目录
前言
一、新建ROS工程及初始化编译
二、在Baxter的工作空间对setup.bash文件进行source
编辑
三、安装Baxter SDK
四、测试
编辑
总结
前言
Baxter simulator由ReThink Robotics公司提供,是一个合理可靠的机器人模型。仿真器和实体机器人模型都有相同的ROS接口,所以在仿真器下开发的程序都可以在相应的实体机器人上快速部署。
一、新建ROS工程及初始化编译
mkdir -p baxter_ws/src
cd ~/baxter_ws/src
catkin_init_workspace
cd ~/baxter_ws
catkin_make
二、在Baxter的工作空间对setup.bash文件进行source
source /opt/ros/noetic/setup.bash
source ~/baxter_ws/devel/setup.bash
echo "source ~baxter_ws/devel/setup.bash" >> ~/.bashrc
echo $ROS_PACKAGE_PATH
三、安装Baxter SDK
注:如果无法连接到github,可以使用:baxter: Baxter Research Robot SDK - Gitee.com https://gitee.com/hankfirst/baxter/tree/master
https://gitee.com/hankfirst/baxter/tree/master
sudo apt-get update
sudo apt-get install git-core python-argparse python3-wstool python3-vcstools python3-rosdep ros-noetic-control-msgs ros-noetic-joystick-drivers
报错

尝试使用aptitude安装还是没找到解决方案,现继续往下走。
wstool init
sudo wstool merge https://raw.githubusercontent.com/RethinkRobotics/baxter/master/baxter_sdk.rosinstall
结果拒绝链接!接着修改hosts文件,加入199.232.28.133 raw.githubusercontent.com

终于克隆成功了。 接下来构建并安装:
cd src/
catkin_make
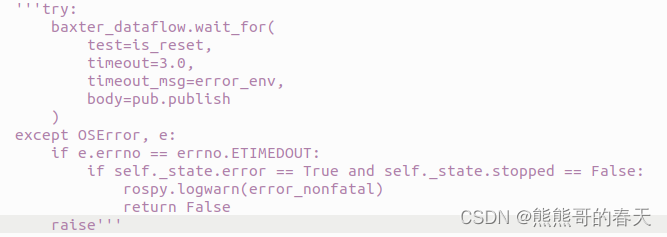
报错,我猜是python版本导致,应该是2.7才能通过编译;
File "/home/guoxiong/baxter_ws/src/baxter_interface/src/baxter_interface/robot_enable.py", line 167
except OSError, e:
^
SyntaxError: invalid syntax
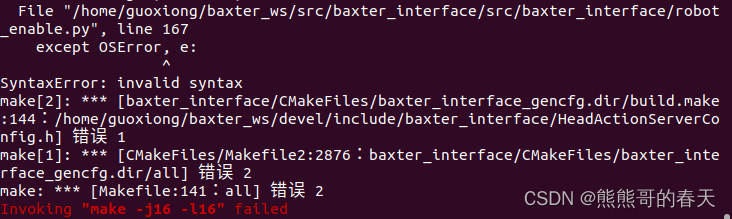
切换了python版本为2.7然后编译,并不能通过。一气之下把报错的小功能切了:
接着catkin_make install
catkin_make install
四、测试
先下载baxter.sh脚本并给权限:
wget https://github.com/RethinkRobotics/baxter/raw/master/baxter.sh
chmod u+x baxter.sh

编辑baxter.sh并保存:
sudo gedit baxter.sh

运行baxter.sh,初始化ROS环境:
. baxter.sh

查看环境:
env | grep ROS

记得在~/.bashrc添加source ~/baxter_ws/devel/setup.bash
总结
本文介绍了ubuntu20.04安装baxter的开发环境的具体过程,每个人遇到的问题可能都不一样,仔细定位到自己ERROR,避免盲目网上查询入坑。
参考:
UBuntu20.04+ROS noetic安装Baxter SDK软件_五色梦的博客-CSDN博客_baxter sdkUBuntu20.04+ROS noetic安装Baxter SDK软件1.创建ROS的工作环境$ mkdir -p baxter_ws/src//创建baxter_ws的文件目录$ cd ~/baxter_ws/src$ catkin_init_workspace$cd ~/baxter_ws//构建并安装Baxter工作空间$catkin_make2.在Baxter的工作空间对setup.bash文件进行source,将此工作空间置于工作站ROS环境上层$ source /opt/ro https://blog.csdn.net/weixin_43731206/article/details/114584436
https://blog.csdn.net/weixin_43731206/article/details/114584436
Workstation Setup - sdk-wiki https://sdk.rethinkrobotics.com/wiki/Workstation_Setup
https://sdk.rethinkrobotics.com/wiki/Workstation_Setup
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)