本文以Windows连接Ubuntu子系统(WSL)为例来介绍VSCode的远程开发流程。
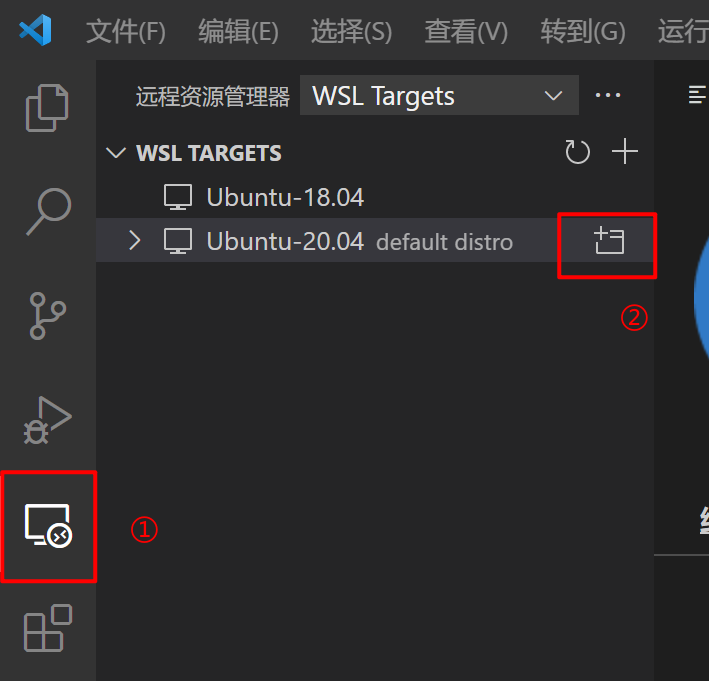
首先在VSCode中安装Remote - WSL插件,重启VSCode,如下图所示,连接WSL
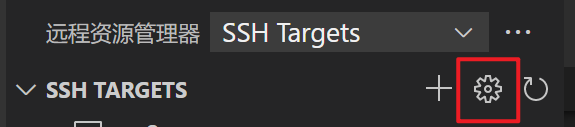
如果是其他远程,则要安装Remote-SSH插件,同时需要配置ssh的config文件
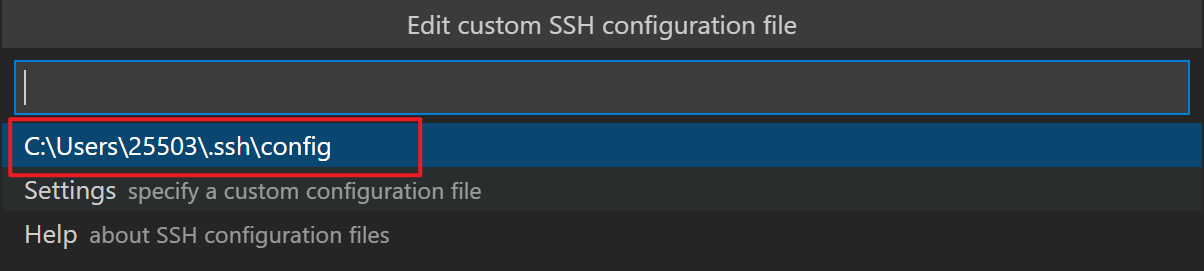
在config文件中添加远程配置,如下,其中要配置的HostName和User,分别是远端的IP和用户名
Host xxxx
HostName 192.168.3.120
User pi
ForwardAgent yes
保存后就可按照WSL的方式进行连接,但是连接过程中需要输入远端密码,其余操作与WSL基本一致
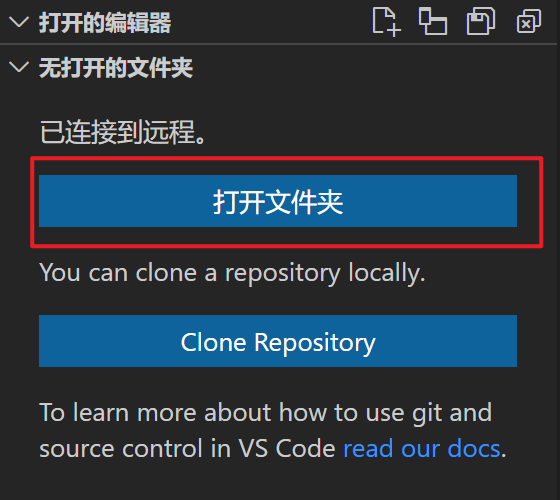
如下图所示即为连接成功,这时工作区里没有任何内容,可以选择打开一个文件夹作为工作区
此时会弹出对话框,找到要打开的文件夹,点击确定即可(注:图中/mnt/c即表示Windows中的C盘路径)

