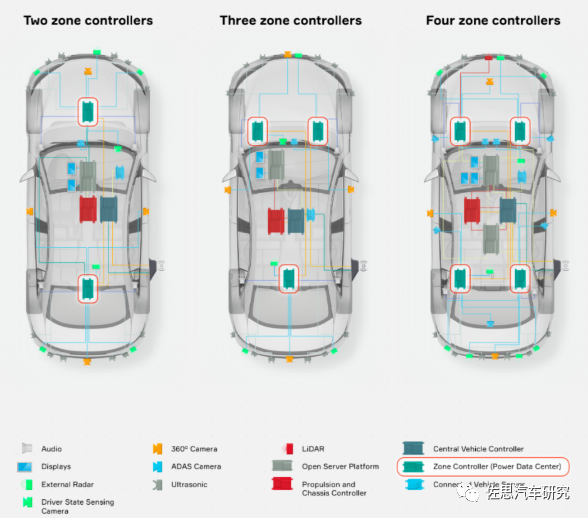
3.1.2 区域控制器典型布置方案和功能分配
3.1.3 区域控制器三大功能:整车区域配电中心(1)
3.1.4 区域控制器三大功能:整车区域配电中心(2)
3.1.5 区域控制器三大功能:整车区域配电中心(3)
3.1.6 区域控制器三大功能:整车区域通信中心(1)
3.1.7 区域控制器三大功能:整车区域通信中心(2)
3.1.8 区域控制器三大功能:区域功能与驱动中心(1)
3.1.9 区域控制器三大功能:区域功能与驱动中心(2)
3.1.10 区域控制架构优势:网络节点减少、通信效率提升
3.1.11 区域控制架构优势:节约线束成本,降低重量
3.1.12 OEM主机厂区域控制器数量和功能规划(1)
3.1.13 OEM主机厂区域控制器数量和功能规划(2)
3.1.14 Tier1供应商区域控制器解决方案
3.2 多域融合计算SoC
3.2.1 多域计算SoC是下一步芯片厂商重点发力方向
3.2.2 芯片厂商多域计算SoC产品解决方案(1)
3.2.3 芯片厂商多域计算SoC产品解决方案(2)
3.2.4 芯驰科技多域计算方案:中央计算架构SCCA 1.0(1)
3.2.5 芯驰科技多域计算方案:中央计算架构SCCA 1.0(2)
3.2.6 恩智浦多域计算方案:S32G高性能网关计算芯片
3.2.7 地平线+映驰科技多域计算方案:高性能计算群XCG Gen1
3.2.8 映驰科技多域计算方案:EMOS高性能计算平台
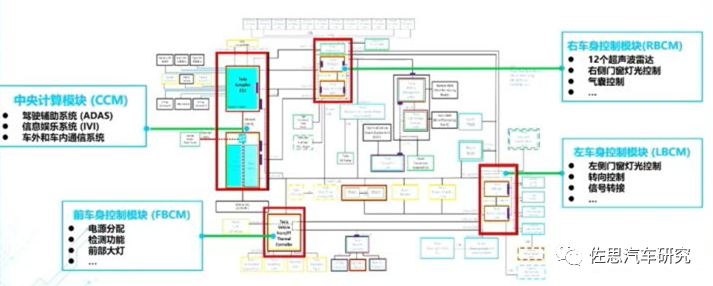
3.2.9 特斯拉多域计算方案:CCM中央计算模块
3.3 多域计算软件架构
3.3.1 软件架构变革促进软硬件解耦
3.3.2 SOA软件架构:变化趋势
3.3.3 SOA软件架构:技术特点
3.3.4 SOA软件架构:软件平台优势
3.3.5 SOA软件架构:开放生态
3.3.6 SOA软件架构:基于Zonal EEA的实践案例
3.3.7 多域计算软件发展重点:操作系统OS
3.3.8 多域计算软件发展重点:统一的软件架构平台(以ARM SOAFEE架构为例)
3.3.9 多域计算软件发展重点:多域趋势下通过Hypervisor实现操作系统融合
3.3.10 多域计算软件平台案例:诚迈科技Fusion SOA软件平台
3.3.11 多域计算软件解决方案(1)
3.3.12 多域计算软件解决方案(2)
3.4 多域计算通信架构
3.4.1 多域计算趋势下通信架构由CAN/LIN总线向以太网发展
3.4.2 基于TSN的Zonal架构
3.4.3 整车跨域TSN协议栈:映驰科技首发量产
3.4.4 OEM主机厂通信架构升级:以太网+高速网关服务器
04
国内Tier1多域计算和区控制器技术布局
4.1 东软睿驰
4.1.1 东软睿驰公司简介
4.1.2 东软睿驰产品矩阵
4.1.3 东软睿驰第四代自动驾驶域控制器
