最近写了个自认为不错的基于linux socket can程序,主要功能:
- 程序具备全部CAN功能,包括CAN标准帧/扩展帧接收与发送、CAN总线错误判断、环回等功能
- 适用基于LINUX SOCKET机制实现的CAN接口,可用于嵌入式LINUX的CAN测试
- 程序采用标准LINUX命令行参数选项形式,接受用户参数
现把源码进行分享
功能介绍
SOCKET CAN工具程序 – Ver1.0 Build Nov 20 2015, COPYRIGHT (C) 2015 reille @ http://velep.com/
介绍:
本SOCKET CAN程序具备全部CAN功能,包括CAN标准帧/扩展帧接收与发送、CAN总线错误判断、环回等功能
适用基于LINUX SOCKET机制实现的CAN接口,可用于嵌入式LINUX中的CAN测试程序
程序采用标准LINUX命令行参数选项形式,接受用户参数
用法: ./cantool [选项]…
选项:
-p, –port=CAN接口号 指定CAN接口号,从1开始, 默认为 1(即CAN1接口)
-b, –baud=波特率 指定CAN通讯波特率,单位Kbps,默认为 250 Kbps
可用波特率:5,10,20,40,50,80,100,125,200,250,400,500,666,800,1000
-i, –frame-id=帧ID 指定CAN发送帧ID(Hex格式), 默认为1801F456
-d, –data=数据 指定CAN发送帧数据, 默认为:00 01 FF FF FF FF FF FF,字节数据间以空格隔开
-f, –freq=间隔 指定CAN帧发送间隔,单位ms, 默认为250ms, 最小值为1ms
-t, –times=次数 指定CAN帧发送次数, 默认为0次
-s, 指定CAN发送帧为标准帧, 默认为发送扩展帧
-I, 帧ID每发送一帧递增, 默认不递增
-g, 发送数据每发送一帧递增, 默认不递增
-l, 发送数据时本地环回, 默认不环回
–help 显示此帮助信息并退出
注意,以下CAN帧ID作为系统使用:
0x00000001 – TX timeout (by netdevice driver)
0x00000002 – lost arbitration / data[0]
0x00000004 – controller problems / data[1]
0x00000008 – protocol violations / data[2..3]
0x00000010 – transceiver status / data[4]
0x00000020 – received no ACK on transmission
0x00000040 – bus off
0x00000080 – bus error (may flood!)
0x00000100 – controller restarted
使用 Ctrl^C 组合键结束程序运行
部分源码
int main(int argc, char **argv)
{
S_CanFrame sendframe, recvframe;
byte *psendframe = (byte *)&sendframe;
byte *precvframe = (byte *)&recvframe;
u_canframe_data_t *psend_data = (u_canframe_data_t *)sendframe.data;
const int can_frame_len = sizeof(S_CanFrame);
pid_t pid = -1;
int status;
int ret = 0;
char buf[128] = {0};
bool carry_bit = false;// 进位标志
int segment_id;//id for shared memo
if (parse_options(argc, argv))
{
usage(); return 0;
}
if (!find_can(port))
{
sprintf(buf, "\n\t错误:CAN%d设备不存在\n\n", port + 1);
panic(buf);
return -1;
}
close_can(port);// 必须先关闭CAN,才能成功设置CAN波特率
set_bitrate(port, bitrate);// 操作CAN之前,先要设置波特率
open_can(port, bitrate);
send_socket_fd = socket_connect(port);
recv_socket_fd = socket_connect(port);
//printf("send_socket_fd = %d, recv_socket_fd = %d\n", send_socket_fd, recv_socket_fd);
if (send_socket_fd < 0 || send_socket_fd < 0)
{
disconnect(&send_socket_fd);
disconnect(&recv_socket_fd);
panic("\n\t打开socket can错误\n\n");
return -1;
}
set_can_filter();
set_can_loopback(send_socket_fd, lp);
printf_head();
memset(&sendframe, 0x00, sizeof(sendframe));
memset(&recvframe, 0x00, sizeof(recvframe));
