Ubuntu18.04对应的ROS安装教程
- 一、ROS配置
- 1 配置Ubuntu18.04 软件仓库
- 2 开始安装
- 3 测试
- 二、遇到的问题
- 1 ROS无法下载问题
- 2 sudo: rosdep: command not found
- 3 rosdep update
- 4 roscore 无法运行
- 三、不同Ubuntu系统下ROS版本安装教程
- 1 Ubuntu 18.04 对应 ROS Melodic Morenia
- 2 Ubuntu 20.04 对应 ROS Noetic Ninjemys
一、ROS配置
1 配置Ubuntu18.04 软件仓库
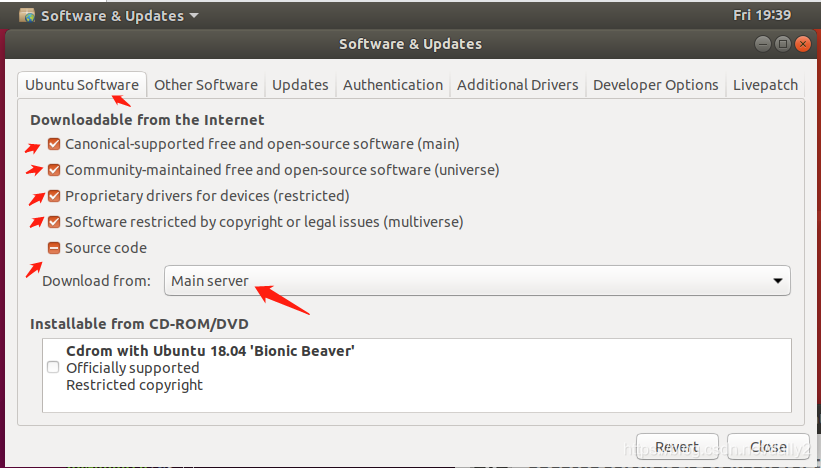
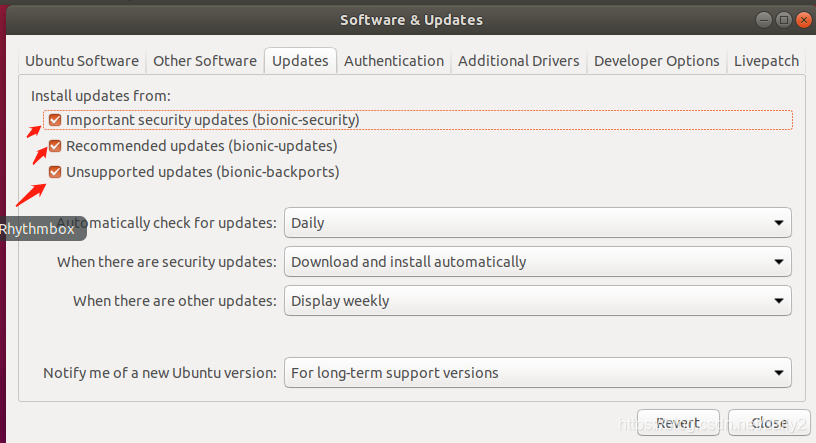
打开“软件和更新”,将ubuntu software和updates改成如下形式:
2 开始安装
Ubuntu18.04中文官方ROS安装教程传送门:http://wiki.ros.org/cn/melodic/Installation/Ubuntu
(注:从这里进入http://wiki.ros.org/ROS/Installation,可以根据需要自由选择Ubuntu18.04或者Ubuntu20.04对应的ROS官方安装教程)
下面是Ubuntu18.04系统下的ROS安装指令流程:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
3 测试
roscore

二、遇到的问题
1 ROS无法下载问题
1.打开软件和更新
2.将源改为“main server”
3.更新全打开
2 sudo: rosdep: command not found

解决方案:
sudo apt install python-rosdep
结果:

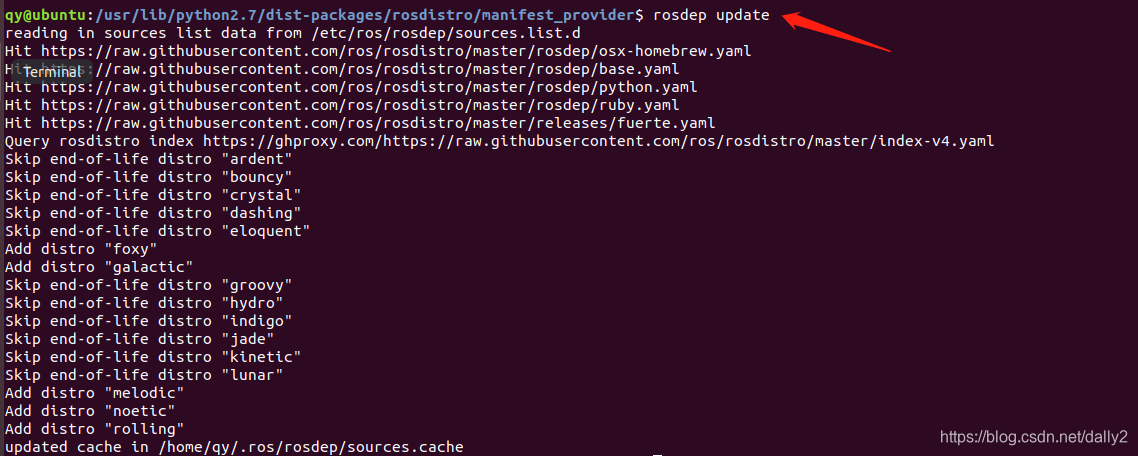
3 rosdep update
问题:

解决方案:添加 “https://ghproxy.com/” 。解释传送门
具体步骤:
cd /usr/lib/python2.7/dist-packages/rosdep2/
sudo gedit sources_list.py
(1)将DEFAULT_SOURCES_LIST_URL 改为'https://ghproxy.com/https://raw.githubusercontent.com/
ros/rosdistro/master/rosdep/sources.list.d/20-default.list'
(2)在download_rosdep_data(url)函数中加入:
url="https://ghproxy.com/"+url
sudo gedit gbpdistro_support.py
sudo gedit rep3.py
cd ../rosdistro
sudo gedit __init__.py
cd manifest_provider
sudo gedit github.py
rosdep update
结果:
4 roscore 无法运行
解决方案:
sudo apt install python-roslaunch
三、不同Ubuntu系统下ROS版本安装教程
1 Ubuntu 18.04 对应 ROS Melodic Morenia
ROS Melodic Morenia的官方安装教程:http://wiki.ros.org/melodic/Installation/Ubuntu
2 Ubuntu 20.04 对应 ROS Noetic Ninjemys
ROS Noetic Ninjemys的官方安装教程 :http://wiki.ros.org/noetic/Installation/Ubuntu
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)