1.首先安装VSCode插件CMake和CMake Tools

- CMake插件主要功能是CMake语法高亮、自动补全
- CMake Tools的功能主要是结合VSCode IDE使用CMake这个工具,比如生成CMake项目、构建CMake项目等
2.新建CMake项目
Ctrl+Shift+p打开VSCode的指令面板,然后输入cmake:q,VSCode会根据输入自动提示,然后选择CMake: Quick Start

然后选择适合你的编译器(VSCode会将你安装的编译器都罗列出来供你选择。如果你是交叉编译,那么就可以在这里配置你的交叉编译器),为方便演示这里我们选择GCC7.4.0:

然后根据提示输入项目名称:

然后选择该项目是创建库还是可执行文件,为了演示方便这里我们选择可执行文件Executable:

然后VSCode就会为你生成一个CMake项目,如下所示:

- build文件夹是
cmake指令的输出文件夹 - 默认生成的
CMakeLists.txt文件 - 默认生成的
main.cpp文件
3. 编译项目
当然你可以在命令行中执行:
cd build
cmake ..
但是VSCode提供了更便捷的方式(点击底部的Build):

或者在VSCode的命令面板中选择build命令(输入cmake后VSCode会帮你列出所有支持的命令):

4. 调试
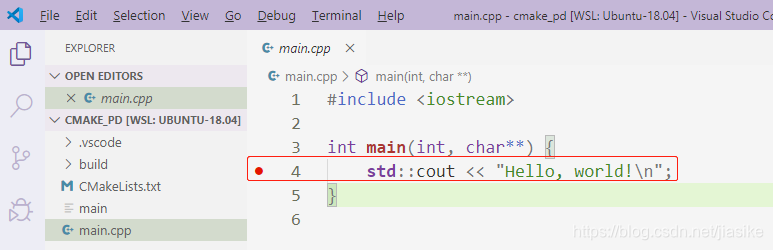
首先在源码中打上断点:
然后配置调试环境:
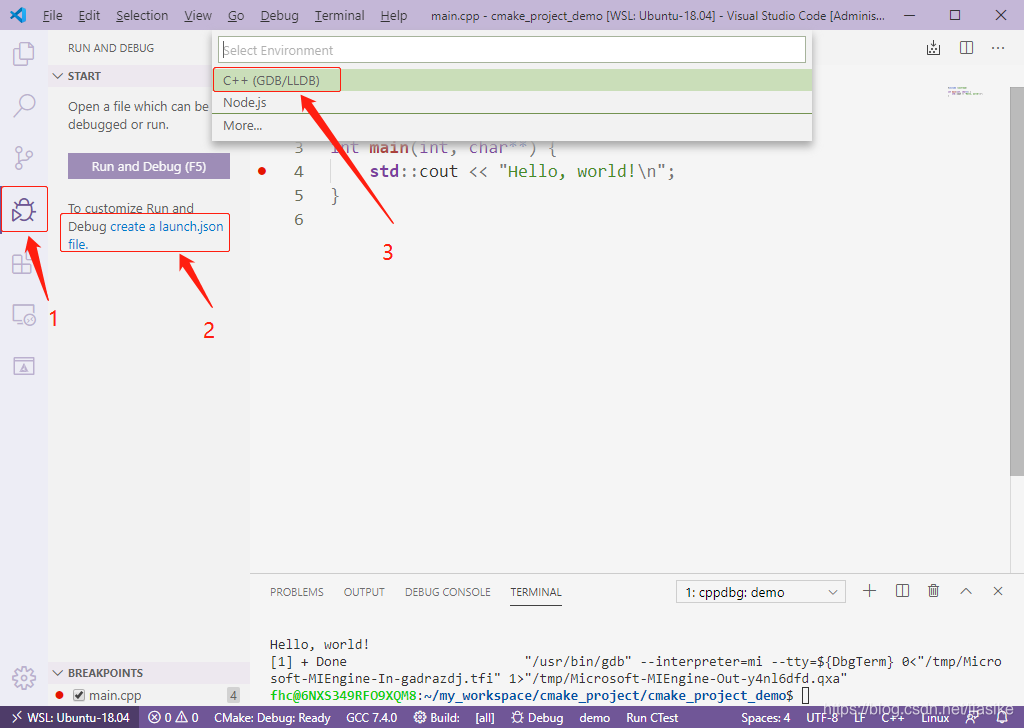

然后就会自动跳入调试界面:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RBBLkGYw-1595251758476)(…/…/…/assets/images/tools/vscode/vscode_cmake_debug_done.png)]

下次进入调试有两种方法:
- 点击VSCode底部的Debug选项
Ctrl+Shift+p在VSCode的命令面板中选择CMake:Debug
5. 设置CMake变量
在.vscode/setting.json文件中可以设置CMake变量,示例如下:
{
"cmake.buildDirectory": "${workspaceRoot}/build/local",
"cmake.buildArgs": [
"--parallel"
],
"cmake.configureOnOpen": false,
"cmake.autoRestartBuild": true,
"C_Cpp.default.configurationProvider": "vector-of-bool.cmake-tools",
"C_Cpp.default.cStandard": "c11",
"C_Cpp.default.cppStandard": "c++17",
"C_Cpp.workspaceParsingPriority": "medium",
}
6. 参考链接
CMake Tools官方文档
更多精彩内容,请关注微信公众号“边缘智能实验室”

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)