if (extended_frame) // 指定发送帧类型:扩展帧或标准帧
{
sendframe.can_id = (send_frame_id & CAN_EFF_MASK) | CAN_EFF_FLAG;
}
else
{
sendframe.can_id = (send_frame_id & CAN_SFF_MASK);
}
sendframe.can_dlc = dlc;
memcpy(sendframe.data, send_frame_data, dlc);
segment_id = shmget(IPC_PRIVATE, sizeof(int), S_IRUSR | S_IWUSR);// allocate memo
pframeno = (int *)shmat(segment_id, NULL, 0);// attach the memo
if (pframeno == NULL)
{
panic("\n\t创建共享内存失败\n\n");
return -1;
}
*pframeno = 1;
run = true;
pid = fork();
if(pid == -1)
{
panic("\n\t创建进程失败\n\n");
return -1;
}
else if(pid == 0) // 子进程,用于发送CAN帧
{
while (run && (send_frame_times > 0))
{
ret = send_frame(send_socket_fd, (char *)&sendframe, sizeof(sendframe));
printf_frame(sendframe.can_id & CAN_EFF_MASK, sendframe.data, sendframe.can_dlc,
((sendframe.can_id & CAN_EFF_FLAG) ? true : false),
ret > 0 ? true : false,
true);
delay_ms(send_frame_freq_ms);
if (send_frame_id_inc_en)
{
sendframe.can_id++;
if (extended_frame)
{
sendframe.can_id = (sendframe.can_id & CAN_EFF_MASK) | CAN_EFF_FLAG;
}
else
{
sendframe.can_id = (sendframe.can_id & CAN_SFF_MASK);
}
}
if (send_frame_data_inc_en && dlc > 0)
{
if (dlc > 4 && psend_data->s.dl == ((__u32)0xFFFFFFFF))
{
carry_bit = true;// 发生进位
}
psend_data->s.dl++;
if (dlc <= 4)
{
if (psend_data->s.dl >= (1 << (dlc * 8)))
{
psend_data->s.dl = 0;
}
}
else if (dlc <= 8)
{
if (carry_bit)
{
psend_data->s.dh++;
if (psend_data->s.dh >= (1 << ((dlc - 4) * 8)))
{
psend_data->s.dh = 0;
}
carry_bit = false;
}
}
}
send_frame_times--;
}
exit(0);
}
else // 父进程,接收CAN帧
{
install_sig();
while (run)
{
memset(precvframe, 0x00, can_frame_len);
ret = recv_frame(recv_socket_fd, precvframe, can_frame_len, 5 * 1000);
if (ret > 0)
{
printf_frame(recvframe.can_id & CAN_EFF_MASK, recvframe.data, recvframe.can_dlc,
((recvframe.can_id & CAN_EFF_FLAG) ? true : false),
true,
false);
}
}
while(((pid = wait(&status)) == -1) && (errno == EINTR))
{
delay_ms(10);
}
}
disconnect(&send_socket_fd);
disconnect(&recv_socket_fd);
shmdt(pframeno);// detach memo
shmctl(segment_id, IPC_RMID, NULL);// remove
return 0;
}
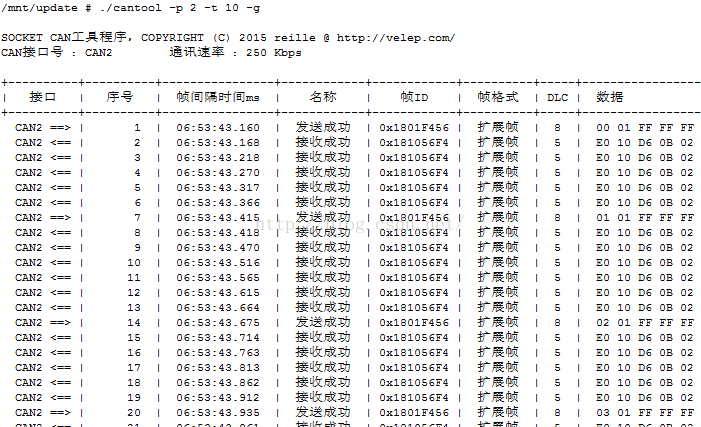
使用示例
程序源码
下载地址:linux socket can程序cantool
如果觉得好用,记得给个好评!
»
本文地址:
http://velep.com/archives/1177.html
»
文章出处:
reille博客—http://velep.com
, 如果没有特别声明,文章均为reille博客原创作品
»
郑重声明:
原创作品未经允许不得转载,如需转载请联系reille#qq.com(#换成@)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)