环境传感器是一类我们很常用的传感器。它可以方便我们获取压力、温度、湿度以及空气质量等数据。在这一篇中,我们将分析BME680环境传感器的功能,并设计和实现BME680环境传感器的驱动。
1、功能概述
BME680是一款专为移动应用和可穿戴设备开发的集成环境传感器,其尺寸和低功耗是关键要求。
1.1、硬件接口
BME680由一个8针金属盖3.0 x 3.0 x0.93mm³LGA封装组成,旨在根据特定的工作模式,长期稳定性和高EMC稳健性进行优化消耗。可以选择采用I2C接口或者SPI接口。其管脚排布如下图:
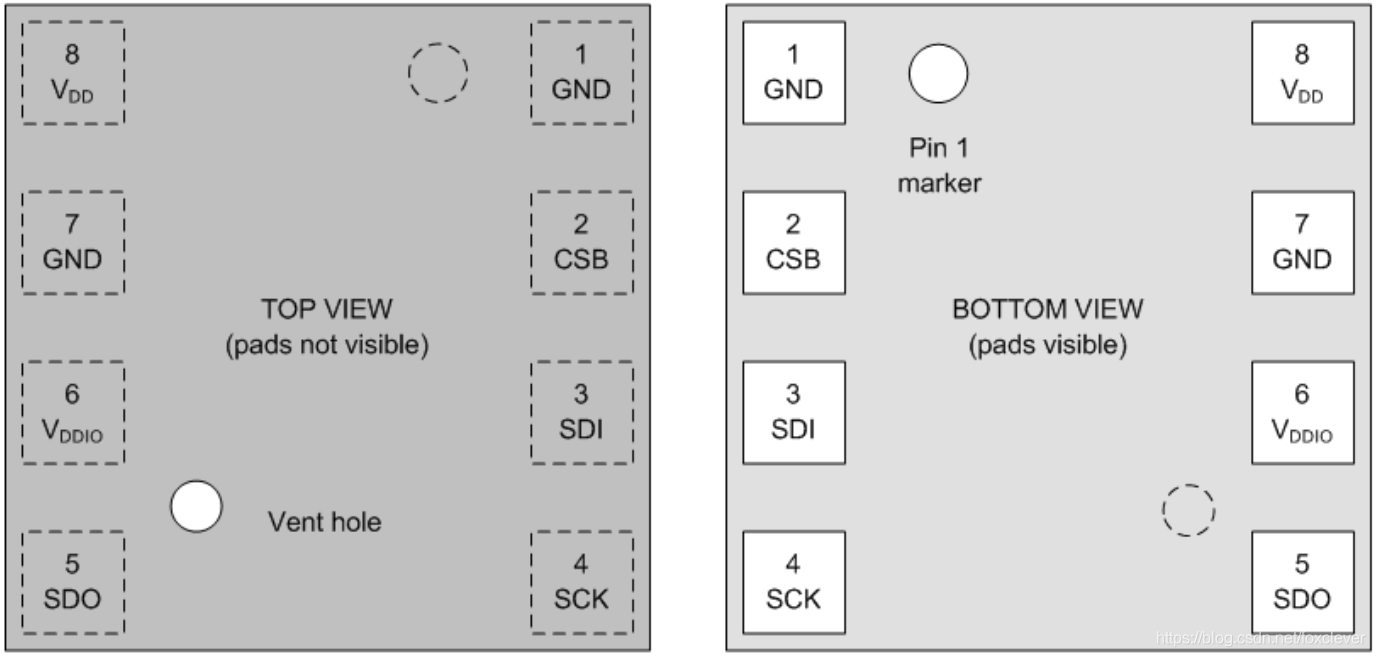
BME680环境传感器可以选择使用I2C接口或者SPI接口,在不同的接口模式及下各个引脚的定义及功能有一些差别。其具体分配及定义如下所示:
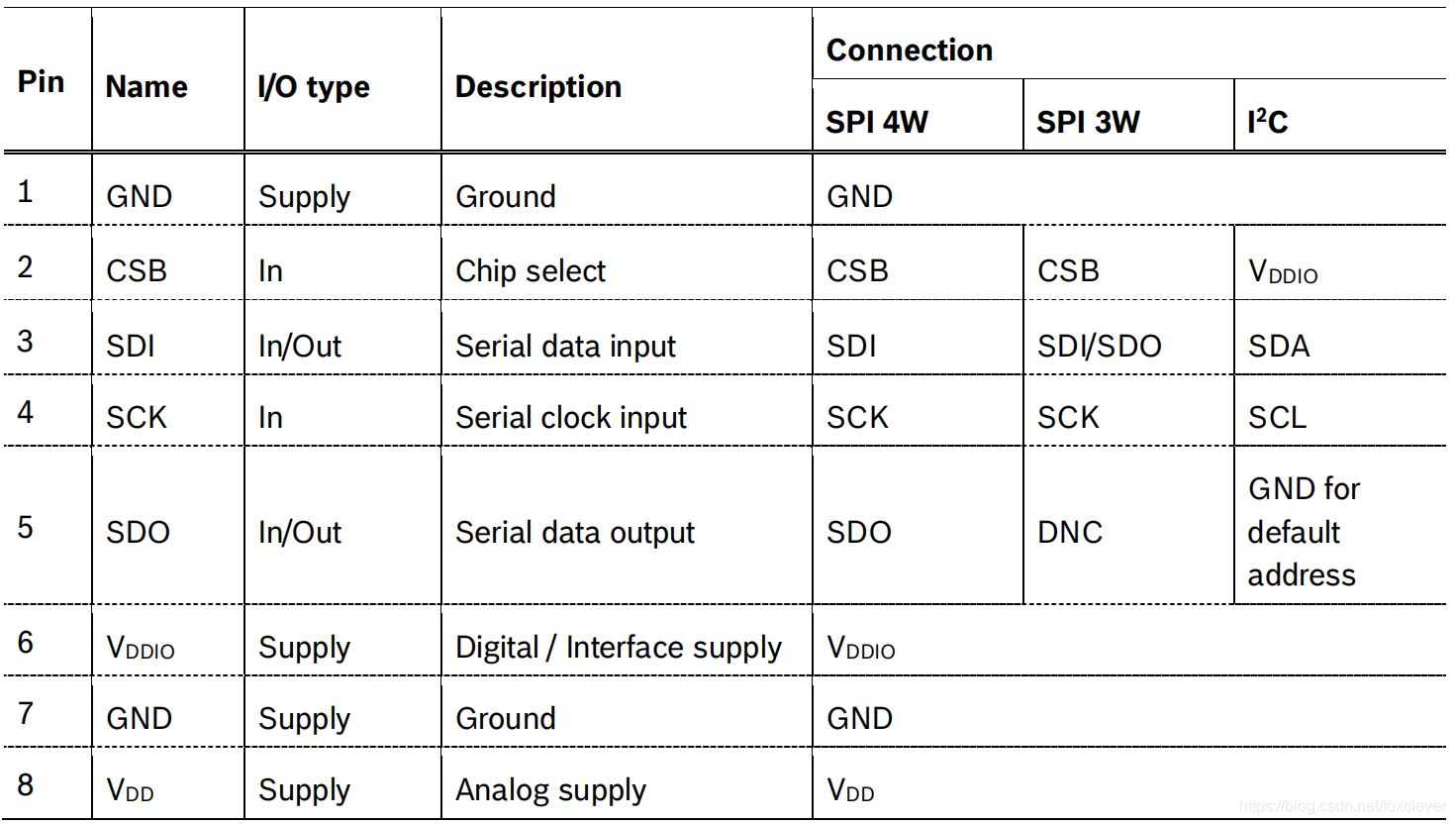
从上表中我们可以知道当CSB引脚接高电平VDDIO时,采用的是I2C接口。此时I2C的设备地址的最后一位由SDO引脚的电平决定。所以设备地址计7位为0x76或0x77,计8位则是0xEC或0xEE。
当CSB引脚用作片选信号时,则使用SPI接口。SPI接口支持模式0(CPOL=0,CPHA=0)和模式3(CPOL=1,CPHA=1)。同时支持3线SPI和4线SPI。控制字节的最高位为0时表示写,为1时表示读。
1.2、内置传感器
BME680扩展了博世现有的环境传感器系列,首次集成了高线性度和高精度的气体,压力,湿度和温度传感器。
1.2.1、气体传感器
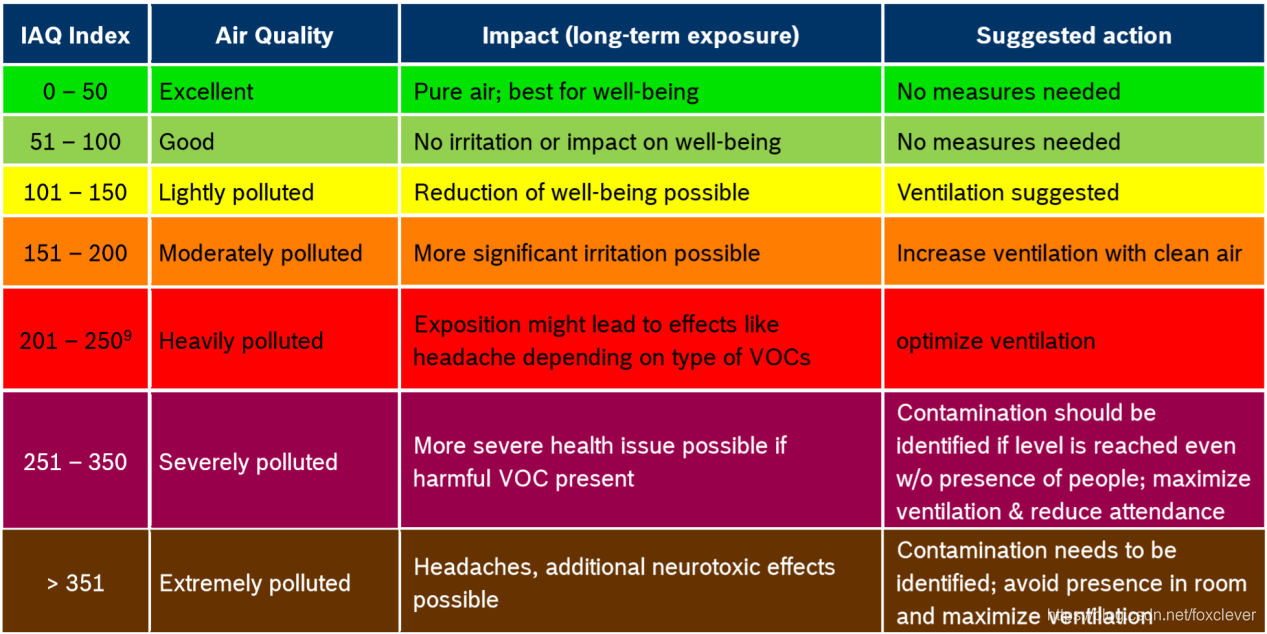
BME680内的气体传感器可以检测各种气体,以测量个人健康的空气质量。BME680可检测到的气体包括油漆(如甲醛),油漆,脱漆剂,清洁用品,家具等的挥发性有机化合物(VOC)。大气质量传感器的特性参数如下:

BME680采用了博世软件环境群组解决方案。该解决方案使用智能算术方法将空气质量索引(IAQ)作为输出。该指标将IAQ划分为0到500的索引数值用以指示IAQ,具体划分如下所示:
1.2.2、湿度传感器
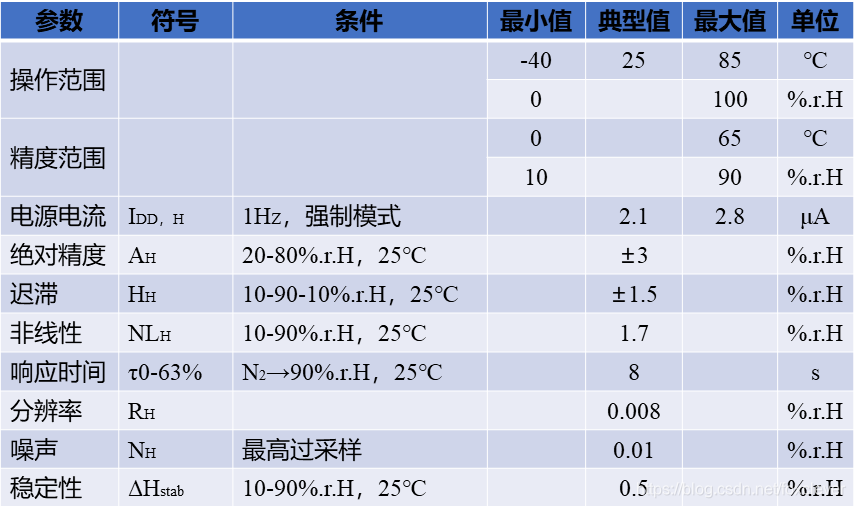
BME680集成了湿度传感器用于外部环境中湿度数据的采集。湿度传感器的性能参数如下:
1.2.3、压力传感器
BME680集成有大气压力传感器用于检测外部环境的绝对压力。压力传感器的性能参数如下:

1.2.4、温度传感器
BME680也集成了温度传感器用以检测温度数据,温度数据除了指示环境温度外,同时用于压力和湿度的补偿计算。温度传感器的性能参数如下:

1.3、数据存储结构
BME680采用特定的存储器区域来存储控制及数据信息。存储的数据包括测量数据、控制信息以及校准数据。
对于温度传感器,包括3个校准参数和一个ADC测量数据,其测量数据和校准数据的存储结构及地址如下:

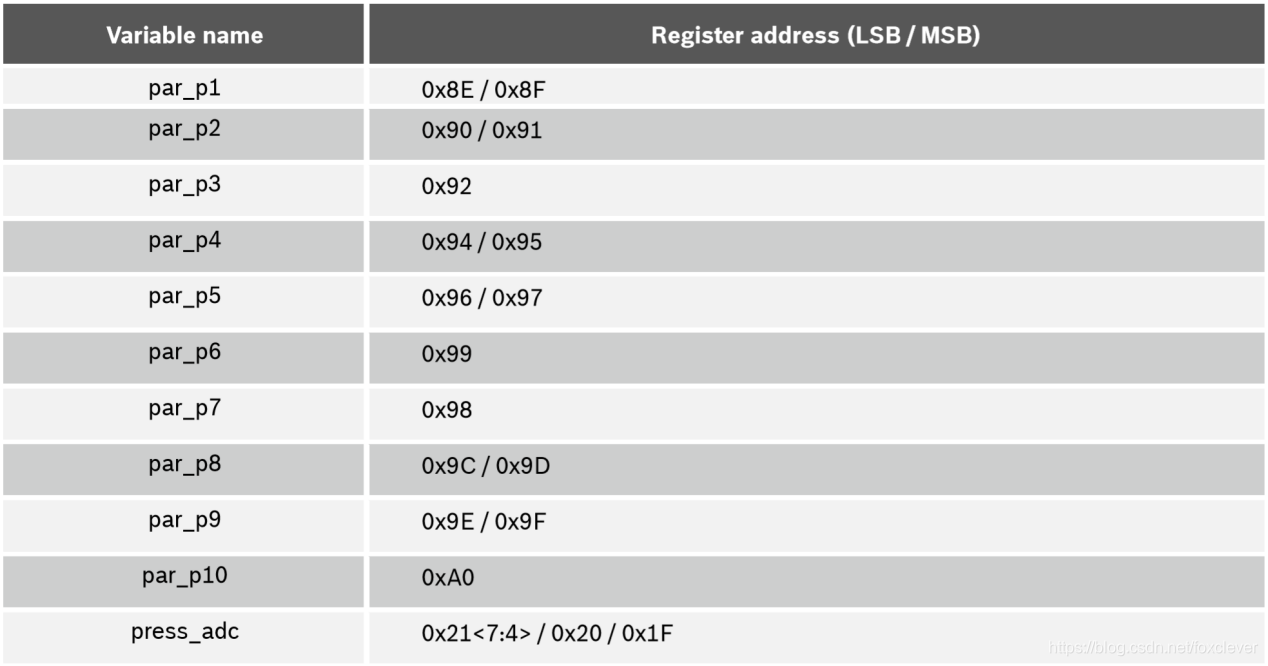
对于压力传感器,包括10个计算校准数据和一个ADC转换数据,其测量数据的校准数据存储结构及地址如下:
