
目前,在控制领域内神经网络正在稳步地发展,这种发展的动力主要来自3个方面[1]:(1)处理越来越复杂的系统的需要;(2)实现越来越高的设计目标的需要;(3)在越来越不确定的情况下进行控制的需要。
在控制中,应用较多的网络是BP网络,但BP网络存在局部最优问题,并且训练速度慢,效率低。RBF网络在一定程度上克服了这些问题,因此它的研究与应用越来越得到重视。下面将简单介绍RBF神经网络的有关理论,以及其在控制中的应用。
1 RBF神经网络介绍
RBF神经网络(Radial Basis Function Neural Network),即径向基神经网络,由Moody和 Darken在1988年提出,其结构如图1所示,是一种性能良好、具有单隐层的三层前向网络。输入层由信号源节点组成,第二层为隐含层,第三层为输出层。从输入空间到隐含层空间的变换是非线性的,而从隐含层空间到输match出层空间的变换是线性的,隐单元的变换函数是径向基函数,输出层神经元采用线性单元,RBF神经网络是一种局部分布的对中心径向对称衰减的非负非线性函数,已经证明,RBF网络是连续函数的最佳逼近,优于BP网络[2]。
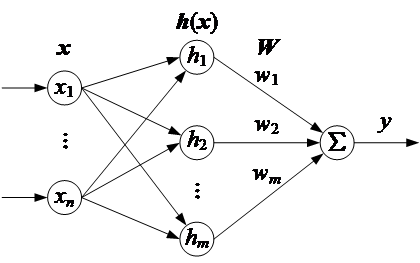
径向基函数有许多种形式,其中最为常用的是高斯核函数:
其中,x是n维输入向量;ci是第i个基函数的中心;σi是平滑参数,决定了第i基函数中心点的宽度;m是感知单元的个数; 表示范数,通常取欧式范数。
表示范数,通常取欧式范数。
输出表示为: 
上述算法表明,隐层节点中的作用函数对输人信号将在局部产生响应,即当输人信号越靠近基函数的中央范围时,隐层节点产生的输出就越大。
2 RBF神经网络
在控制中的应用
RBF神经网络在控制中的应用,可以按其隐含层与输出层连接权值的计算方式分为以下两类:
2.1 采用梯度下降法计算权值
采用梯度下降法计算神经网络权值的代表性研究工作如文献[3,4]。其基本思想为:首先根据控制方案设定误差指标,如控制误差指标、逼近误差指标E(t),然后根据误差指标,采用梯度下降法,更新计算权值,具体调整方式见[2]。其控制方案主要有基于RBF神经网络的监督控制、基于RBF神经网络的模型参考自适应控制、基于RBF神经网络的自校正控制等三类。
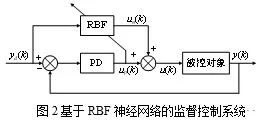
图2为基于RBF神经网络的监督控制系统,RBF神经网络误差指标选取为,总控制输入与RBF网络输出的差值,即E(k)=1/2(un(k)-u(k))2,其控制思想为:初始阶段采用PD反馈控制,然后过渡到神经网络控制。在控制过程中,如出现较大的误差,则PD控制起主导作用,神经网络控制起调节作用。

图3为基于RBF神经网络的模型参考自适应控制,RBF神经网络误差指标选取为,理想系统输出与实际系统输出的差值,即E(k)=1/2(ym(k)-y(k))2,其控制思想为:将RBF神经网络作为控制器,依据参考模型的输出,实现系统的跟踪控制。
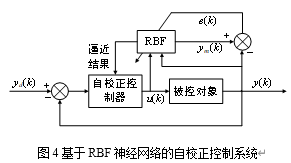
图4为基于RBF神经网络的自校正控制系统,该系统中,利用RBF神经网络逼近系统的未知函数或未知参数,然后用其逼近结果修正自校正控制器参数,RBF神经网络误差指标选取为逼近误差,即由RBF神经网络逼近系统模型得到的输出ym(k)与系统实际输出y(k)的差值。自校正控制可用于结构已知而参数未知但恒定的随机系统,也可用于结构已知而参数缓慢时变的随机系统。
采用梯度下降法计算神经网络权值,实现较为简单,但易陷人局部最优,且无法保证控制系统的稳定性和收敛性。
2.2 依据稳定性理论设计权值
依据稳定性理论设计权值,即通过分析系统的Lyapunov稳定性,设计权值,从而保证系统的稳定性和收敛性。
考虑如下二阶非线性系统,以自适应RBF控制器的设计为例,对该权值设计方式进行简要介绍。

