开源自主导航小车MickX4(五)gmapping建图
- 1 激光雷达驱动
- 2 3D点云到2D点云的转换
- 3 gmapping 建图
- 3.1 安装 gmapping库
- 3.2 配置 gmapping
- 3.3 启动 gmapping
- 3.4 保存地图
- 总结
- 参考资料
本章节主要描述了在室外环境如何把3D激光压缩称为2D通过gmapping建图。
1 激光雷达驱动
在读取数据时注意激光雷达的IP地址和你使用的路由器的IP网段以及电脑的IP一致。如果激光雷达是直接连上工控机的,则需要你自己设置工控机的IP为与激光雷达同一网段的静态IP。
这里我们使用的是速腾16线的3D激光雷达,这里主要参考了博客[1]对激光雷达的数据进行读取

这里需要注意一个问题: 速腾16线的3D激光雷达定义的坐标系是基线头指向Y轴的负方向,但是厂家的驱动里面进行了坐标系转换,转换成为了ROS下的右手坐标系。在文档的23页有注释说明。

2 3D点云到2D点云的转换
由于gmaping是2D激光SLAM的算法,不能直接使用3D点云建图,因此这里需要使用一个额外的包 pointcloud_to_laserscan[2] 将雷达采集到的3D点云压成2D点云。
这里需要注意一个问题,如果启动gmapping的时候出现报错,这主要是由于gmapping的堆栈大小的原因,3D转2D的时候点太密集,gmapping默认的堆栈太小,解决方法有两个:1是下载边缘gmapping的源码,手动把堆栈设置到4096大小。另一个方法就是把 pointcloud_to_laserscan 包中 angle_increment 调小一些,这样点就没有那么密,数据量就小了。

我所使用的配置参数如下:
<?xml version="1.0"?>
<launch>
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
<remap from="cloud_in" to="/rslidar_points"/>
<rosparam>
target_frame: rslidar # Leave disabled to output scan in pointcloud frame
transform_tolerance: 0.01
min_height: -1.5
max_height: 20
angle_min: -3.1415926 # -M_PI
angle_max: 3.1415926 # M_PI
angle_increment: 0.03 # M_PI/360.0
scan_time: 0.1
range_min: 0.2
range_max: 100.0
use_inf: true
inf_epsilon: 1.0
# Concurrency level, affects number of pointclouds queued for processing and number of threads used
# 0 : Detect number of cores
# 1 : Single threaded
# 2->inf : Parallelism level
concurrency_level: 2
</rosparam>
</node>
</launch>
这里3D转2D的效果并不好,这个包感觉上只是截取了集中一层的线条做映射。修改以后的包[4]