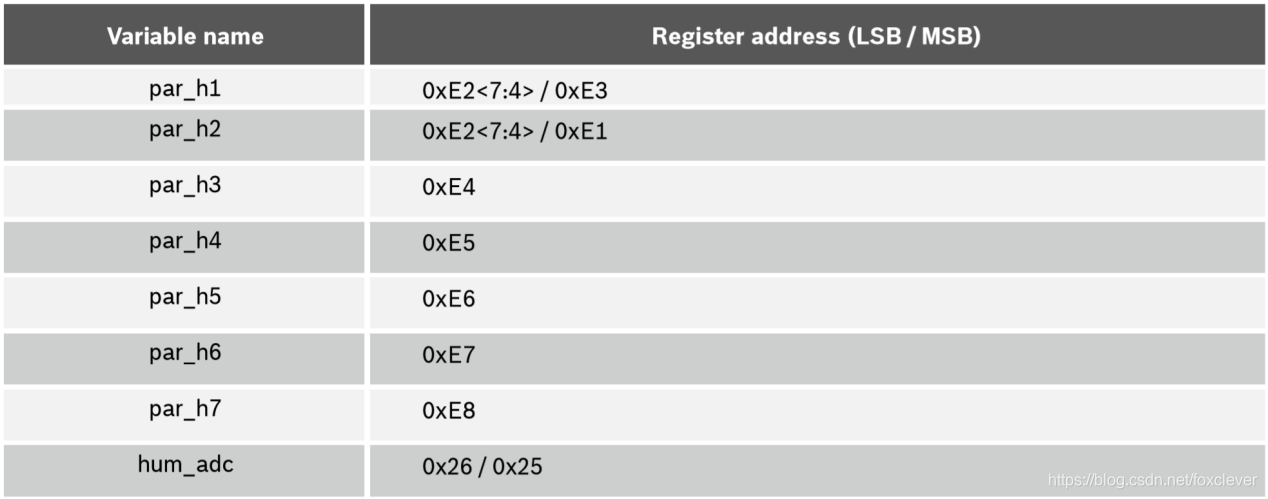
对于湿度传感器,包括7个计算校准数据和一个ADC转换数据,其测量数据的校准数据存储结构及地址如下:
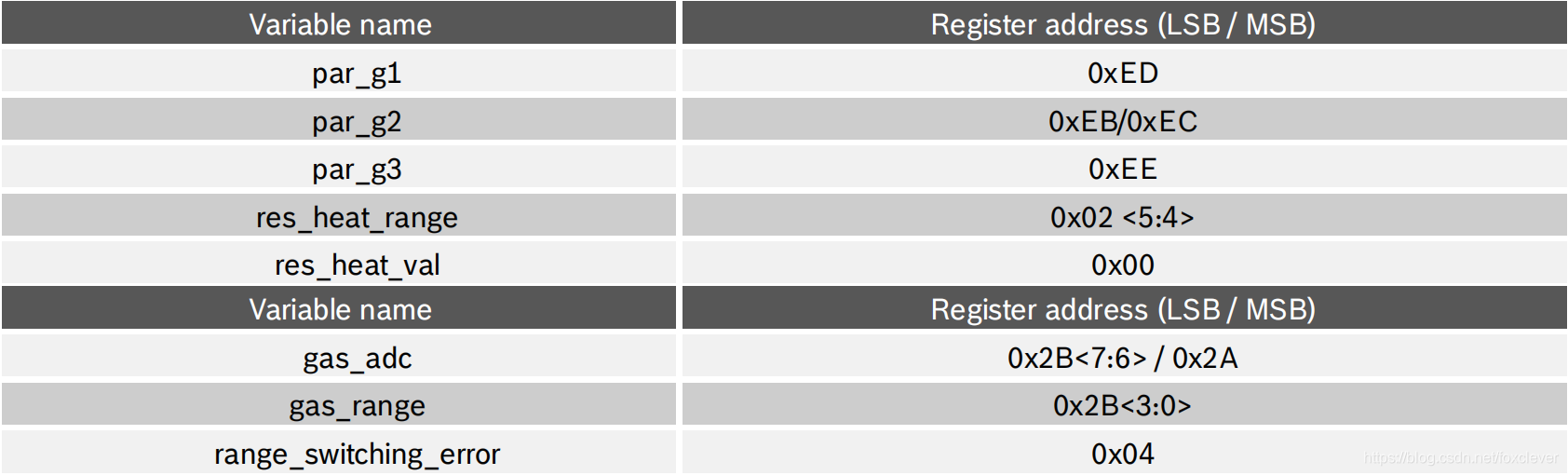
大气质量传感器,包括3个计算校准数据、一个加热器范围存储数据、一个加热器电阻校准因子存储数据、气体ADC测量数据、气体范围数据以及范围转换错误,其测量数据的校准数据存储结构及地址如下:
BME680环境传感器寄存器都是8位的,所有的操作均通过对寄存器的读写来实现。全部控制寄存器及数据寄存器的结构和地址如下:
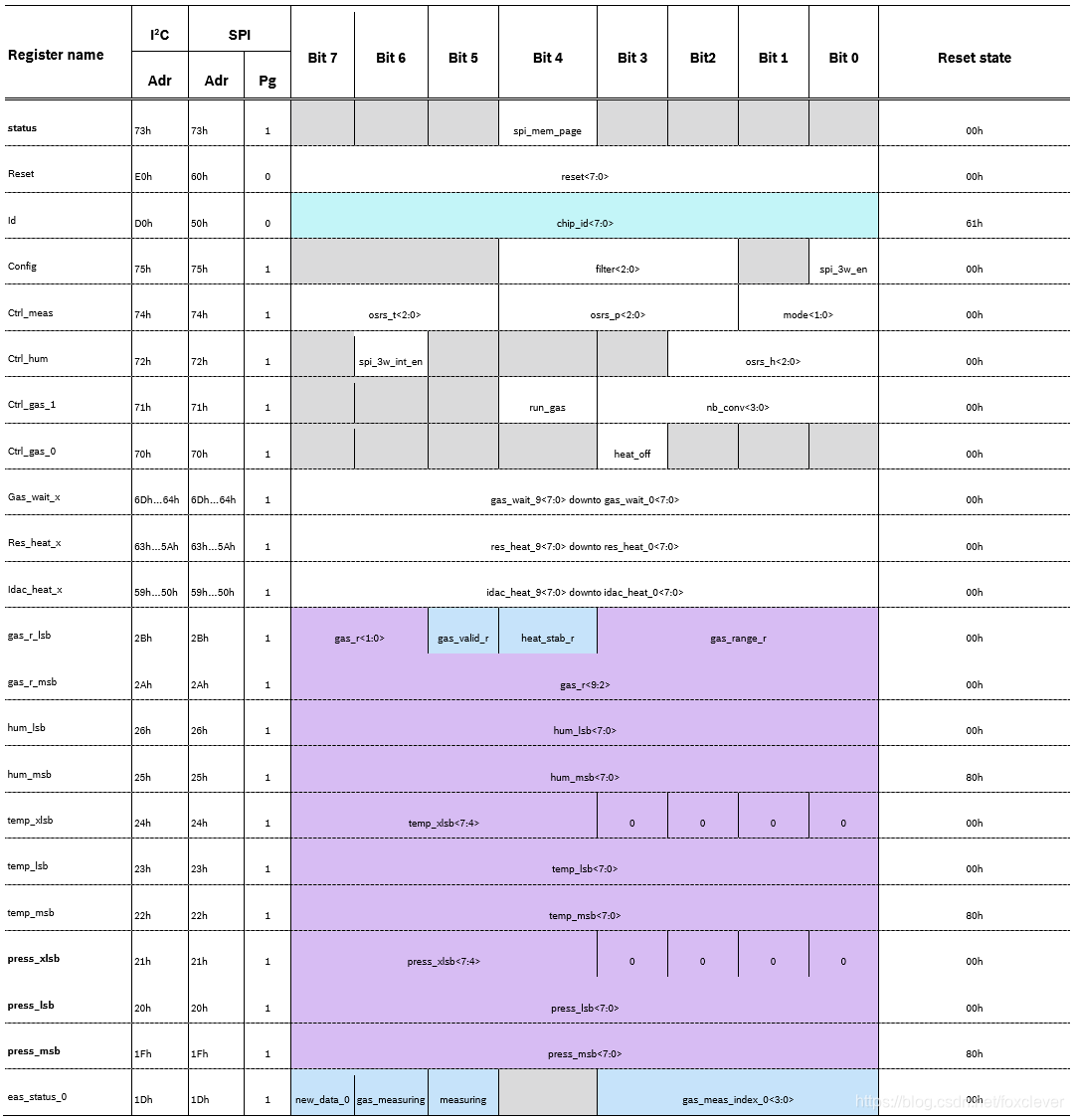
这里我们需要说明一下,BME680的存储器地址范围是0x00~0xFF,在I2C接口通讯时,通讯采用的是8位寄存器地址正好符合对应的寻址范围。但是采用SPI接口通讯时,寄存器地址的最高为被用于区分读写操作,所以地址只有7位,存储空间被分为2页。具体如下:

所以在使用SPI接口时需要分辨是哪一页。当前操作的是哪一页由Status寄存器来决定。
2、驱动设计与实现
我们对BME680环境传感器的基本情况已经有了整体了解,接下来我们将为BME680环境传感器设计并实现驱动程序。
2.1、对象定义
我们依然是采用基于对象的操作。所以我们需要定义对象,所以我们需要抽象出对象类型,并对我们想要操作的对象进行初始化。
2.1.1、对象抽象
对于一个对象来说,一般包括有属性和操作两方面的内容。接下来我们就从这两个方面分析BME680环境传感器的对象。
我们需要从BME680对象抽象出其属性,这些属性能够定义一个对象的特点并将其与其它对象区别开来。BME680支持SPI通讯和I2C通讯,所以我们将通讯端口作为属性以规定对象的通讯方式。在使用I2C时,设备有地址以区别不同的设备,所以我们将I2C设备地址也定义为属性。每台BME680都有一个ID用以区别于其它设备,所以我们将它定义为对象的属性。还有配置寄存器、测量控制寄存器、湿度控制寄存器、气体控制寄存器都记录了设备的配置状态,所以我们也将它们作为属性。每台设备都有特定的校准数据,这些校准数据每次数据检测都是需要的,所以我们用属性将它们记录下来。还有测量数据,它们标识了设备当前的工作状态,所以我们将它们也作为属性。
接下来我们分析BME680的操作。首先来讲,我们肯定要与BME680交互,但我们对BME680的读写依赖于具体的硬件平台,所以我们将它们作为对象的操作。在进行相关操作时,我们需要控制时序,则需要使用延时操作,但延时处理总是依赖于具体的软硬件平台,所以我们将延时处理作为对象的操作。而使用SPI时,没有设备地址但有片选信号,如何操作片选信号依赖于硬件平台,我们将对片选的操作定义为对象的操作函数。
根据上述的分析,我们可以得到BME680环境传感器的对象类型如下:
/*定义BME680操作对象*/
typedef struct BME680Object{
uint8_t chipID; //芯片ID
uint8_t bmeAddress; //I2C通讯时的设备地址