4.1.4 东软睿驰通用域控制器
4.1.5 东软睿驰商用车ADAS域控制器
4.1.6 东软睿驰下一代汽车“操作系统”——汽车基础软件平台NeuSAR
4.1.7 东软睿驰域控制器软件开发平台NeuSAR DS
4.1.8 东软睿驰基础软件:NeuSAR获得功能安全ASIL-D级证书
4.2 知行科技
4.2.1 知行科技公司简介
4.2.2 知行科技全栈自研能力
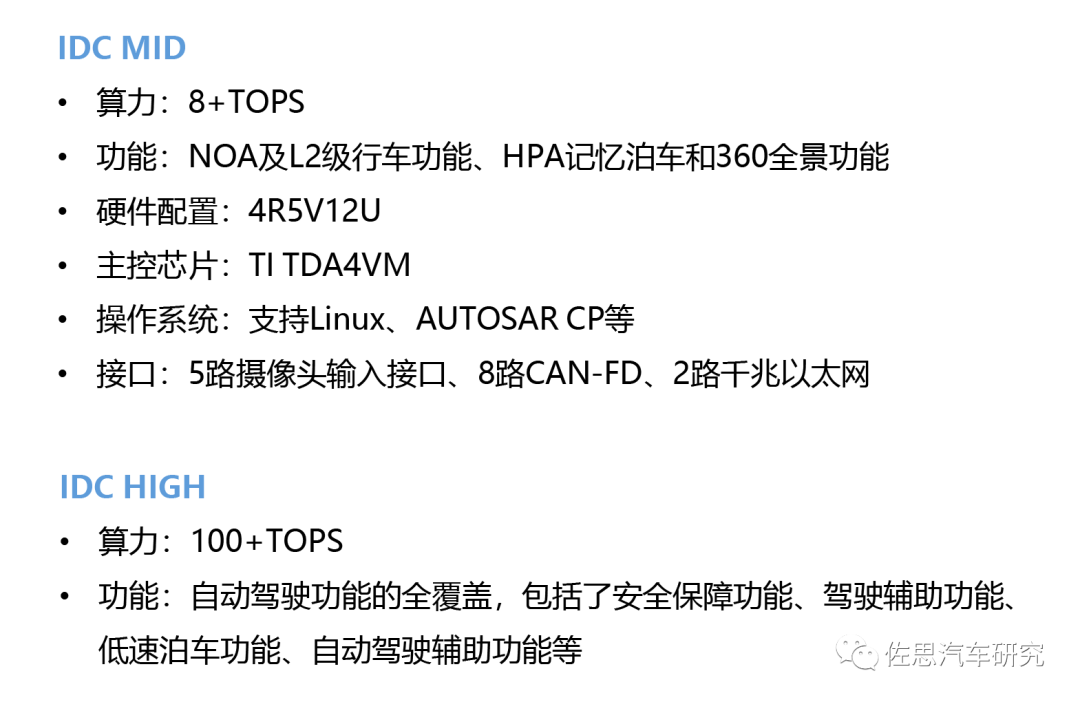
4.2.3 知行科技行泊一体智能驾驶域控制器IDC(1)
4.2.4 知行科技行泊一体智能驾驶域控制器IDC(2)
4.2.5 知行科技数据闭环系统
4.3 德赛西威
4.3.1 德赛西威多域融合方案:中央计算平台
4.3.2 德赛西威Aurora智能计算平台
4.3.3 德赛西威Aurora智能计算平台:主要特点
4.3.4 德赛西威Aurora智能计算平台:存算一体融合
4.3.5 德赛西威Aurora智能计算平台:可拓展多板卡设计
4.4 博泰车联网
4.4.1 博泰车联网公司简介
4.4.2 博泰车联网主要客户
4.4.3 博泰车联网多域融合方案:两条腿走路
4.4.4 博泰车联网基于座舱域的多域融合路线
4.4.5 博泰车联网下一代多域融合智能座舱平台
4.5 华为
4.5.1 华为CCA架构:VCU中央计算+3-5个VIU区域控制器
4.5.2 华为CCA架构:系统框架和全栈解决方案
4.6 创时智驾
4.6.1 创时智驾公司简介
4.6.2 创时智驾技术优势
4.6.3 创时智驾核心技术(1)
4.6.4 创时智驾核心技术(2)
4.6.5 创时智驾核心技术(3)
4.6.6 创时智驾电子电气架构规划
4.6.7 创时智驾多域融合方案:舱驾合一
4.6.8 创时智驾舱驾合一域控制器
4.6.9 创时智驾基于平台的开发思路
4.6.10 创时智驾域控软件平台:MotionWise 软件平台(1)
4.6.11 创时智驾域控软件平台:MotionWise 软件平台(2)
4.6.12 创时智驾域控软件平台:MotionWise软件集成方案
4.6.13 创时智驾域控软件平台:MotionWise支持不同安全等级应用混合集成
4.6.14 创时智驾域控软件平台:MotionWise软硬件解耦
4.7 英博超算
4.7.1 英博超算公司简介
4.7.2 英博超算多域融合方案:两条腿走路
4.7.3 英博超算多域控制器:悟空二号(1)
4.7.4 英博超算多域控制器:悟空二号(2)
4.7.5 英博超算HPC车载中央计算机:悟空三号
4.8 联合汽车电子
4.8.1 联合汽车电子公司简介
4.8.2 联合汽车电子多域融合方案:HPC+Zone
4.8.3 联合汽车电子成立跨域控制业务部
4.8.4 联合汽车电子多域融合:车载计算平台
4.8.5 联合汽车电子多域融合:与地平线合作
4.8.6 联合汽车电子多域融合:与零束合作
