看了很多讲解针孔相机模型中从世界坐标系--->到相机坐标系——>图像坐标系的文章,心里的疑惑也逐渐展开,现在总结一下自己的理解:
世界坐标系、相机坐标系、图像物理坐标系、图像像素坐标系在我的另一篇博文里已经详细叙述。http://blog.csdn.net/wangxiaokun671903/article/details/37935113。他们之间的关系如下图所示:
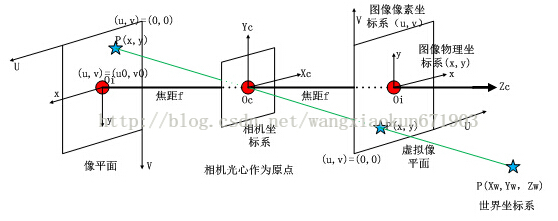
从世界坐标系到图像坐标系的转换过程如下:
1、世界坐标系通过外参矩阵转换到相机坐标系
空间中一点的世界坐标系为:[Xw,Yw,Zw]T,当把它转换到相机坐标系的时候,先把它加一维用齐次坐标来表示它(这样就方便对它本身进行平移操作)。左乘一个3x4的外参矩阵,从世界纵坐标系转换到相机坐标系。
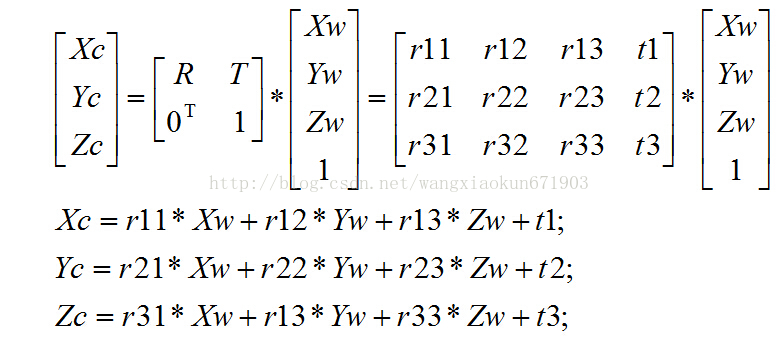
[Xc,Yc,Zc]T表示相机坐标。[Xw,Yw,Zw,1]T表示归物体所在的世界坐标。R表示旋转矩阵,T表示平移矩阵。
2、相机坐标系通过内参矩阵转换到图像像素坐标系:这一步是通过两步完成的。
(1),径向畸变和切向畸变:
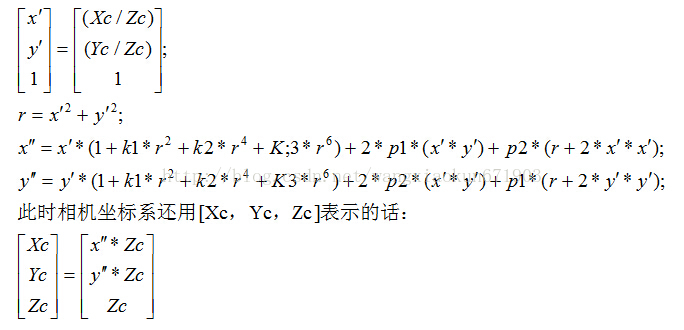
其中,k1,k2,k3径向畸变系数,p1,p2是切向畸变系数。畸变发生在相机坐标系转图像物理坐标系的过程中。操作的对象时相机坐标系。
这一步是加入畸变的过程,如果忽略这一步,可以直接跳到下一步。
(2),相机坐标系通过焦距对角矩阵和畸变系数转换到图像物理坐标系;
由图相似三角形可得:
f表示焦距。[Xc,Yc,Zc]T表示相机坐标。[x,y,1]T表示归一化后的图像物理坐标。
(3),图像物理坐标系通过像素转换矩阵转换到像素坐标系中。这一步是在同一个平面上做的,只不过先换了表示单位,又换了坐标原点的位置。
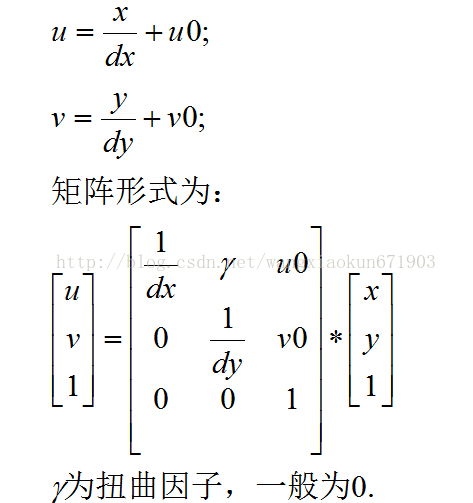
dx和dy表示:x方向和y方向的一个像素分别占多少个(可是小数)长度单位。u0,v0表示图像的中心像素坐标和图像原点像素坐标之间相差的横向和纵向像素数。
3、转换过程总公式如下
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)