uint8_t memeryPage; //用于在SPI接口时记录当前所处的内存页
uint8_t config; //配置寄存器
uint8_t ctrlMeas; //测量控制寄存器
uint8_t ctrlHumi; //湿度测量控制寄存器
uint8_t ctrlGas0; //气体控制寄存器0
uint8_t ctrlGas1; //气体控制寄存器1
uint8_t resHeat;
uint8_t gasWait;
BME680PortType port; //接口选择
BME680CalibParamType caliPara; //校准参数
#if BME680_COMPENSATION_SELECTED > (0)
int32_t temperature; //温度值
int32_t pressure; //压力值
int32_t humidity; //湿度值
int32_t gasResistence; //大气质量电阻值
int32_t iaq; //空气质量水平
#else
float temperature; //温度值
float pressure; //压力值
float humidity; //湿度值
float gasResistence; //大气质量电阻值
float iaq; //空气质量水平
#endif
void (*Read)(struct BME680Object *bme,uint8_t regAddress,uint8_t *rData,uint16_t rSize); //读数据操作指针
void (*Write)(struct BME680Object *bme,uint8_t regAddress,uint8_t command); //谢数据操作指针
void (*Delayms)(volatile uint32_t nTime); //延时操作指针
void (*ChipSelect)(BME680CSType cs); //使用SPI接口时,片选操作
}BME680ObjectType;
片选操作有一点需要注意,如果片选信号在硬件电路上固定有效时,可以将NULL给它,同样在SPI接口时也需要将NULL给它。
2.1.2、对象初始化函数
一个对象必须对其进行初始化才可使用。初始化对象主要有四个方面的内容:检查对象赋值的合法性;属性赋初值;为对象操作指定函数指针;对象所指向设备的初始配置。据此我们可以编写BME680环境传感器的初始化函数如下:
/*实现BME680初始化配置*/
void BME680Initialization(BME680ObjectType *bme, //BMP280对象
uint8_t bmeAddress, //I2C接口是设备地址
BME680PortType port, //接口选择
BME680IIRFilterType filter, //过滤器
BME680SPI3wUseType spi3W_en, //3线SPI控制
BME680TempSampleType osrs_t, //温度精度
BME680PresSampleType osrs_p, //压力精度