4.8.7 联合汽车电子多域融合:区域控制器&软件平台
4.8.8 联合汽车电子扩展型域控制器平台
4.9 映驰科技
4.9.1 映驰科技公司简介
4.9.2 映驰科技多域融合方案:软件平台EMOS(1)
4.9.3 映驰科技多域融合方案:软件平台EMOS(2)
4.10 中科创达
4.10.1 中科创达公司简介
4.10.2 中科创达多域融合方案:计划2024年量产舱驾合一平台
4.10.3 中科创达融合智能泊车解决方案:多传感器融合+跨域融合
4.10.4 中科创达智能座舱TurboX Auto 4.5:舱驾合一融合计算
4.10.5 中科创达SOA中间件平台
**
**
4.11 诺博科技
4.11.1 诺博科技区域控制器:中央电子控制模块(CEM)(1)
4.11.2 诺博科技区域控制器:中央电子控制模块(CEM)(2)
4.12 经纬恒润
4.12.1 经纬恒润多域融合方案
4.12.2 经纬恒润SOA整车测试:中央计算单元+区域控制器解决方案
4.12.3 经纬恒润Zonal架构设计优化工具:引入法国RTaW-Pegase
05
海外Tier1多域计算和区控制器技术布局
5.1 博世
5.1.1 博世多域融合计算布局:成立智能驾驶与控制事业部(XC事业部)
5.1.2 博世多域融合计算布局:舱驾合一平台
5.1.3 博世多域融合计算布局:舱驾合一产品研发路线
5.1.4 博世舱驾合一:域内融控系统架构(1)
5.1.5 博世舱驾合一:域内融控系统架构(2)
5.1.6 博世舱驾合一:域内融控系统架构(3)
**
**
5.2 大陆
5.2.1 大陆多域融合计算布局:成立中国软件及系统研发中心
5.2.2 大陆多域融合计算布局:四域融合HPC
5.2.3 大陆多域融合计算布局:第一代和第二代车身HPC
5.2.4 大陆多域融合计算布局:SOA软件架构
5.2.5 大陆多域融合计算布局:HPC量产时间线
5.2.6 大陆多域融合计算布局:HPC平台构成
5.2.7 大陆多域融合计算布局:HPC业务收入预测
5.2.8 大陆多域融合计算布局:汽车边缘云CAEdge
**
**
5.3 采埃孚
5.3.1 采埃孚多域融合计算布局
5.3.2 采埃孚多域融合计算布局:采睿星
5.3.3 采埃孚多域融合计算布局:车辆运动域控制单元
5.3.4 采埃孚多域融合计算布局:中间件平台
**
**
5.4 安波福
5.4.1 安波福多域融合计算布局:SVA跨域融合架构
5.4.2 安波福SVA架构:结构特点
5.4.3 安波福SVA架构:主要优势
5.4.4 安波福SVA架构:功能安全特性
5.4.5 安波福SVA架构:发展规划
5.4.6 安波福多域融合计算布局:区域控制器PDC
5.4.7 安波福多域融合计算布局:中央车辆控制器CVC(车身域+底盘域融合)**
**
5.5 哈曼
5.5.1 哈曼多域融合计算布局:2024年推出多域混合架构
5.5.2 哈曼多域混合架构:功能域控制器+区域控制器
