1. 前言
TSN是时间敏感网络(Time-Sensitive Network)的英文缩写,是IEEE 802.1 TSN工作组开发的一系列数据链路层协议规范的统称,用于指导和开发低延迟、低抖动,并具有传输时间确定性的以太网局域网,是传统以太网在汽车等特定应用环境下的增强功能实现。
早期的以太网采用的交换机主要使用半双工模式,传输带宽为100M,传输延时为5ms,单根线路的最大长度为100m。紧接着,在千兆以太网和全双工传输技术的快速发展中,局域网中基本普及了千兆交换机,默认情况下所有端口处于一个广播域,所有数据包的交换通过硬件的MAC地址表进行查询转发。
随着以太网交换技术的成熟,并在城域网等更大范围的应用拓展,1980年2月,IEEE 802委员会成立,任务是制定局域网和城域网的通信标准,IEEE 802.1工作组则主要制定基于以太网的协议标准。
1991,针对大量交换机的部署产生了冗余链路等的一系列问题,IEEE 802.1工作组发布了802.1D STP生成树协议,并于1998年发布了第二部RSTP快速生成树协议,基本解决了各厂商设备在组网时容易产生环路等问题。
随着802.1D的制定,大规模用户组网条件已经成熟,1999年,IEEE 802.1发布802.1QVLAN协议作为802.1D的后续补充,能够将大规模的用户小区和城市区域使用虚拟网络标识的进行区分,解决了电信用户组网和城域网接入的IP限制问题。
进入21世纪以后,随着以太网的普及,基于以太网的多媒体应用需求与日俱增,于是2006年IEEE成立了AVB工作组,制定了一系列新的802.1技术标准,对现有以太网进行功能扩充,包括带宽保持、限制延时和精确时钟同步,提供了高质量、低延时、时间同步的音视频局域网解决方案。
随着工业4.0概念的提出和车联网时代的到来,工业和汽车对实时以太网技术的需求迅速增长,在2012年,AVB工作组更名为TSN工作组,在继承AVB已有的技术基础上,进一步针对实时通信的应用场景,制定并提出了更多可行的技术标准,籍此在未来的工业和汽车等领域继续引领以太网技术的发展。
2. TSN系列规范
TSN系列规范包含了非常多的技术标准,一部分来源于以往音视频、通信等领域的应用,一部分来源于芯片等技术厂商在技术实现上的探索。
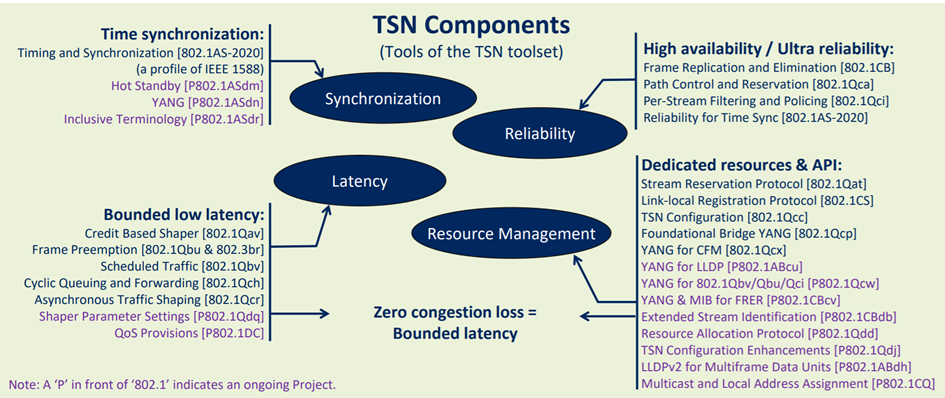
图1 TSN协议系列规范
当前已经发布的TSN系列规范大致分为四个部分:时间同步、调度延时、可靠性、资源管理。
时间同步的协议规范主要是802.1AS/802.1AS-Rev,基于数据链路层进行以交换机为关键节点的时钟同步机制的实现,主要来自于IEEE1588时间同步协议的简化版本,更适用于车载网络中实时性精度要求较高的通信传输场景。
目前主流的应用为2011版本,主要是基于单域或多域的时钟同步机制的实现,初步满足了基于以太网作为骨干网的电子电器架构的设计需求。

