在gazebo环境中搭建一个尽量美观的场景、启动5台 turtlebot3 机器人 ,以话题的方式统一控制5台机器人的运动速度
(1)原有文件基础上添加多个机器人
(2)统一话题控制五个机器人(三种方式)
(3)演示视频
(4)gazebo环境中搭建场景
一、原有文件基础上添加多个机器人
1)查找该文件的路径
find -name multi_turtlebot3.launch
2)打开编辑该文件(以已有路径为例)
gedit ~/catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/launch/multi_turtlebot3.launch
3)增加两机器人(以加一个为例)
<arg name="forth_tb3" default="tb3_3"/>
<arg name="forth_tb3_x_pos" default=" 2.0"/>
<arg name="forth_tb3_y_pos" default=" -1.0"/>
<arg name="forth_tb3_z_pos" default=" 0.0"/>
<arg name="forth_tb3_yaw" default=" 0.0"/>
<group ns = "$(arg forth_tb3)">
<param name="robot_description" command="$(find xacro)/xacro --inorder $(find turtlebot3_description)/urdf/turtlebot3_$(arg model).urdf.xacro" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen">
<param name="publish_frequency" type="double" value="50.0" />
<param name="tf_prefix" value="$(arg forth_tb3)" />
</node>
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-urdf -model $(arg forth_tb3) -x $(arg forth_tb3_x_pos) -y $(arg forth_tb3_y_pos) -z $(arg forth_tb3_z_pos) -Y $(arg forth_tb3_yaw) -param robot_description" />
</group>
二、统一话题控制五个机器人(三种方式)
1、第一种:修改控制驱动插件代码
1)打开编辑该文件
gedit ~/catkin_ws/src/turtlebot3/turtlebot3_description/urdf/turtlebot3_burger.gazebo.xacro
2)在机器人配置文件控制驱动插件代码中设置全局名称**/cmd_vel**
<gazebo>
<plugin name="mecanum_controller" filename="libgazebo_ros_planar_move.so">
<commandTopic>/cmd_vel</commandTopic>
<odometryTopic>/odom</odometryTopic>
<odometryFrame>odom</odometryFrame> <leftFrontJoint>wheel_lf_joint</leftFrontJoint>
<rightFrontJoint>wheel_rf_joint</rightFrontJoint>
