
来源:MEMS
随着近两年来智慧汽车、车联网等等概念的兴起,汽车自动驾驶的各种科技进展不断占据媒体版面,引起了全球的关注和各国政府的支持。对于大部分人来说, “吃着火锅唱着歌”轻轻松松地直达目的地绝对是美好的愿望,而彻底改变越来越拥堵的交通和几乎完美的安全保障也将解决政府的心头大患。
在这个大背景下,美国SAE(SAE International,Society of Automotive Engineers 国际自动机工程师学会,原译为美国汽车工程师学会)早在2014年就发布了一版自动驾驶分级标准,将自动驾驶技术分为了L0~L5共六个等级。作为连续10年全球最大的汽车生产国和第一大新车市场,近日,我国工信部正式发布《汽车驾驶自动化分级》推荐性国家标准报批公示,意味着中国将建立自己的自动驾驶汽车分级标准,可谓为未来各类自动驾驶汽车的量产注入了一针强心剂。

《汽车驾驶自动化分级》推荐性国家标准报批公式
如何提升未来的车辆自主认知能力?
车辆的智能化程度通常用自动驾驶级别来表示。L1和L2主要是预警系统,而L3或更高级别的车辆被授权控制以避免事故。随着车辆发展到L5,方向盘将被取消,车辆完全自动驾驶。
为了确保自动驾驶车辆的安全,必须充分探测当前和历史状态、环境特性以及车辆自身状态(位置、速度、轨迹和机械状况)
在最初的几代系统中,随着车辆开始具备L2功能,各个传感器系统独立工作。这些预警系统误报率较高,带来了不少麻烦,因此经常被关闭。为了实现具有认知能力的全自动驾驶车辆,传感器的数量将显著增加。此外,性能和响应速度也必须大幅提升。

自动驾驶等级和传感器要求
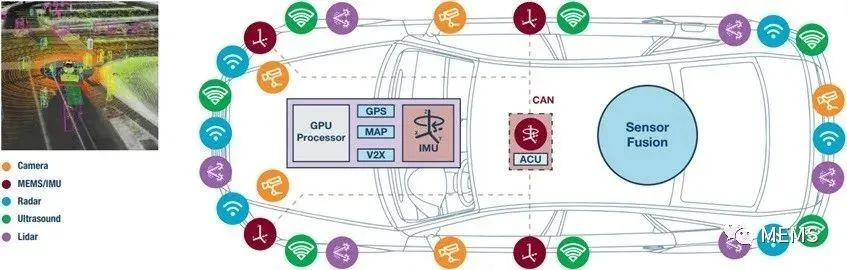
将更多传感器安装在车辆上后,还可以更好地监控和分析当前机械状况,如胎压、重量变化(例如,负载和无负载、一名乘客或五名乘客),以及可能影响制动和操控的其他磨损因素。有了更多的外部传感方式,车辆可以更充分地感知其行驶状况和周围环境。这些数据经过编译、分析和融合,使车辆能够利用这些数据对其行驶环境作出预判。这使车辆能够成为一台有学习能力的机器,有望做出比人类更好、更安全的决策。
可以说,雷达、激光雷达、惯性MEMS/IMU、摄像头和超声传感器等不同子系统组合,为成功实现自动驾驶和未来高度安全和可靠的高级驾驶员辅助系统构建了框架。而其中半导体企业发挥了关键作用,以高性能模拟技术提供商ADI为例,其25年来一直是交通运输市场和汽车系统技术领域高性能感知系统的开拓者之一,凭借其创新的传感器融合概念,为自动驾驶技术的演进提供高性能和全方位的传感解决方案。
实现自动驾驶,这几种典型传感器不可或缺
成像雷达是指多个毫米波雷达级联在一起,作为一个单元同步运行,特性通常是具备较高的角分辨率。传统24GHz/77GHz双方案通过半导体工艺技术来看,主流的芯片工艺是GaAs;现在的发展方向,是通过SiGe技术来降低成本,增强可集成度的特性。SiGe也能更好地与传统硅工艺技术做整合,有更多的数字电路能够集成到这样的芯片上。

ADI高性能成像雷达方案
未来的发展方向,77GHz或79GHz更高频率将基于硅技术从而实现更高的集成度。而现在工艺革新CMOS技术已经非常完善,让这种做法成为了可能。以ADI推出的创新型高度集成式28nm CMOS RADAR解决方案为例,其优势主要包括超快速线性调频以支持很高的模糊速度区间,低相位噪声特性允许在较大物体存在时仍能看到较小的目标物,基于CMOS技术提供高输出功率和低回损噪声系数,并且能够级联多达4个此类芯片,无需添加额外硬件就能创造超高的角分辨率图像。
ADI在CES上展出的CMOS RADAR解决方案
光有成像雷达当然不够。譬如在行人比较多的时候,自动驾驶车辆往往寸步难行。这时如果有一个LIDAR激光雷达,就可以把障碍物区分出来,车辆就可以选择继续行驶还是需要做一些避让。