BME680SPI3wIntType spi3wint_en,//3线SPI中断控制
BME680HumiSampleType osrs_h, //湿度精度
BME680GasRunType run_gas, //气体运行设置
BME680HeaterSPType nb_conv, //加热器设定点选择
BME680HeaterOffType heat_off, //加热器关闭
uint16_t duration, //TPHG测量循环周期,ms单位
uint8_t tempTarget, //加热器的目标温度
BME680Read Read, //读数据操作指针
BME680Write Write, //写数据操作指针
BME680Delayms Delayms, //延时操作指针
BME680ChipSelect ChipSelect //片选操作指针
)
{
uint8_t try_count = 5;
uint8_t regValue=0;
if((bme==NULL)||(Read==NULL)||(Write==NULL)||(Delayms==NULL))
{
return;
}
bme->Read=Read;
bme->Write=Write;
bme->Delayms=Delayms;
bme->port=port;
if(bme->port==BME680_I2C)
{
if((bmeAddress==0xEC)||(bmeAddress==0xEE))
{
bme->bmeAddress=bmeAddress;
}
else if((bmeAddress==0x76)||(bmeAddress==0x77))
{
bme->bmeAddress=(bmeAddress<<1);
}
else
{
return;
}
bme->ChipSelect=NULL;
}
else
{
if(ChipSelect!=NULL)
{
bme->ChipSelect=ChipSelect;
}
else
{
bme->ChipSelect=BME680ChipSelectDefault;
}
}
bme->chipID=0x00;
bme->pressure=0.0;
bme->temperature=25.0;
bme->humidity=0.0;
bme->bmeAddress=0x00;
bme->caliPara.t_fine=0;
if(!ObjectIsValid(bme))
{
return;
}
while(try_count--)
{
ReadBME680Register(bme,REG_BME680_ID,®Value,1);
bme->chipID=regValue;
if(0x61==bme->chipID)
{
BME680SoftReset(bme);
break;
}
}
if(try_count)
{
uint8_t waitTime;
waitTime=CalcProfileDuration(bme,duration,osrs_t,osrs_p,osrs_h);
//控制寄存器配置