<leftRearJoint>wheel_lb_joint</leftRearJoint>
<rightRearJoint>wheel_rb_joint</rightRearJoint>
<odometryRate>20.0</odometryRate>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
3)在键盘控制节点中发布全局名称/cmd_vel,打开编译该文件
gedit ~/catkin_ws/src/turtlebot3/turtlebot3_teleop/nodes/turtlebot3_teleop_key
打开文件后更改为
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
4)仿真运行
##新终端
roslaunch turtlebot3_gazebo multi_turtlebot3.launch
##新终端
rosrun turtlebot3_teleop turtlebot3_teleop_key
2、第二种:键盘发布器同时发布五个话题
1)在键盘控制节点中发布全局名称/cmd_vel,打开编译该文件
gedit ~/catkin_ws/src/turtlebot3/turtlebot3_teleop/nodes/turtlebot3_teleop_key
2)修改如下
pub = rospy.Publisher('cmd_vel', Twist, queue_size=10)
pub0 = rospy.Publisher('/tb3_0/cmd_vel', Twist, queue_size=10)
pub1 = rospy.Publisher('/tb3_1/cmd_vel', Twist, queue_size=10)
pub2 = rospy.Publisher('/tb3_2/cmd_vel', Twist, queue_size=10)
pub3 = rospy.Publisher('/tb3_3/cmd_vel', Twist, queue_size=10)
pub4 = rospy.Publisher('/tb3_4/cmd_vel', Twist, queue_size=10)
pub.publish(twist)
pub0.publish(twist)
pub1.publish(twist)
pub2.publish(twist)
pub3.publish(twist)
pub4.publish(twist)
3)仿真运行
##新终端
roslaunch turtlebot3_gazebo multi_turtlebot3.launch
##新终端
rosrun turtlebot3_teleop turtlebot3_teleop_key
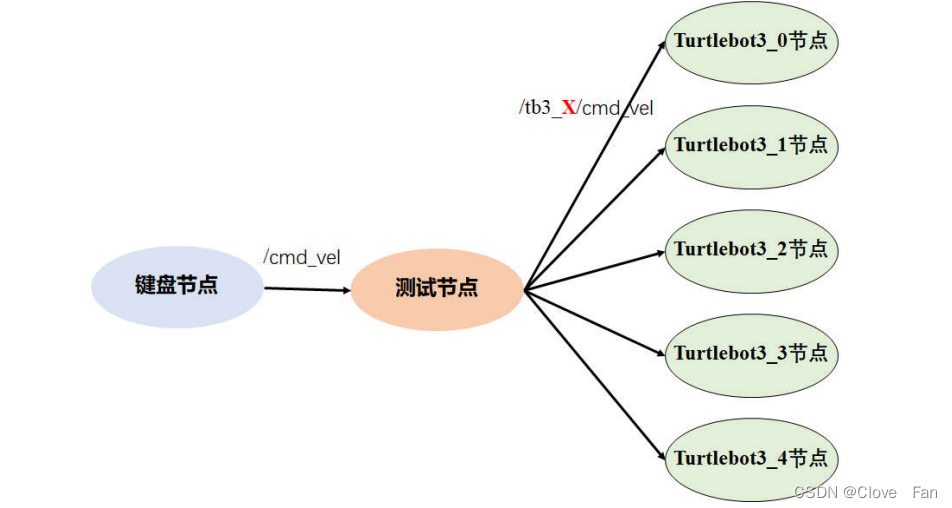
3、第三种:新建测试节点(最实用)
原理如下:
1)创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_four roscpp rospy std_msgs turtlesim
2)配置CMakeLists.txt中的编译规则
在CMakeLists.txt中第153行后添加编译规则
add_executable(four_subscriber src/four_subscriber.cpp)
target_link_libraries(four_subscriber ${catkin_LIBRARIES})
3)在src文件夹中创建cpp文件
