原文出处:
http://www.cnblogs.com/hebaichuanyeah
与信号量一样,消息邮箱与消息列队都是一种事件块。
消息邮箱可以在任务间实现信息传递。
比如,在任务1中发送一条消息,任务2中接受,并发至串口终端显示。
OS_EVENT * MyMbox;
void Task_1(void *pdata)
{
char SendData[] = "hello world ";
#if OS_CRITICAL_METHOD == 3 //关中断的方法为3
OS_CPU_SR cpu_sr;
#endif
OS_ENTER_CRITICAL();
OS_CPU_SysTickInit(100000000/OS_TICKS_PER_SEC);
OS_EXIT_CRITICAL();
OSStatInit(); //统计任务 优先级最低
MyMbox = OSMboxCreate((void*)0);
//PIT0_Init(50000000);
UART4_Init(115200);
init_LED();
pdata = pdata;
while(1)
{
OSTaskResume(6);
OSMboxPost(MyMbox,&SendData);
OSTimeDly(500);
}
}
void Task_2(void *pdata)
{
U32 i;
U8 err;
char * ReceiveData = "";
pdata = pdata;
while(1)
{
ReceiveData = OSMboxPend(MyMbox,10,&err);
for(i=0;ReceiveData[i];i++)
Uart4_SendByte(ReceiveData[i]);
OSTaskSuspend(6);
}
}

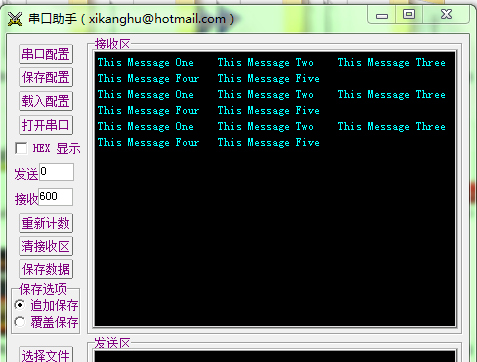
消息队列
OS_EVENT * MyQ;
void Task_1(void *pdata)
{
U8 i;
char * MyMessage[5];
void * ArrayOfMsg[5];
MyMessage[0] = "This Message One ";
MyMessage[1] = "This Message Two ";
MyMessage[2] = "This Message Three ";
MyMessage[3] = "This Message Four ";
MyMessage[4] = "This Message Five ";
#if OS_CRITICAL_METHOD == 3 //关中断的方法为3
OS_CPU_SR cpu_sr;
#endif
OS_ENTER_CRITICAL();
OS_CPU_SysTickInit(100000000/OS_TICKS_PER_SEC);
OS_EXIT_CRITICAL();
OSStatInit(); //统计任务 优先级最低
MyQ = OSQCreate(&ArrayOfMsg[0],5);
//PIT0_Init(50000000);
UART4_Init(115200);
init_LED();
pdata = pdata;
while(1)
{
OSTaskResume(6);
for(i=0;i<5;i++)
{
OSQPost(MyQ,&MyMessage[i][0]);
}
OSTimeDly(500);
}
}
void Task_2(void *pdata)
{
U32 i;
U8 err,count;
char * ReceiveData;
pdata = pdata;
while(1)
{
for(count=0;count<5;count++)
{
ReceiveData = OSQPend(MyQ,0,&err);
for(i=0;ReceiveData[i]!='\0';i++)
Uart4_SendByte(ReceiveData[i]);
}
for(i=0;i<100;i++)
Uart4_SendByte(' ');
OSTaskSuspend(6);
}
}
转载于:https://www.cnblogs.com/hebaichuanyeah/p/3249643.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)