ConfigControlRegister(bme,filter,spi3W_en,osrs_t,osrs_p,spi3wint_en,osrs_h,run_gas,nb_conv,heat_off,waitTime,tempTarget);
//读取校准值
GetBME680CalibrationData(bme);
}
}
2.2、对象操作
每一个对象都有操作,我们使用对象的目的当然是通过操作对象来获取我们需要的数据。所以开发驱动时,对象的操作才是我们主要的工作内容。在这里对BME680的操作就是对其寄存器的操作。
2.2.1、写寄存器操作
我们已经说过了,对BME680的操作都是通过读写寄存器实现的。这里我们先来看写寄存器。在I2C接口方式下,写寄存器操作是在从站地址的最后一位来识别的,再加上要写的寄存器地址和数据来实现的,这也是I2C协议的标准做法。其时序图如下所示:

而在SPI接口方式下,由于SPI并未有设备地址,也不存在用从还在那地址最后为来标记读写的模式。通常一些设备需要定义操作码来实现读写区分,但BME680采取了将寄存器地址的最高位置零表示为写。之所以可以这样定义,是因为BME680寄存器地址分配的特殊性决定的。改变寄存器地址的最高位也能区分不同的寄存器,绝不会重复。在SPI接口方式下,写寄存器的时序图如下所示:

根据上述描述和时序图,我们可以实现写BME680环境传感器寄存器的程序。
/* 向BME680寄存器写一个字节 */
static void WriteBME680Register(BME680ObjectType *bme,uint8_t regAddress,uint8_t command)
{
if(ObjectIsValid(bme))
{
if(bme->port==BME680_SPI)
{
bme->ChipSelect(BME680CS_Enable);
bme->Delayms(1);
SetMemeryPageNumber(bme,regAddress);
regAddress&=0x7F;
bme->Delayms(1);
bme->Write(bme,regAddress,command);
bme->Delayms(1);
bme->ChipSelect(BME680CS_Disable);
}
else
{
bme->Write(bme,regAddress,command);
}
}
}
2.2.2、读寄存器操作
读寄存器的处理方式与写寄存器是类似。在I2C接口方式下,将从站地址的最低位置1来表示读。在I2C接口方式下,读寄存器的时序图如下所示:
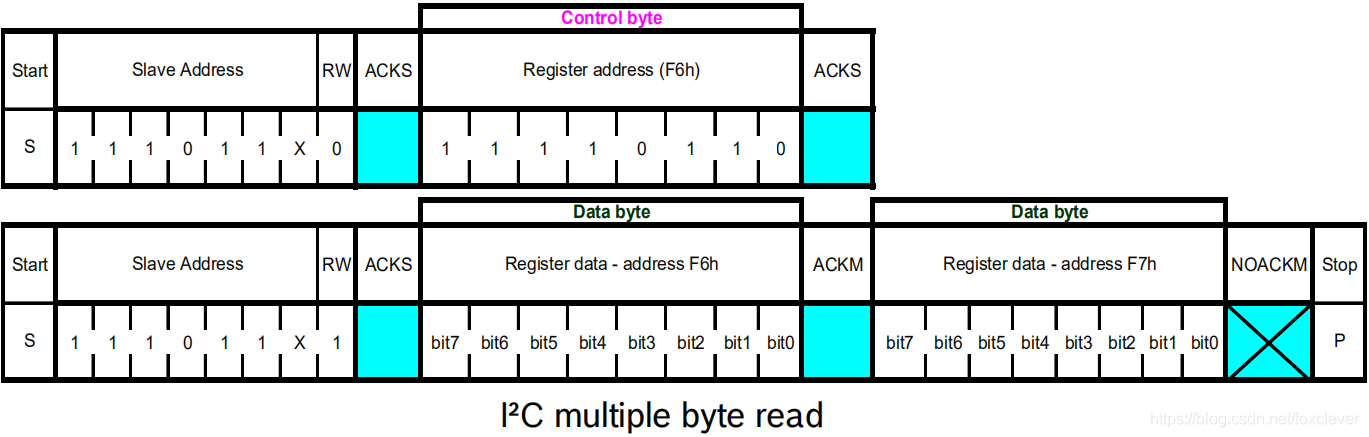
而在SPI接口方式下,通过将寄存器地址的最改为置1来标识为读操作。事实上,所有寄存器地址的最高为都是1,所以在读操作时实际不需要做处理。在SPI接口方式下,读寄存器的时序图如下所示:

根据上述描述和时序图,我们可以实现读BME680环境传感器寄存器的程序。
/*从BME680寄存器读取数据*/
static uint8_t ReadBME680Register(BME680ObjectType *bme,uint8_t regAddress,uint8_t *rDatas,uint16_t rSize)