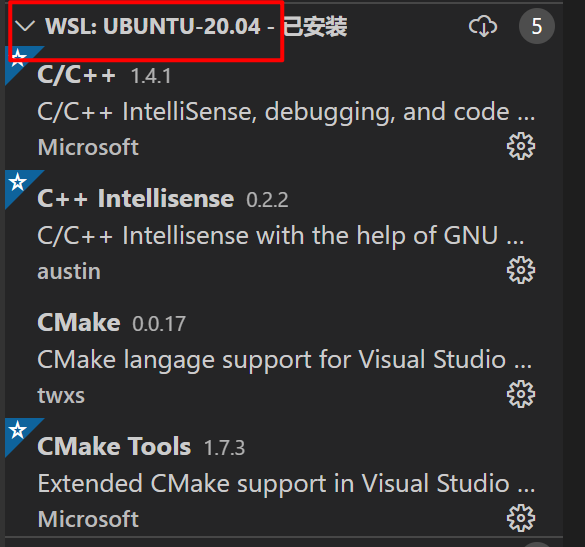
下面用一个简单的CMake工程作为示例,演示VSCode的开发流程。在开始之前,要继续给VSCode安装一些插件,如图
首先在src路径下新建一个helloworld.cpp文件,内容如下:
#include <iostream>
#include "helloworld.h"
int main(int argc, char** argv){
World world;
world.hello();
}
然后在include路径下新建一个helloworld.h文件,内容如下:
#ifndef HELLO_WORLD_
#define HELLO_WORLD_
#include "iostream"
class World{
public:
void hello(){
std::cout << "hello world!" << std::endl;
}
};
#endif
接下来新建CMakeLists.txt文件,内容如下:
cmake_minimum_required(VERSION 3.16)