5.5.3 哈曼多域混合架构:系统拓扑
5.5.4 哈曼多域融合计算布局:舱驾合一
5.5.5 哈曼舱驾合一:底层硬件架构
**
**
5.6 伟世通
5.6.1 伟世通多域融合计算布局:Zonal架构和区域控制器
5.6.2 伟世通Zonal架构:Supper Core和Zone的功能分配
5.6.3 伟世通Zonal架构:开发挑战
**
**
5.7 电装
5.7.1 电装的多域融合思路 (1)
5.7.2 电装的多域融合思路(2)
5.7.3 电装引领跨域融合价值发展
06
国内车企多域计算和区域控制器技术布局
6.1 吉利汽车
6.1.1 吉利GEEA 2.0多域计算向GEEA 3.0中央计算演进
6.1.2 吉利多域计算硬件布局:芯擎SE1000 座舱SoC 和 AD1000 自动驾驶SoC
6.1.3 吉利多域计算软件布局:SOA软件服务架构
6.1.4 吉利多域计算软件布局:吉利银河OS跨域融合操作系统
6.1.5 ZEEKR EE 3.0中央计算平台:1个中央计算机搭配2个区控制器
6.1.6 ZEEKR EE 3.0中央计算平台:基于SOA软件架构的OTA解决方案
6.2 上汽
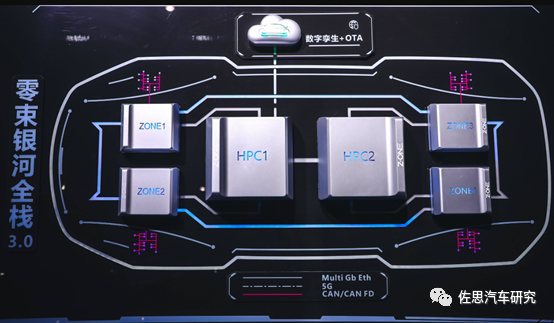
6.2.1 上汽银河全栈1.0跨域融合平台到银河全栈3.0准中央计算平台
6.2.2 上汽零束多域计算软件布局:SOA平台(1)
6.2.3 上汽零束多域计算软件布局:SOA平台(2)
6.2.4 上汽智己多域计算架构
6.2.5 零束银河全栈3.0准中央计算平台:2个中央计算单元+4个区控制器
6.2.6 零束银河全栈3.0准中央计算平台:舱驾融合HPC
6.2.7 零束银河全栈3.0准中央计算平台:舱驾融合软件架构
6.2.8 零束银河全栈3.0准中央计算平台:SOA软件生态
6.2.9 零束银河全栈3.0准中央计算平台:SOA软件一体化中央集中式平台
6.2.10 零束银河全栈3.0准中央计算平台:合作生态
**
**
6.3 广汽
6.3.1 广汽星灵架构:3个计算单元+4个区域控制器
6.3.2 广汽 GA3.0“星灵”多域计算布局:架构特点
6.3.3 广汽 GA3.0“星灵”多域计算布局:硬件平台(1)
6.3.4 广汽 GA3.0“星灵”多域计算布局:硬件平台(2)
6.3.5 广汽 GA3.0“星灵”多域计算布局:SOA软件平台
6.3.6 广汽 GA3.0“星灵”多域计算布局:用户共创平台
**
**
6.4 长城汽车
6.4.1 长城向(准)中央多域融合计算+区域控制架构演进
6.4.2 长城GEEP 4.0准中央多域计算布局:3个计算平台+3个区控制器
6.4.3 长城GEEP 4.0准中央多域计算布局:硬件平台
6.4.4 长城GEEP 4.0准中央多域计算布局:SOA软件框架(1)
6.4.5 长城GEEP 4.0准中央多域计算布局:SOA软件框架(2)
6.4.6 长城GEEP 4.0准中央多域计算布局:全栈式安全保障