图2 802.1AS多域分布
最新发布的为2020版本,增加了时钟冗余和时钟传输路径冗余的实现,对满足车辆功能安全的需求提供了统一的解决方案。
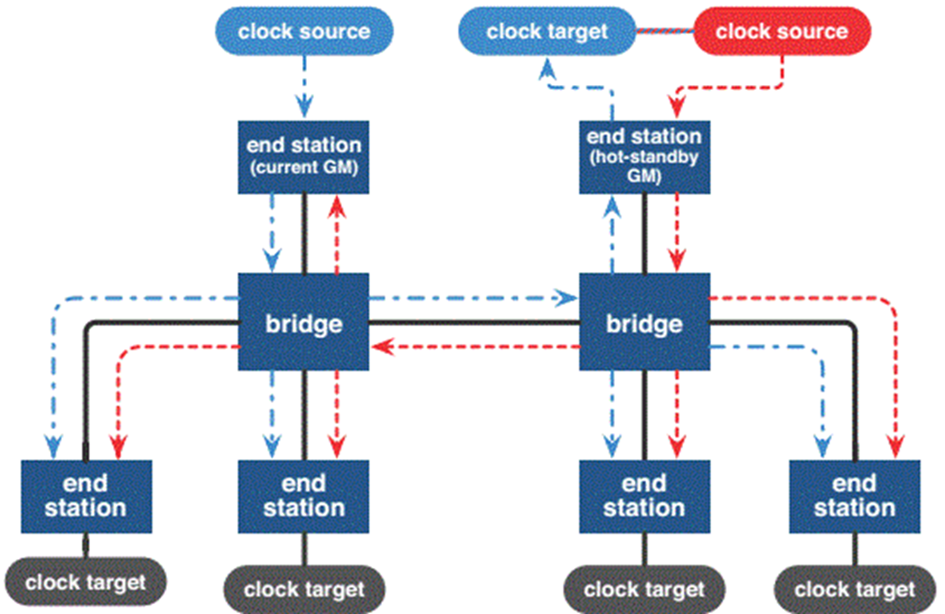
图3 802.1AS时钟实时冗余
802.1Qbv是在交换机多个输出队列的严格优先级(报文中的优先级通常来自于VLAN或者IP)模式下,利用门循环列表GCL(Gate Control List)来控制每个队列的开关时间窗口,来实现时间感知整形器TAS(Time-aware Shaper)的功能;GCL通常有8~16组,可通过灵活配置来实现不同延时需求的调度规则集合,进而对应不同优先级帧的最大传输延时保证来实现传输延时确定性和带宽的稳定性。

图4 802.1Qbv GCL调度
同时,802.1Qbv为了确保每个时间片的报文都能传输完成,预留了一个Gurad Band,长度最大可配置为一个标准以太网帧的MTU大小约1500字节,会增加约12.5us的延时损耗。为了不浪费这个带宽的等待时间,于是设计并引入了802.1Qbu规范。
802.1Qbu将数据帧分为可被抢占帧(Preemptable Frame)和快速帧(Express Frame),通常在每个交换机端口以优先级来对帧进行以上分类,即高优先级的帧可以对低优先级未传输完成的帧进行抢占发送,以减少传输延迟。抢占的规则一般通过设置最小可被抢占帧长度,例如若设置为128字节,则必须等待可被抢占帧传输完128字节才能对快速帧进行抢占发送,等快速帧发送完成后,再对被抢占帧未发送完成的部分进行发送。
802.1Qbu和802.1Qbv的同时使用,可以在保证链路延时和带宽相对确定的情况下,对高实时报文进一步降低传输延时。
802.1CB主要是通过交换机硬件的报文复制功能实现发送端数据帧的在交换机指定转发端口处的复制,并通过不同的交换机传输路径发送至最终目的节点所在的交换机连接端口,然后在该交换机端口利用交换机硬件的对特定协议复制帧的重复消除,进而利用网络拓扑中的冗余路径实现在传输链路中实时的可靠性数据备份,并且不增加软件收发数据产生的额外负载;相比传统的通信错误恢复机制,能够在正常通信链路发生错误时,利用在冗余路径中的实时数据保证通信不间断,且延时仅是冗余路径中多余交换机节点的转发延时,一般在10us左右,可以非常好地满足高实时高可靠性的应用场景。

