实验说明:本实验主要利用freeRTOS创建多任务实现温湿度检测与点亮LED,并在串口上输出相应温湿度和LED亮灭情况;
一.实验用材
1.DHT11温湿度传感器模块

2.stm32f103c8t6最小系统板

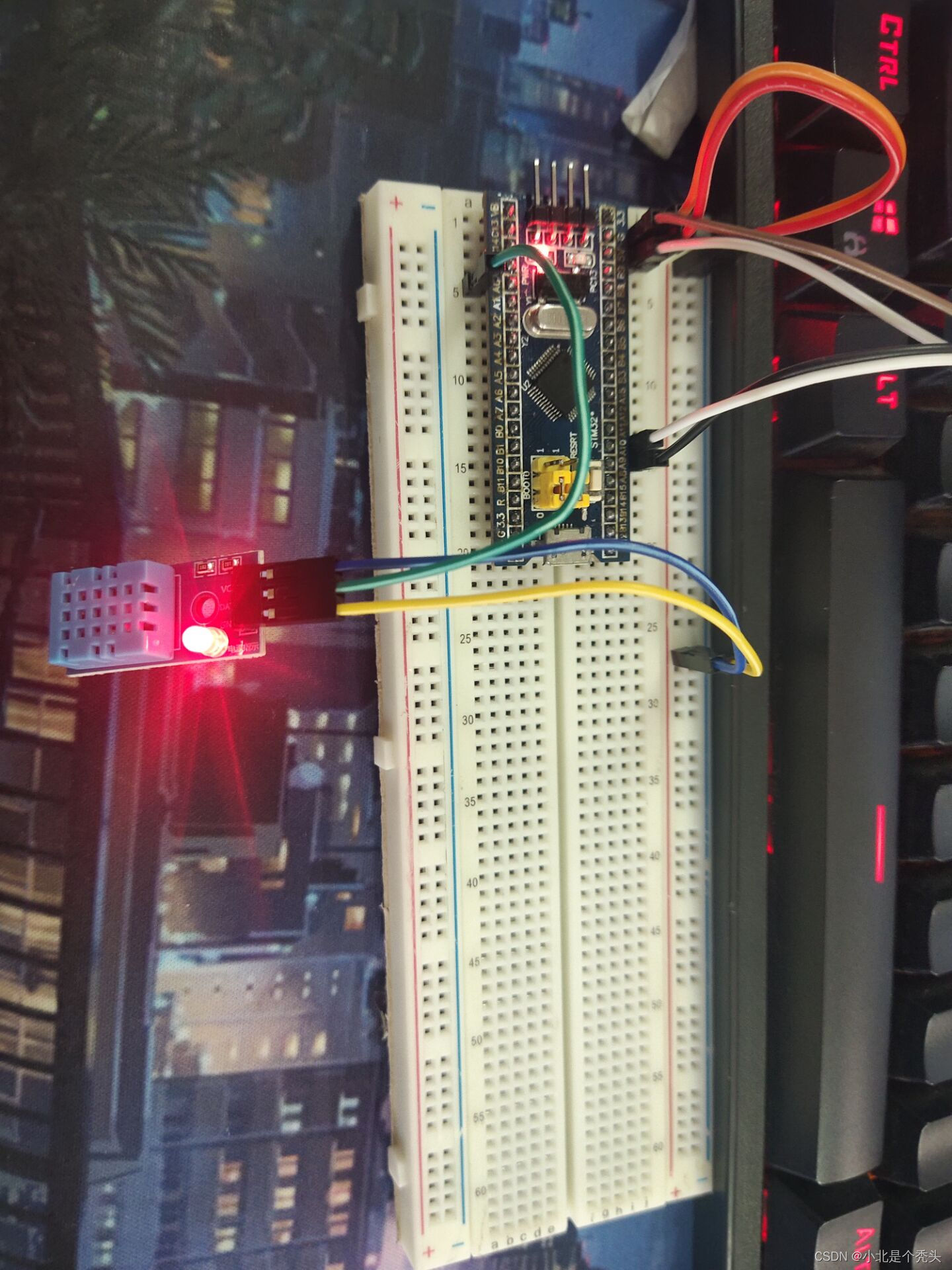
二.实验现象

三.实验主要代码
main.c
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "usart.h"
#include "dht11.h"
#include "sys.h"
#include "delay.h"
/* 创建任务句柄 */
static TaskHandle_t AppTaskCreate_Handle;
static TaskHandle_t LED1_Task_Handle;
static TaskHandle_t LED2_Task_Handle;
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED1_Task(void* pvParameters);/* LED1_Task任务实现 */
static void LED2_Task(void* pvParameters);/* LED2_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("FreeRTOS-动态创建多任务实验!\r\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
{
vTaskStartScheduler(); /* 启动任务,开启调度 */
}
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED1_Task, /* 任务入口函数 */
(const char* )"LED1_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED1_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED1_Task任务成功!\r\n");
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED2_Task, /* 任务入口函数 */
(const char* )"LED2_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&LED2_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED2_Task任务成功!\r\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED1_Task(void* parameter)
{
while (1)
{
LED1_ON;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_ON\r\n");
LED1_OFF;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_OFF\r\n");
}
}
static void LED2_Task(void* parameter)
{
u8 temp,humi;
while(DHT11_Init())
{
printf("传感器设置错误\r\n");
LED2_TOGGLE;
vTaskDelay(500);
}
while(1)
{
LED2_TOGGLE;
DHT11_Read_Data(&temp,&humi);
printf("temp:%d humi:%d \n",temp,humi);
printf("..................\n");
vTaskDelay(500);
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
uart_init(115200);
delay_init();
}
/********************************END OF FILE****************************/
dht11.c
#include "dht11.h"
#include "delay.h"
//复位DHT11
