1.ROS通信方式
ROS有四种通信方式:
- Topic 主题
- Service 服务
- Parameter Service 参数服务器
- Actionlib 动作库
其中,topic是最常用的一种。
2.Topic
Topic: ROS中的异步通信方式,Node间通过publish-subscribe机制通信

topic有严格的格式要求,叫做 Message: topic内容的数据类型,定义在 .msg文件中。
基本msg包括:
- bool,int8,int16,int32,int64(以及uint)
- float32,float64,string
- time,duration,header
- 可变长数组array[],固定长度数组array[C]
3.Topic and msg实践
(1) Topic的C++实现
cd catkin_ws/src/
catkin_create_pkg strings_processer roscpp std_msgs message_generation message_runtime
touch strings.msg
cd src
touch publisher.cpp
touch subscriber.cpp
add_executable(publisher src/publisher.cpp)
add_dependencies(publisher ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(publisher ${catkin_LIBRARIES})
add_executable(subscriber src/subscriber.cpp)
add_dependencies(subscriber ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(subscriber ${catkin_LIBRARIES})
编写publisher.cpp代码
#include<ros/ros.h>
#include<strings_processer/strings.h>
int main(int argc, char *argv[])
{
strings_processer::strings msg;
msg.num=0;
msg.strings="num:";
ros::init(argc, argv, "publisher");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<strings_processer::strings>("strings_info",1);
ros::Rate loop_rate(1.0);
while (ros::ok())
{
msg.num += 1;
ROS_INFO("We subscribed this: %s %d",msg.strings.c_str(),msg.num);
pub.publish(msg);
loop_rate.sleep();
}
return 0;
}
编写subscriber.cpp代码
#include<ros/ros.h>
#include<strings_processer/strings.h>
void publisherCallback(const strings_processer::strings &msg)
{
ROS_INFO("We subscribed this: %s %d",msg.strings.c_str(),msg.num);
}
int main(int argc, char *argv[])
{
ros::init(argc, argv, "subscriber");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe("strings_info",1,publisherCallback);
ros::spin();
return 0;
}
运行:
cd ~/catkin_ws
catkin_make
roscore
rosrun strings_processer publisher
rosrun strings_processer subscriber
rosrun rqt_graph rqt_graph
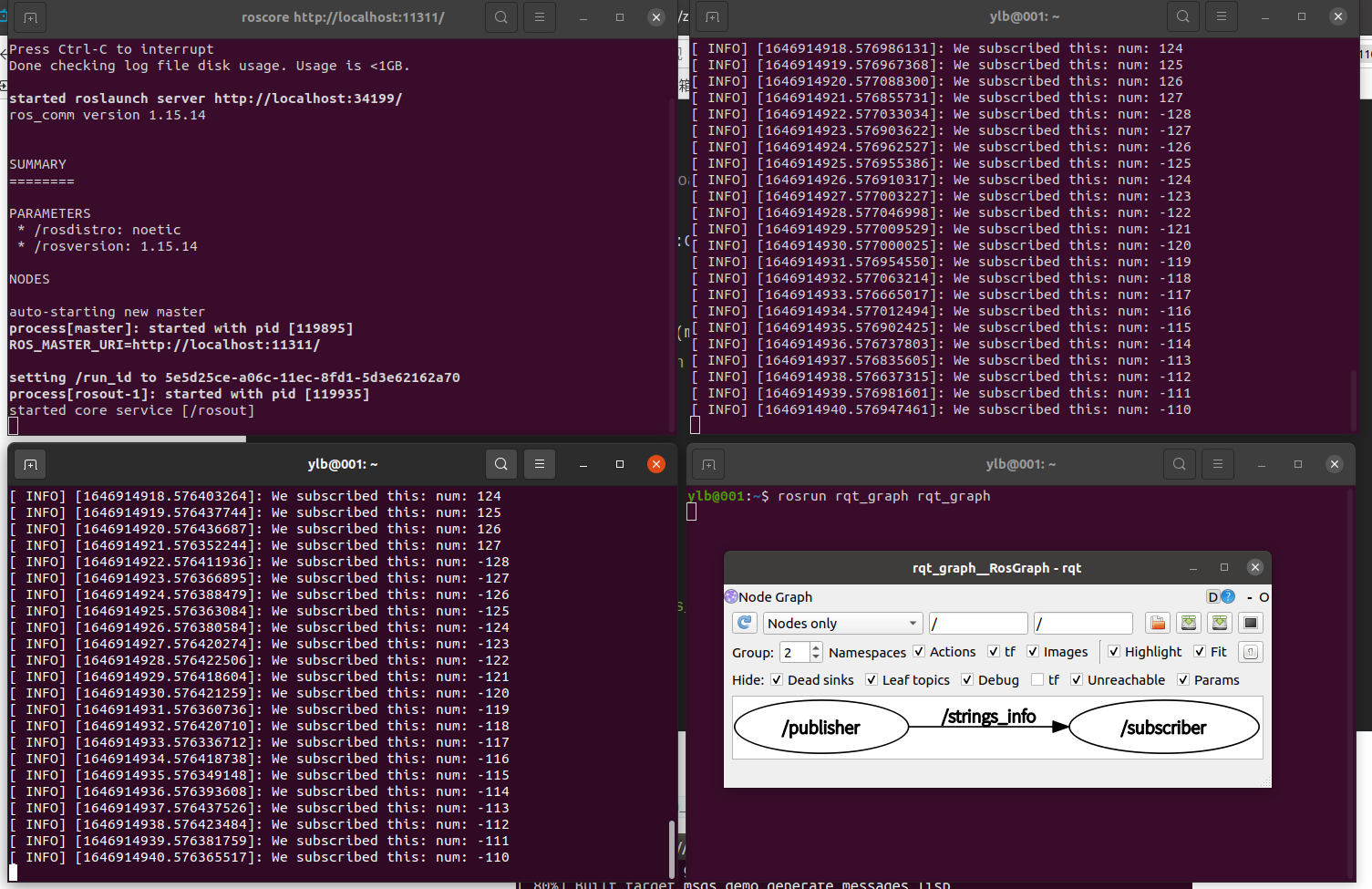 注: 随着ros框架越来越复杂,节点越来越多,再使用rosrun就太麻烦了,所以在工程中一般用roslaunch命令启动,需要编写.launch文件。
注: 随着ros框架越来越复杂,节点越来越多,再使用rosrun就太麻烦了,所以在工程中一般用roslaunch命令启动,需要编写.launch文件。
(2) Topic的Python实现
待续…
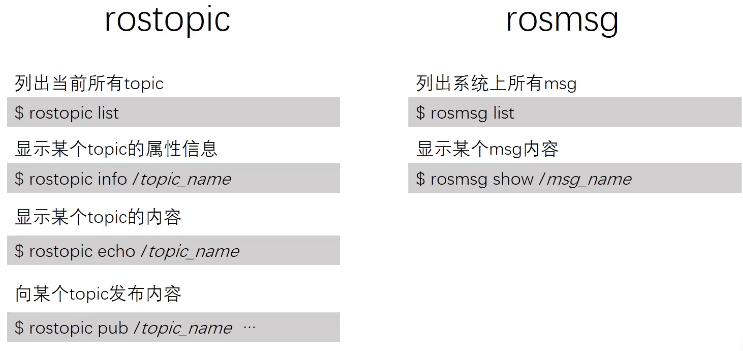
4.相关命令
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)