在learing_four功能包下的src文件夹中打开终端输入以下命令
touch four_subscriber.cpp
4)编写代码
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
ros::Publisher pub0;
ros::Publisher pub1;
ros::Publisher pub2;
ros::Publisher pub3;
ros::Publisher pub4;
void poseCallback(const geometry_msgs::Twist& twist)
{
pub0.publish(twist);
pub1.publish(twist);
pub2.publish(twist);
pub3.publish(twist);
pub4.publish(twist);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "four_subscriber");
ros::NodeHandle n;
ros::Subscriber four_sub = n.subscribe("cmd_vel", 10 , poseCallback);
pub0 = n.advertise<geometry_msgs::Twist>("/tb3_0/cmd_vel", 10);
pub1 = n.advertise<geometry_msgs::Twist>("/tb3_1/cmd_vel", 10);
pub2 = n.advertise<geometry_msgs::Twist>("/tb3_2/cmd_vel", 10);
pub3 = n.advertise<geometry_msgs::Twist>("/tb3_3/cmd_vel", 10);
pub4 = n.advertise<geometry_msgs::Twist>("/tb3_4/cmd_vel", 10);
ros::spin();
return 0;
5)编译功能包
cd ~/catkin_ws
catkin_make
6)仿真运行
##新终端
roslaunch turtlebot3_gazebo multi_turtlebot3.launch
##新终端
rosrun learning_four four_subscriber
##新终端
rosrun turtlebot3_teleop turtlebot3_teleop_key
三、演示视频
图片中5个机器人正在以相同的线速度、角速度进行运动,任务完成。
四、gazebo环境中搭建场景
1)打开编辑该文件(以已有路径为例)
gedit ~/catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/launch/multi_turtlebot3.launch
2)将所创建的gazebo环境的文件夹如图所示的路径
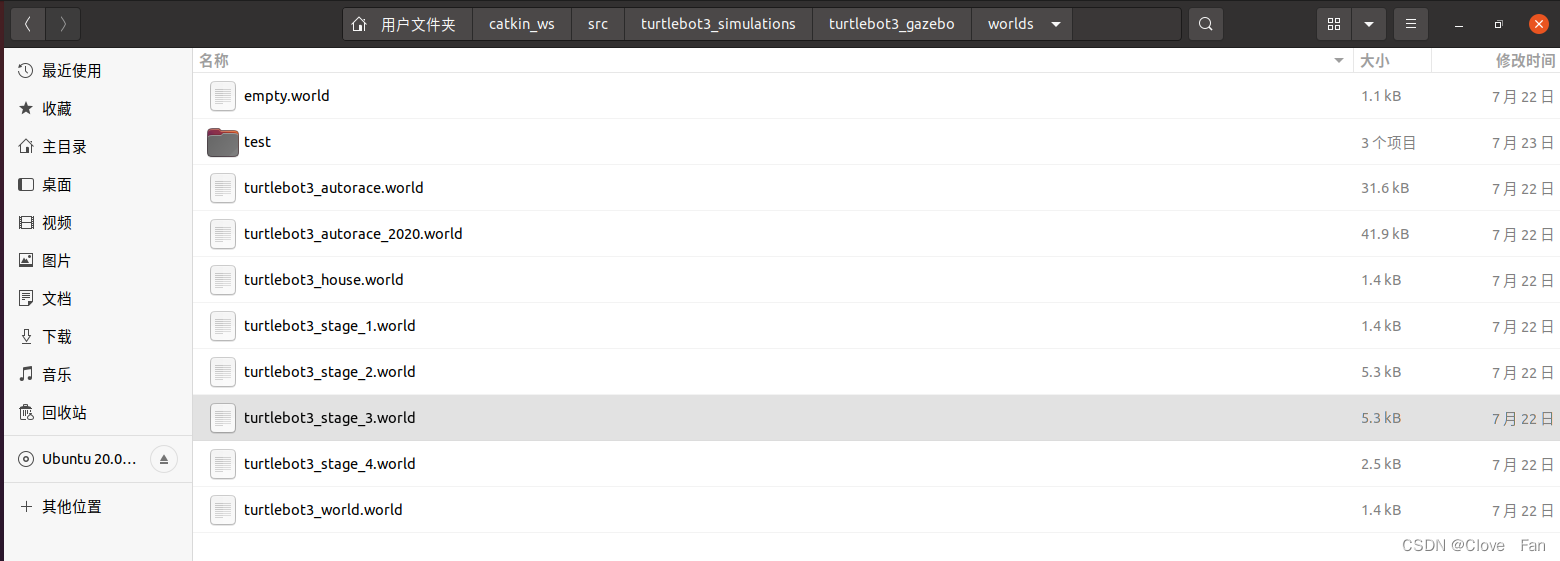
3)修改如下代码中第二行的world名称,即完成gazebo环境中的场景搭建
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/test/test.world"/>
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
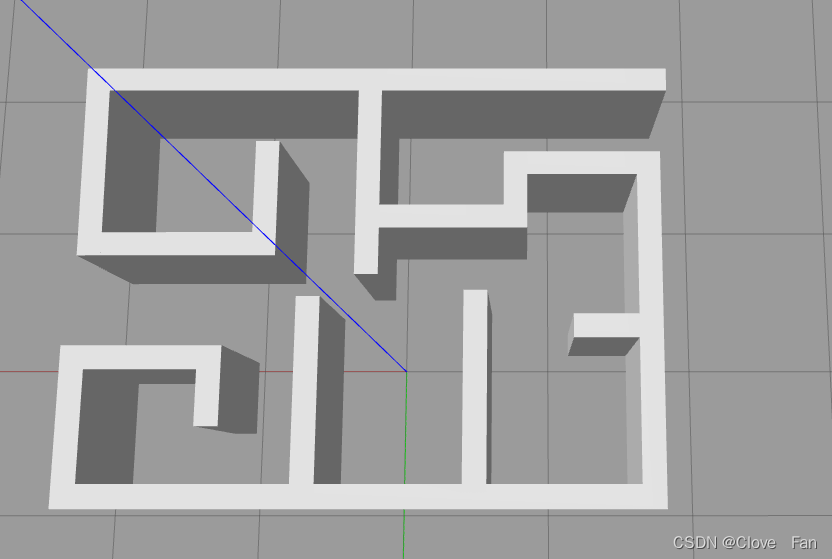
4)效果如图
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)