ADI的高性能固态激光雷达方案
对于汽车来说,激光雷达最好是固态的激光雷达。所谓的固态即没有旋转部件,完全通过半导体的方案来制造不同的探测角度。这对于面对抵抗震动等环境的稳定性会更好,也是ADI注重的一个发展方向(ADI曾成功收购一家领先的固态激光波束转向技术企业)。
而在中短距离上,ADI则会提供ToF摄像头技术,即所谓的景深摄像头,其背后也是激光技术,会有主动光源,按照主动光源反射的时间来计算出障碍物景深信息。以ADI开发的AD-96TOF1-EBZ深度感知硬件平台为例,该解决方案能够实现非常小巧和低功耗的特点,测量长达6米的深度,并具有出色的室外和室内性能以及VGA分辨率。

AD-96TOF1-EBZ深度感知硬件平台
此外,惯性导航MEMS方案在自动驾驶方面同样是非常重要的。这类方案应用于GPS信号不佳,比如隧道这种可能长时间没有GPS信号的场景,这种场景下还是会需要相应的导航信息,惯性导航此时作为补充用于描摹行驶轨迹。这种导航信息就需要来自惯性导航的芯片持续给基于车的转向或者车的加速度、减速度,来知道车的具体位置。
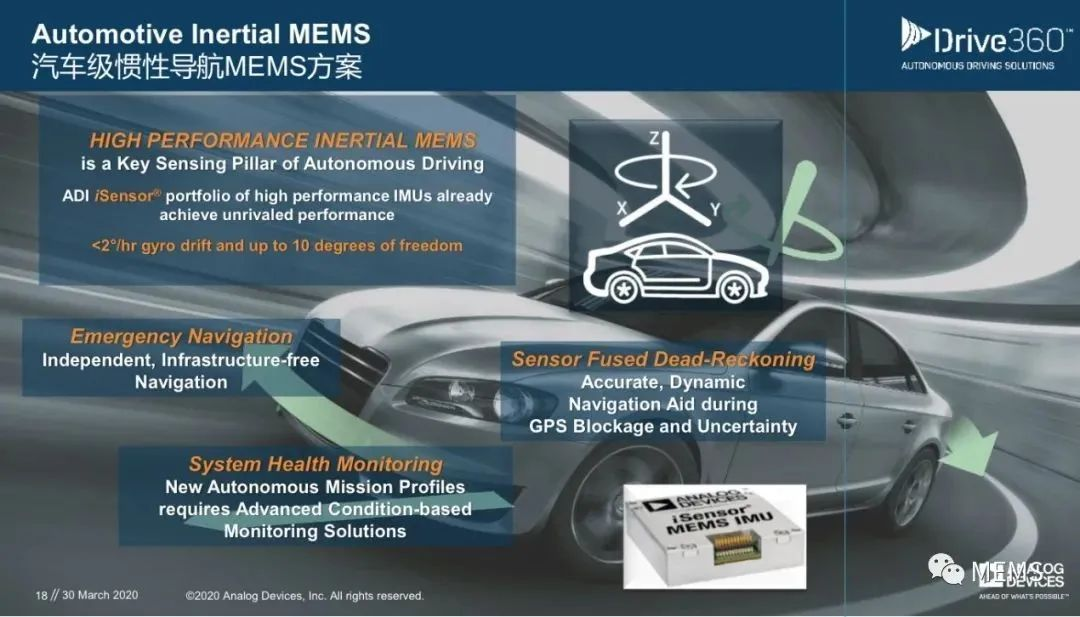
ADI的汽车级惯性导航MEMS方案
在这方面,ADI惯性导航相应的芯片是基于原来在民航飞行器中的很多经验,进而转化成汽车应用的,与传统地从手机消费类提升到汽车应用的方案不同,可靠度和精度都会更高。目前来看,哪怕是长里程(超过十公里)的行驶过程中,也能通过惯导相应的算法和技术把车的位置信息更新在车道里,给到基于高清地图的自动驾驶场景下惯导位置的导航支持。

ADI在live worx19上展示的惯性导航方案
ADI在live worx19上展示了一款精密惯性MEMS自主导航和监控方案,其使用的ADIS16495 6自由度惯性测量单元是一款高精度战术级和近战术级惯性测量单元。它由惯性传感器组成,包括3个线性加速轴,3个额定输出轴,以及一个陀螺仪,其可以根据现场信息以及车辆自主信息来确定车辆本身的行驶轨迹(哪怕是当车辆的其他传感器出现故障时,依然不影响车辆导航)。
总结
传感器的重要性对于自动驾驶的发展已经不言而喻,然而跟传感技术一样重要的则是它们的可靠性。如果传感器本身不可靠,输出的信号没有被准确捕获以作为高精度数据提供给上游,那么这些关键的传感器将变得毫无意义。ADI公司围绕惯性导航、高性能雷达和激光雷达等领域长达数十年的深厚积累可以使数据质量得到可靠保证,力求各种传感器融合方法和人工智能算法做出最佳响应,从而加快我们迈向自动驾驶的步伐。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”