6.4.7 长城GEEP 5.0中央计算平台:中央大脑(One Brain)+区控制器
**
**
6.5 一汽红旗
6.5.1 一汽红旗FEEA3.0多域计算思路
6.5.2 一汽红旗FEEA3.0多域计算布局:智控、智享、智驾三大平台
6.5.3 一汽红旗FEEA3.0多域计算布局:TSN以太网多域控制器
**
**
6.6 比亚迪
6.6.1 比亚迪“e3.0”平台介绍
6.6.2 比亚迪“e3.0”多域计算思路
6.6.3 比亚迪“e3.0”多域计算布局:集成式左右车身控制器
6.6.4 比亚迪“e3.0”多域计算布局:智能动力域(1)
6.6.5 比亚迪“e3.0”多域计算布局:智能动力域(2)
6.6.6 比亚迪“e3.0”多域计算布局:智能动力域(3)
6.6.7 比亚迪“e3.0”多域计算布局:智能动力域(4)
6.6.8 比亚迪“e3.0”多域计算布局:智能动力域(5)
6.6.9 比亚迪“e3.0”多域计算布局:智能动力域(6)
**
**
6.7 长安汽车
6.7.1长安多域融合向(准)中央计算架构演进
6.7.2 长安CIIA 2.0多域计算布局:整车控制域(1)
6.7.3 长安CIIA 2.0多域计算布局:整车控制域(2)
6.7.4 长安CIIA 2.0多域计算布局:SDA软件架构
**
**
6.8 理想汽车
6.8.1 理想多域融合计算向中央集中架构迭代
6.8.2 理想LEEA 2.0多域计算布局:L9中央域控制器(XCU)
6.8.3 理想LEEA 3.0中央集中计算布局:CCU(3个计算群)+区域控制器
6.8.4 理想LEEA 3.0中央集中计算布局:CCU内部功能架构
6.8.5 理想LEEA 3.0中央集中计算布局:区域控制器
6.8.6 理想LEEA 3.0中央集中计算布局:通过PCIe Switch和TSN Switch连接
6.8.7 理想LEEA 3.0中央集中计算布局:软件架构
6.8.8 理想LEEA 3.0中央集中计算布局:操作系统LiOS
**
**
6.9 小鹏汽车
6.9.1 小鹏汽车向多域计算+区域控制器演进
6.9.2 小鹏X-EEA 3.0:中央超算(3个计算群)+区域控制(Z-DCU)
6.9.3 小鹏X-EEA 3.0多域计算布局:中央超算平台架构
6.9.4 小鹏X-EEA 3.0多域计算布局:中央计算域和智驾域软件架构
6.9.5 小鹏X-EEA 3.0多域计算布局:三层软件架构
6.9.6 小鹏X-EEA 3.0多域计算布局:SOA软件架构
**
**
6.10 蔚来汽车
6.10.1 蔚来多域计算布局:互联中央网关LION融合车身域
6.10.2 蔚来多域计算布局:智能底盘域控制器ICC与智驾域跨域融合(1)
6.10.3 蔚来多域计算布局:智能底盘域控制器ICC与智驾域跨域融合(2)
**
**
6.11 集度汽车
6.11.1 集度核心架构JET:支持四域融合计算