project(HelloWorld)
add_compile_options(-std=c++11)
include_directories(${PROJECT_SOURCE_DIR}/include)
add_executable(helloworld src/helloworld.cpp)
重启VSCode,可以看到底部工具栏出现了一些新内容,如下,注:选择编译器这项初始是No Kit Selected状态

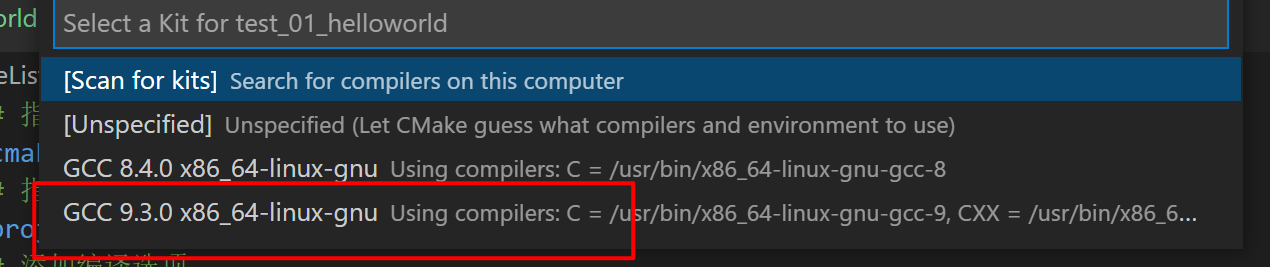
然后选择编译器,弹出对话框后,选择GCC 9.3.0(当然也可以选图中的另一个编译器)
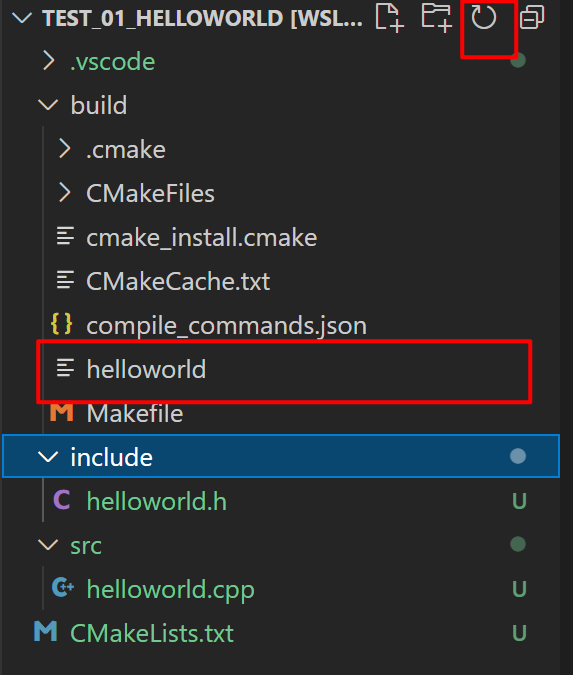
继续点击底部工具栏中的Build即可进行编译,编译完成后,点击左侧资源管理器右上角的刷新按键,就可以看到编译生成的可执行文件helloworld
点击运行,结果如下:

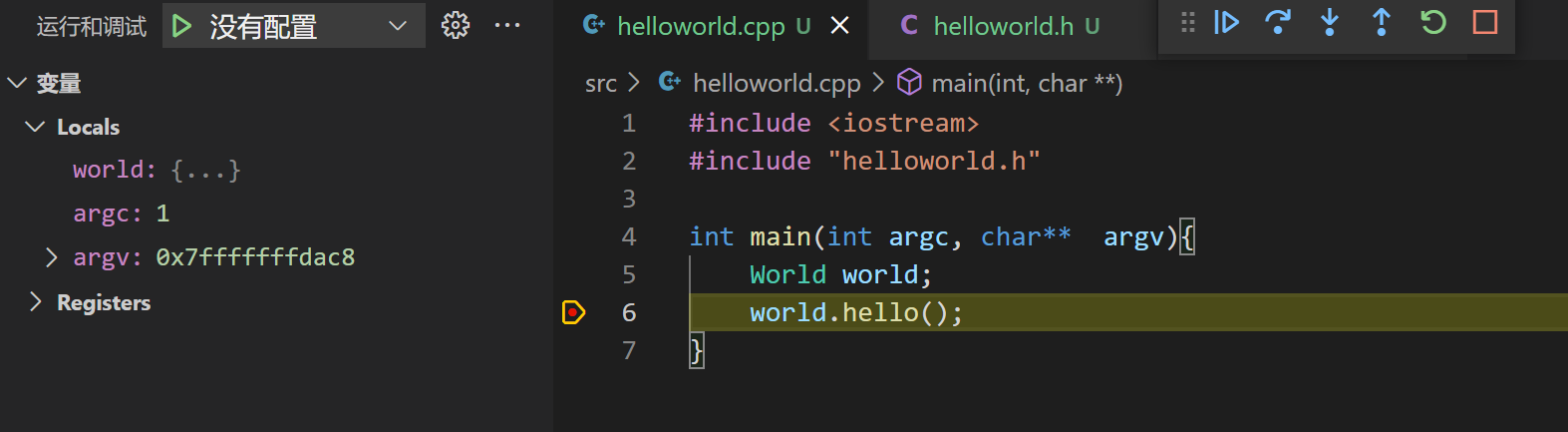
在程序中打端点,然后点击调试,就可以进行断点调试。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)