{
uint8_t bmeError=0xFF;
if(ObjectIsValid(bme))
{
if(bme->port==BME680_SPI)
{
bme->ChipSelect(BME680CS_Enable);
bme->Delayms(1);
SetMemeryPageNumber(bme,regAddress);
regAddress |= 0x80;
bme->Delayms(1);
bme->Read(bme,regAddress,rDatas,rSize);
bme->Delayms(1);
bme->ChipSelect(BME680CS_Disable);
}
else
{
bme->Read(bme,regAddress,rDatas,rSize);
}
bmeError=0x00;
}
return bmeError;
}
3、驱动的使用
上一节我们设计并实现了BME680环境传感器的驱动程序,但这个驱动设计的是否合理还不确定,所以我们来设计一个简单的应用验证BME680环境传感器的驱动。
3.1、声明并初始化对象
使用基于对象的操作我们需要先得到这个对象,所以我们先要使用前面定义的BME680环境传感器对象类型声明一个BME680环境传感器对象变量,具体操作格式如下:
BME680ObjectType bme680;
声明了这个对象变量并不能立即使用,我们还需要使用驱动中定义的初始化函数对这个变量进行初始化。这个初始化函数所需要的输入参数如下:
BME680ObjectType *bme,BMP680对象
uint8_t bmeAddress,I2C接口是设备地址
BME680PortType port,接口选择
BME680IIRFilterType filter,过滤器
BME680SPI3wUseType spi3W_en,3线SPI控制
BME680TempSampleType osrs_t,温度精度
BME680PresSampleType osrs_p,压力精度
BME680SPI3wIntType spi3wint_en,3线SPI中断控制
BME680HumiSampleType osrs_h,湿度精度
BME680GasRunType run_gas,气体运行设置
BME680HeaterSPType nb_conv,加热器设定点选择
BME680HeaterOffType heat_off,加热器关闭
uint16_t duration,TPHG测量循环周期,ms单位
uint8_t tempTarget,加热器的目标温度
BME680Read Read,读数据操作指针
BME680Write Write,写数据操作指针
BME680Delayms Delayms,延时操作指针
BME680ChipSelect ChipSelect,片选操作指针
对于这些参数,对象变量我们已经定义了。其他的参数基本都是配置参数,我们根据实际使用需求选择输入就好了。主要的是我们需要定义几个函数,并将函数指针作为参数。这几个函数的类型如下:
/* 定义读数据操作函数指针类型 */