6.11.2 集度多域融合计算软件布局:SOA“舱驾融合”技术
6.11.3 集度多域融合计算硬件布局:高通8295+英伟达Orin X
6.11.4 集度多域融合计算布局:底盘域与智驾域融合
**
**
6.12 哪吒汽车
6.12.1 哪吒向多域融合计算和中央计算演进
6.12.2 哪吒多域融合计算布局:智能控制平台域演进
6.13 天际汽车
6.13.1 天际汽车多域融合计算布局:动力域多域融合向车载中央计算中心演进
07
海外车企多域计算和区域控制器技术布局
7.1 特斯拉
7.1.1 特斯拉准中央计算平台:CCM中央计算模块+3个区控制器
7.1.2 特斯拉准中央计算平台:通信架构
7.1.3 特斯拉准中央计算平台:Zonal控制器图示(1)
7.1.4 特斯拉准中央计算平台:Zonal控制器图示(2)
7.1.5 特斯拉准中央计算平台:Zonal控制器功能迭代
7.1.6 特斯拉准中央计算平台:Zonal控制器架构
7.1.7 特斯拉准中央计算平台:左车身Zonal控制器功能分配
7.1.8 特斯拉准中央计算平台:右车身Zonal控制器功能分配
7.1.9 特斯拉准中央计算平台:前Zonal控制器功能分配
7.1.10 特斯拉准中央计算平台:Zonal控制板迭代
7.1.11 特斯拉准中央计算平台:SOA软件架构
**
**
7.2 沃尔沃
7.2.1 沃尔沃SPA2架构:三个计算机群VCU+区域控制器VIU
7.2.2 沃尔沃SPA2多域混合架构:系统拓扑
7.2.3 沃尔沃SPA2多域混合架构:VIU区控制器功能分配
7.2.4 沃尔沃SPA2多域混合架构:VIU区控制器系统架构
7.2.5 沃尔沃SPA2多域混合架构:硬件平台
7.2.6 沃尔沃SPA2多域混合架构:SOA软件
7.3 宝马汽车
7.3.1 宝马Zonal架构:准中央计算(2个计算群)+Zonal 区域控制器
7.3.2 宝马Zonal架构:硬件架构采用2个计算群
7.3.3 宝马Zonal架构:自动驾驶硬件架构
7.3.4 宝马Zonal架构:通信架构及SOA解决方案
7.3.5 宝马Zonal架构:车载通信网络
**
**
7.4 丰田汽车
7.4.1 丰田Zonal架构:中央大脑+跨区域控制器
7.4.2 丰田Zonal架构:Arene操作系统
**
**
7.5 大众汽车
7.5.1 大众多域计算布局:E3 1.1和E3 2.0
7.5.2 大众多域计算布局:ICAS1车辆控制域
7.5.3 大众E³ 2.0架构:CARIAD软件平台
7.5.4 大众E³ 2.0架构:VW.OS汽车操作系统
7.6 Stellantis
7.6.1 Stellantis STLA Brain准中央计算架构:HPC和Zonal控制器
7.6.2 Stellantis STLA Brain准中央计算架构:三大技术平台
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)