3 gmapping 建图
gmapping使用的条件主要由三个:
- 激光雷达数据 /scan (这里我们通过 pointcloud_to_laserscan 包把3D雷达压缩成为了2D提供到gmapping中)
- 里程计数据 /odom 话题(由底盘发布的里程计数据,这里由底盘节点mick_bringup节点包提供)
- TF变换数据 提供base_link、odmo和laser 的变换关系(base_link和odom之间的变换关系可以由发布/odom的节点提供,而激光雷达和基坐标系也就是 laser和base_link之间的变换关系可以URDF模型提供,或者是用在launch文件中写入静态的TF变换)
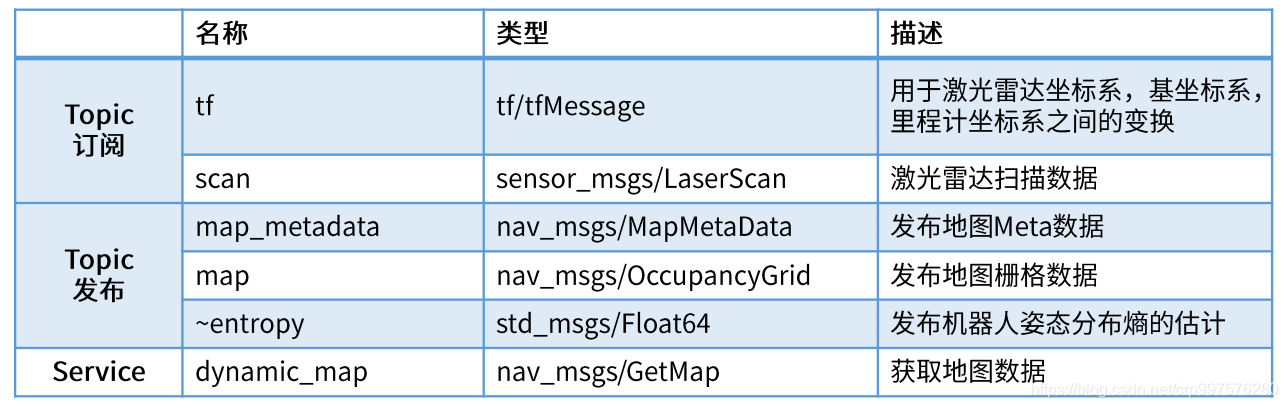
gmapping输出的话题有:/map的地图数据,以及一个获取地图的服务(在建图完成以后保存地图用)
图片来源于[3]
3.1 安装 gmapping库
sudo apt-get install ros-kinetic-gmapping
3.2 配置 gmapping
配置好坐标系关系以后,接下来我们需要配置gmapping的运行参数(我自己设置的运行参数如下),新建一个文件夹“mick_navigation”,在该文件夹中建立名为"launch"的文件夹,编写gmapping.launch文件:
<?xml version="1.0"?>
<launch>
<arg name="scan_topic" default="scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="odom_frame" value="odom"/>
<param name="base_frame" value="base_link"/>
<param name="map_frame" value="map"/>
<param name="throttle_scans" value="1"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="5.0"/>
<param name="maxRange" value="10.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="minimumScore" value="0.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.1"/>
<param name="angularUpdate" value="0.05"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="10"/>
<param name="xmin" value="-10.0"/>
<param name="ymin" value="-10.0"/>
<param name="xmax" value="10.0"/>
<param name="ymax" value="10.0"/>
<param name="delta" value="0.02"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
3.3 启动 gmapping
接下来我们启动相应的节点实现地图的扫描,首先我们要启动激光雷达、pointcloud_to_laserscan和底盘三个节点。这里我们把这几个launch文件写入到一个launch中,让其一起启动。在中新建launch文件 mickx4_gmapping.launch 写入一下内容:
<?xml version="1.0"?>
<launch>
<arg name="rviz" default="true"/>
<include file="$(find mick_bringup)/launch/mickx4_bringup.launch" />
<include file="$(find imu_driver)/launch/wit_imu.launch" />
<include file="$(find mick_description)/launch/state_publisher.launch" />
<include file="$(find rslidar_pointcloud)/launch/rs_lidar_16.launch" />
<include file="$(find pointcloud_to_laserscan)/launch/rslidar.launch" />
<include file="$(find mick_navigation)/launch/gmapping_no_rviz.launch" />
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="$(anon rviz)" respawn="false" output="screen" args="-d $(find mick_navigation)/rviz/gmapping.rviz" />
</launch>
最后新打开一个终端,启动gmapping节点
source / catkin_ws/devel/setup.bash
roslaunch mick_navigation mickx4_gmapping.launch
这里的场景是一个小范围的场景,小车行走的距离大概是500m左右,建图过程中发现很多问题,比如说在室外使用3D转到2D以后,这个激光的会有很多的噪点,激光数据延时也比较大。在比较空旷的地方转弯会使得车辆转弯估计不准,这是由于我们限定了3D-2D时候激光的测量范围,比如在十字路口的时候就会有一个‘’缺口“”存在,不像在室内环境激光都是一个完整的圈,因此此时旋转车就会使得地图建立的不准。
3.4 保存地图
扫描完毕以后你需要运行map_server节点来保存地图,最后获得两个文件(xxx.png和 xxx.yaml)
rosrun map_server map_saver -f test
.png 主要是地图文件、.yaml 包含有地图的参数,精度之类的。
总结
1、3D转2D时候这个包只保留了一条线,如果新建一个节点直接把Z轴压缩,把激光压缩到一个平面上,这样就会有很多条线的包罗在一起,在通过滤波处理一下,不知道效果会不会好一些?
2、gamapping在运行的时候依赖odom,如果odom不准确的话会使得gmapping建图的效果就会很差。 4轮差速模型转弯时候由于轮胎会和地面滑动摩擦,这会造成odom误差变大,尤其是没有加入IMU而直接使用轮子的差速模型计算航向角,以下是一个使用轮子计算yaw角导致odom不准的失败案例。
参考资料
[1] https://www.jianshu.com/p/4bf7102d661c?utm_campaign=maleskine&utm_content=note&utm_medium=seo_notes&utm_source=recommendation
[2] http://wiki.ros.org/pointcloud_to_laserscan
[3] https://blog.csdn.net/zhao_ke_xue/article/details/108944811
上一篇:开源自主导航小车MickX4(四)底盘URDF模型
下一篇:开源自主导航小车MickX4(六)cartographer 室外2D建图
欢迎大家点赞在评论区交流讨论(cenruping@vip.qq.com) O(∩_∩)O
或者加群交流(1149897304)

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)