1.缺少模型库
可以在github上下载模型库,但是速度极慢,因为服务器在国外。
此处提供快速下载方法,通过码云快速git clone
cd ~/.gazebo/
git clone https://gitee.com/dva7777/gazebo_models.git
mv gazebo_models/ ./models
这时就加载了模型库,可以打开gazebo自带的模型,如果打开自己创建的模型时gazebo黑屏或崩溃,请继续尝试以下方法解决。

2.设置环境变量
echo "export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc
如果设置环境变量后,仍然出现黑屏或崩溃的情况,只能尝试最后一种方法,但会损失部分性能。
3.关闭图形加速
1.关闭虚拟机
2.编辑虚拟机设置
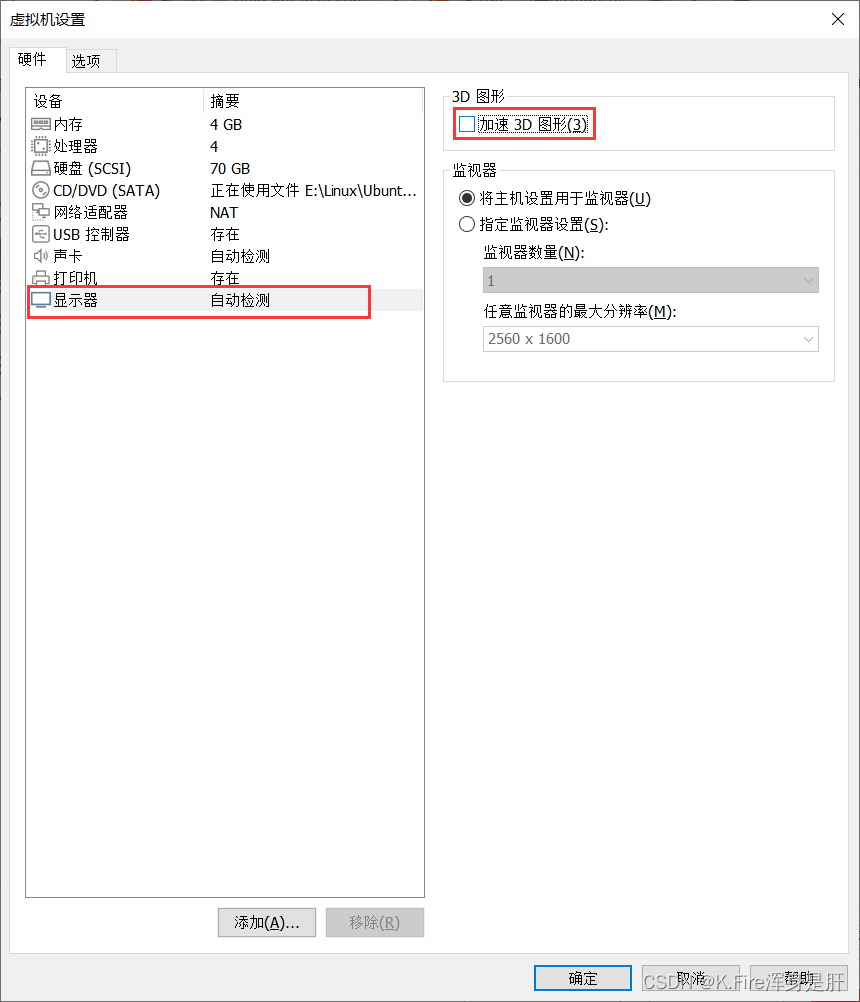
3.点击显示器,取消勾选“加速3D图形”
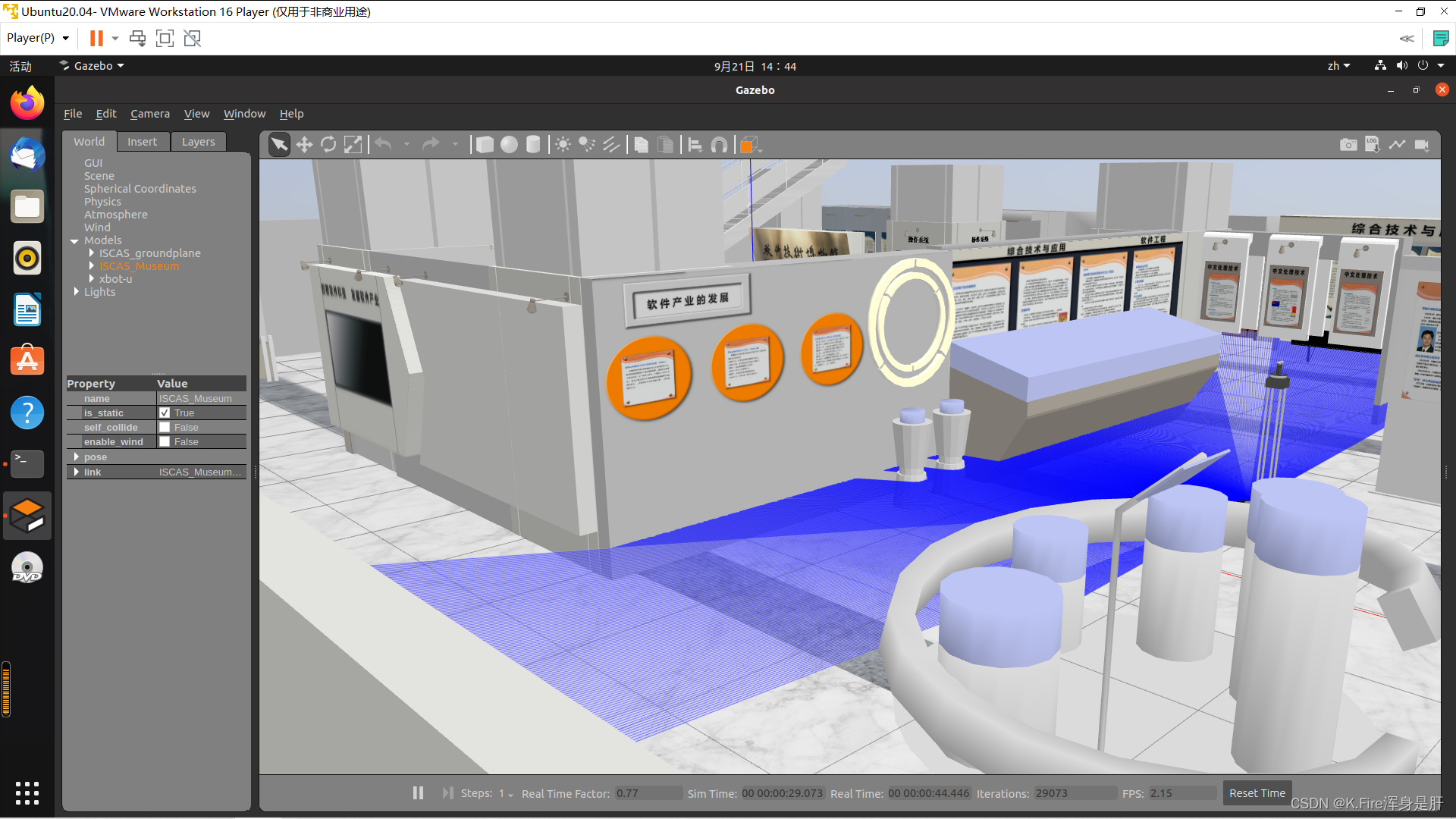
到这里不出意外应该就可以成功打开gazebo和自己创建的模型了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)