typedef void (*BME680Read)(struct BME680Object *bme,uint8_t regAddress,uint8_t *rData,uint16_t rSize);
/* 定义写数据操作函数指针类型 */
typedef void (*BME680Write)(struct BME680Object *bme,uint8_t regAddress,uint8_t command);
/* 定义延时操作函数指针类型 */
typedef void (*BME680Delayms)(volatile uint32_t nTime);
/* 定义使用SPI接口时,片选操作函数指针类型 */
typedef void (*BME680ChipSelect)(BME680CSType cs);
对于这几个函数我们根据样式定义就可以了,具体的操作可能与使用的硬件平台有关系。若采用的SPI接口则需注意片选操作,片选操作函数用于多设备需要软件操作时,如采用硬件片选可以传入NULL即可。同样如果采用的是I2C接口,则片选可以传入NULL即可。具体函数定义如下:
/*读BME680寄存器值*/
static void ReadDataFromBME680(BME680ObjectType *bme680,uint8_t regAddress,uint8_t *rData,uint16_t rSize)
{
HAL_I2C_Master_Transmit(&bme680hi2c, bme680->bmeAddress,®Address,1,1000);
HAL_I2C_Master_Receive(&bme680hi2c, bme680->bmeAddress+1,rData, rSize, 1000);
}
/*写BME680寄存器值*/
static void WriteDataToBME680(BME680ObjectType *bme680,uint8_t regAddress,uint8_t command)
{
uint8_t pData[2];
pData[0]=regAddress;
pData[1]=command;
HAL_I2C_Master_Transmit(&bme680hi2c,bme680->bmeAddress, pData, 2,1000);
}
对于延时函数我们可以采用各种方法实现。我们采用的STM32平台和HAL库则可以直接使用HAL_Delay()函数。于是我们可以调用初始化函数如下:
BME680Initialization(&bme680, //BME280对象
0xEC, //I2C接口是设备地址
BME680_I2C, //接口选择
BME680_IIR_FILTER_COEFF_X127, //过滤器
BME680_SPI3W_DISABLE, //3线SPI控制
BME680_TEMP_SAMPLE_X16, //温度精度
BME680_PRES_SAMPLE_X16, //压力精度
BME680_SPI3W_INT_DISABLE, ///3线SPI中断使能
BME680_HUMI_SAMPLE_X16, //湿度精度