图5802.1CB冗余策略
资源管理的系列规范类似于网络管理之类的协议和配置格式的一些规定,适合于灵活组网、易于维护的一些应用环境,并不适用于汽车上稳定性要求高、固定资源分配的策略,所以这里就暂不详细介绍了。
3. TSN在汽车上的应用
TSN在汽车上的应用主要使用了基于802.1AS-Rev的时钟同步协议,以及随后推出的802.1Qbv、802.1CB、802.1Qbu等一系列满足车载网络流量调度需求的协议规范。
未来的车载网络将
- 以中央计算大脑为车辆中心
- 以区控制器为局部中心
- 基于以太网作为骨干网的环状拓扑进行部署
为全车的智能化提供超大的带宽和连通性。

图6ZEEKR EE 3.0架构
随着网络拓扑的巨大变更,未来的车型将能够把整车线束总长度从3.5km以上降低至1.5km左右,减重100~200kg,实现电动汽车10%以上的续航提升,在降低硬件损耗的同时,带来非常可观的综合经济效益,对实现碳中和的国家战略提供强有力的支撑。
在极氪具有辅助驾驶和自动驾驶的功能的车型中,时钟同步精度是各个传感器实现高精度响应和定位外部环境的基础,包括1~9个激光雷达,1~6个毫米波雷达,12个超声波雷达,4~8个环视摄像头(鱼眼和侧视),1个前视高清识别摄像头,1个前视DVR摄像头,1个后视倒车摄像头,1个DMS摄像头,通过车内网络节点具备的硬件支持的802.1AS gPTP时钟同步功能,可以将各个传感器的时钟同步误差压缩到100ns~1us以内,基本上满足了车辆在高速和低速运行中各个场景的驾驶控制需求。

图7车辆自动驾驶传感器分布
对于新一代车型的车辆控制,通过区控制器的交换机功能进行大量实时性周期数据传输,依赖优化验证后的Qbv和Qbu配置,10ms、20ms、50ms、100ms等传统车辆运行中的CAN控制数据,均可以按照抖动性要求的误差等级,实现分批分时的确定带宽和确定延时的数据传输,基本能够满足100us~1ms的延时区间,实现与传统CAN网络数据转发性能要求的完全兼容。
同时,通过区控制器进行毫米波雷达的数据传输能够保留足够的实时带宽,车联网的地图等应用也能够保证及时响应,在线音视频应用也能够流畅播放,进而实现了多域融合在以太网作为骨干网的网络环境下的良好示范效应。
功能安全在应用汽车以太网作为骨干网的拓扑中主要关注的是通信安全。传统的CAN网络通信具有天然的组播通信方式,某一个节点的故障不会中断其他节点间的通信。
汽车以太网使用以交换机为中心转发节点的网络拓扑,使用的是集中式的点对点通信,需要使用队列来缓存报文和控制通信策略;如果传输路径中的转发节点出现故障,则可能会立刻中断整车各个区控制器之间的大量通信,会造成车辆控制中不可预知的风险。
802.1CB针对汽车以太网的先天性缺陷给出了一个利用硬件冗余通道来保持实时数据备份的方式,可以将需要备份的数据实时保留在通信线路中,提供硬件线路和软件流量的双重备份,能够有效地提升通信的功能安全等级。

图8802.1CB帧复制传输
4. 总结
汽车功能的智能化、网联化、多媒体化催生了新时代车载电子电气架构的升级和变革,涌现出了大量具有创造力的技术理念和个性化的应用场景,已经远远超出了物联网、车联网等新时代概念的范畴。
为了迎接这些挑战,极氪软件及电子中心将大胆探索,基于TSN的电子电气架构进行下一代智能车型的研发,并打造搭载ZEEKR OS的中央计算超级算力平台,在新的市场需求下不断突破创新,为汽车产业的技术创新奉献自己的青春和激情。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)