void DHT11_Rst(void)
{
DHT11_IO_OUT(); //SET OUTPUT
DHT11_DQ_OUT=0; //拉低DQ
delay_ms(20); //拉低至少18ms
DHT11_DQ_OUT=1; //DQ=1
delay_us(30); //主机拉高20~40us
}
//等待DHT11的回应
//返回1:未检测到DHT11的存在
//返回0:存在
u8 DHT11_Check(void)
{
u8 retry=0;
DHT11_IO_IN();//SET INPUT
while (DHT11_DQ_IN&&retry<100)//DHT11会拉低40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
else retry=0;
while (!DHT11_DQ_IN&&retry<100)//DHT11拉低后会再次拉高40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
return 0;
}
//从DHT11读取一个位
//返回值:1/0
u8 DHT11_Read_Bit(void)
{
u8 retry=0;
while(DHT11_DQ_IN&&retry<100)//等待变为低电平
{
retry++;
delay_us(1);
}
retry=0;
while(!DHT11_DQ_IN&&retry<100)//等待变高电平
{
retry++;
delay_us(1);
}
delay_us(40);//等待40us
if(DHT11_DQ_IN)return 1;
else return 0;
}
//从DHT11读取一个字节
//返回值:读到的数据
u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
//从DHT11读取一次数据
//temp:温度值(范围:0~50°)
//humi:湿度值(范围:20%~90%)
//返回值:0,正常;1,读取失败
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==0)
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0];
*temp=buf[2];
}
}else return 1;
return 0;
}
//初始化DHT11的IO口 DQ 同时检测DHT11的存在
//返回1:不存在
//返回0:存在
u8 DHT11_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PG端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PG11端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化IO口
GPIO_SetBits(GPIOA,GPIO_Pin_0); //PG11 输出高
DHT11_Rst(); //复位DHT11
return DHT11_Check();//等待DHT11的回应
}
dht11.h
#ifndef __DHT11_H
#define __DHT11_H
#include "sys.h"
//IO方向设置
#define DHT11_IO_IN() {GPIOA->CRL&=0XFFFFFFF0;GPIOA->CRL|=8<<0;}
#define DHT11_IO_OUT() {GPIOA->CRL&=0XFFFFFFF0;GPIOA->CRL|=3<<0;}
IO操作函数
#define DHT11_DQ_OUT PAout(0) //数据端口 PA0
#define DHT11_DQ_IN PAin(0) //数据端口 PA0
u8 DHT11_Init(void);//初始化DHT11
u8 DHT11_Read_Data(u8 *temp,u8 *humi);//读取温湿度
u8 DHT11_Read_Byte(void);//读出一个字节
u8 DHT11_Read_Bit(void);//读出一个位
u8 DHT11_Check(void);//检测是否存在DHT11
void DHT11_Rst(void);//复位DHT11
#endif
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)