BME680_GAS_RUN_ENABLE,//气体运行设置
BME680_HEATER_SP0,//加热器设定点选择
BME680_HEATER_DISABLE,//加热器关闭
20,//TPHG测量循环周期,ms单位
200,//加热器的目标温度
ReadDataFromBME680, //读数据操作指针
WriteDataToBME680, //写数据操作指针
HAL_Delay, //延时操作指针
NULL //片选操作指针
);
3.2、基于对象进行操作
我们定义了对象变量并使用初始化函数给其作了初始化。接着我们就来考虑操作这一对象获取我们想要的数据。我们在驱动中已经将获取数据并转换为转换值的比例值,接下来我们使用这一驱动开发我们的应用实例。
/*获取环境数据*/
void BME680GetEnvironmentalData(void)
{
float pressure; //压力值
float temperature; //温度值
float humidity; //湿度值
float gasResistance; //气体电阻
GetBME680Measure(&bme680);
pressure=bme680.pressure;
temperature=bme680.temperature;
humidity=bme680.humidity;
gasResistance=bme680.gasResistence;
}
4、应用总结
我们设计并实现了BME680环境传感器的驱动程序,并基于这一驱动程序设计了简单的应用。我们获得了BME680检测的全部环境数据,结果也是令我们满意的,这说明我们的驱动设计是正确的。
在使用驱动时需注意,采用SPI接口的器件需要考虑片选操作的问题。如果片选信号是通过硬件电路来实现的,我们在初始化时给其传递NULL值。如果是软件操作片选则传递我们编写的片选操作函数。而如果采用I2C接口,那么在初始化时也应传递NULL值。
BME680环境传感器支持SPI和I2C两种接口,而且SPI也支持3线和4线模式,但我们在测试应用中只使用了I2C接口,SPI接口还有待测试。BME680环境传感器在使用SPI接口时,支持SPI模式0(CPOL=CPHA=0)和模式3(CPOL=CPHA=1)。而在使用I2C接口时,支持标准模式、快速模式以及高速模式。而且在使用I2C接口时,SDO引脚必须接高电平或低电平,以确定设备地址。
BME680环境传感器有2种工作模式:休眠模式和强制模式。在设备上电后就进入休眠模式,在这种模式下设备不执行测量工作。一旦启动强制模式则执行一遍TPHG循环检测。模式设定的具体定义如下:

对于BME680环境传感器有一个测量范围寄存器,这个寄存器的值对应两组计算常数,这下常数用于测量值的计算,具体如下:

总的来说对BME680环境传感器的读写操作本身并不复杂,但其计算与修正关系却相对复杂,特别是气体质量数据更应注意。
源码下载:https://github.com/foxclever/ExPeriphDriver
欢迎关注:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)