其中,f为未知非线性函数;g为已知非线性函数;u∈Rn和y∈Rn分别为系统的控制输入和输出。
令 和
和 ,(3)式可以改写为
,(3)式可以改写为

设理想跟踪指令为yd,则误差为

设计 使多项式
使多项式 的根都在左半复平面。
的根都在左半复平面。
将RBF神经网络的输出代替式(3)中未知函数,可设计控制律为
其中, 为径向基函数,
为径向基函数, 为理想权值
为理想权值 的估计。
的估计。
通过分析系统的稳定性,可以设计权值计算方式为

其中γ为正常数, ,矩阵P为对称正定的矩阵且满足如下Lyapunov方程:
,矩阵P为对称正定的矩阵且满足如下Lyapunov方程:

其中,
则可通过设计RBF神经网络使逼近误差足够小,从而保证系统的稳定,证明见[1]。
在实际的控制系统设计中,为了保证网络的输人值处于高斯基函数的有效范围,应根据网络的输人值实际范围确定高斯基函数中心点坐标向量c值,为了保证高斯基函数的有效映射,需要将高斯基函数的宽度σ取适当的值。
依据稳定性理论设计的RBF神经网络,既可用于逼近未知参数或未知函数,又可直接作为控制器控制系统,进而又可以和鲁棒控制、滑模控制、反演控制等等理论相结合,进行控制器的设计。目前,已经产生了基于RBF神经网络的直接鲁棒自适应控制[5]、基于RBF神经网络的滑模控制[6]、基于RBF网络的动态面自适应控制[7]、以及基于RBF观测器的自适应控制[8]等等方法,为非线性控制问题的解决提供了新的思路。
3 总结
本文简要介绍了RBF神经网络以及其在控制中的应用,由于RBF神经网络独特的结构,可以大大加快学习速度并避免局部极小问题,可用于在线的辨识或控制,有着很大的发展潜力,可以进一步尝试应用于非线性系统的辨识与控制之中。
[1]刘金琨. RBF神经网络自适应控制MATLAB仿真[M]. 清华大学出版社, 2014.
[2] J.Park, I.W.Sandberg, Universal approximation using radial-basis-function networks[J], Neural Computation, 1991, 3(2): 246-257
[3] Noriega J R, Wang H (1998). A direct adaptive neural network control for unknown nonlinear systems and its application[J]. IEEE Trans Neural Netw 9(1) :27~34.
[4] Suykens, Johan. Artificial Neural Networks for Modeling and Control of Nonlinear Systems[M]// Artificial neural networks for modelling and control of non-linear systems. Kluwer Academic, 1995.
[5] Ge S S , Hang C C , Zhang T . A direct method for robust adaptive nonlinear control with guaranteed transient performance[J]. Systems & Control Letters, 1999, 37(5):275-284.
[6] Guo Yi, Jinkun LIU,Neural Network Based Adaptive Dynamic Surface Control for Flight Path Angle[C],the 51th IEEE Conference on Decision and Control, December 10- 13,2012, 5374- 5379,Maui, Hawaii, USA, 2012.
[7] Sonfack L L , Kenné, Godpromesse, Fombu A M . An improved adaptive RBF neuro-sliding mode control strategy: Application to a static synchronous series compensator controlled system[J]. International Transactions on Electrical Energy Systems, 2019.
[8] Abdollahi F, Talebi H A, Patel R V (2006) A stable neural network based observer with application to flexible joint manipulators[J]. IEEE Trans Neural Netw 17(1):118~ 129.
end
关注我们

