一、模块介绍
1.1特点介绍
E3A-DTU-500 是 一款 频率 433M 无 线数传电 台 ( 同时 具有RS232/RS485 接口),透明传输方式,工作在 425~450.5MHz 频段(默认433MHz),工作电压范围 8V~28V。
模块具有软件 FEC 前向纠错算法,其编码效率较高,纠错能力强,在突发干扰的情况下,能主动纠正被干扰的数据包,大大提高可靠性和传输距离。在没有 FEC 的情况下,这种数据包只能被丢弃。
模块具有数据加密和压缩功能。模块在空中传输的数据,具有随机性,通过严密的加解密算法,使得数据截获失去意义。而数据压缩功能有概率减小传输时间,减小受干扰的概率,提高可靠性和传输效率。
| 序号 | 产品特点 | 特点描述 |
| 1 | 超低功耗 | 即空中唤醒功能,降低接收整体功耗: 当模块处于省电模式下即模式 2 时,配置模块的接收响应延时时间可调节模块的整机功耗; 模块可配置的最大接收响应延时为 2000ms。 |
| 2 | 定点发射 | 支持地址功能,主机可发射数据到任意地址、任意信道的模块,达到组网、中继等应用方式: 例如:模块 A 需要向模块 B(地址为 0x00 01,信道为 0x80)发射数据 AA BB CC, 其通信格式为:00 01 80 AA BB CC, 其中 00 01 为模块 B 地址,80 为模块 B 信道, 则模块 B 可以收到 AA BB CC(其它模块不接收数据)。 |
| 3 | 广播监听 | 将模块地址设置为 0xFFFF: 可以监听相同信道上的所以模块的数据传输; 发送的数据,可以被相同信道上任意地址的模块收到,从而起到广播和监听的作用。 |
| 4 | 前向纠错 | 模块具有软件 FEC 前向纠错算法: 其编码效率较高,纠错能力强,在突发干扰的情况下,能主动纠正被干扰的数据包,大大提高可 靠性和传输距离;在没有 FEC 的情况下,这种数据包只能被丢弃。 |
| 5 | 适用环境 | 433M 频率属于免费频段,用户可以免申请直接使用; 与 2.4G 相比,433M 拥有一定的穿透绕射能力,但是空中速率不如 2.4G; 适用于数据量小、传输距离远、易受干扰的环境。 |
| 6 | 看门狗 | 模块内置看门狗,并进行精确时间布局,一旦发生异常,模块将在 0.107 秒内重启,且能继续按照先前的参数设置继续工作。 |
| 更多功能介绍请查看相关应用文档 |
1.2电气参数
| 序号 | 参数名称 | 参数值 | 注释 |
| 1 | 模块尺寸 | 82 * 84 *24mm | 不含天线 |
| 2 | 平均重量 | 135g | 不含天线 |
| 3 | 工作频段 | 425 ~ 450.5MHz | 默认 433MHz,信道数 256,建议 433±5MHz |
| 4 | 生产工艺 | 机贴,无铅工艺 | 无线类产品必须机贴方能保证批量一致性和可靠性 |
| 5 | 接口方式 | RS485:1 * 4 * 3.81 mm RS232:DB9 | 压线方式 标准 DB9,孔式 |
| 6 | 供电电压 | 8 ~ 28V DC | 注意:高于 28V 电压,将导致模块永久损毁 |
| 7 | 通信电平 | RS232/RS485 | 同时具有RS232 和 RS485 |
| 8 | 实测距离 | 4000m | 晴朗空旷,最大功率,天线增益 5dBi,高度 2m,1k 空中速率 |
| 9 | 发射功率 | 最大 27dBm | 约 500mW,4 级可调(27、24、21、18) |
| 10 | 接收灵敏度 | -126dbm@1.2kbps | 接收灵敏度和串口波特率、延迟时间无关 |
| 11 | 空中速率 | 1.2kbps | 8 级可调(1.2、2.4、4.8、9.6、19.2、38.4、50、70kbps) |
| 12 | 休眠电流 | 14mA | 模式 3(电源电压 12V) |
| 13 | 发射电流 | 407mA@20dBm | 电源必须提供 1.5A 以上电流输出能力 |
| 14 | 接收电流 | 28mA | 模式 0 |
| 15 | 通信接口 | RS232/RS485 | 8N1、8E1、8O1,1200~115200 共 8 种波特率(默认 9600) |
| 16 | 驱动方式 | RS232/RS485 | 可设置成推挽/上拉、漏极开路 |
| 17 | 发射长度 | 缓存 512 字节 | 内部自动分包 58 字节发送 |
| 18 | 接收长度 | 缓存 512 字节 | 内部自动分包 58 字节发送 |
| 19 | 模块地址 | 可配置 65536 地址 | 便于组网,支持定点传输、广播传输 |
| 20 | RSSI 支持 | 内置智能化处理 | 无需关心 |
| 21 | 天线接口 | SMA-K | 外螺纹内孔,50 欧姆特性阻抗 |
| 22 | 工作温度 | -40 ~ +85℃ | 工业级 |
| 23 | 工作湿度 | 10% ~ 90% | 相对湿度,无冷凝 |
| 24 | 储存温度 | -40 ~ +125℃ | 工业级 |
1.3系列产品
| 产品型号 | 接口 | 频率 (Hz) | 功率 (dBm) | 距离 (km) | 空中速率 (bps) | 产品特点 |
| E3A-DTU-50 | RS232/RS485 | 433M | 17 | 2.0 | 1.2k~70k | 窄带传输 |
| E3A-DTU-500 | RS232/RS485 | 433M | 27 | 4.0 | 1.2k~70k | 窄带传输 |
| E3A-DTU-1W | RS232/RS485 | 433M | 30 | 6.0 | 1.2k~70k | 窄带传输 |
| E3A 系列的各个型号可以互通,大小功率可以搭配使用 |
1.4常见问题
| 序号 | 问题 | 描述 |
| 1 | 空中速率 | 建议尽可能使用低速,空中速率越高,通信距离越近,丢包率也会越高。 |
| 2 | 天线选择 | 天线和模块必须频率匹配,增益越高越好,驻波比越小越好,建议优先选择吸盘天线。 |
| 3 | 出现乱码 | 一种原因是串口波特率不匹配,另一种原因是电源供电能力不足。 |
| 4 | 延迟过高 | 关闭收发两端的 FEC 纠错功能、提高空中速率都可以减小延迟。 |
| 5 | 接收响应时间 | 只在模式 1、模式 2 下有效,时间设定越长功耗越低,接收延迟也会越高。 |
二、功能简介
2.1引脚定义

| 引脚序号 | 引脚名称 | 引脚用途 |
| 1 | RS232 | 标准 DB9,孔式 |
| 2 | 485_A | 外接其他RS485 设备的 A 端 |
| 3 | 485_B | 外接其他RS485 设备的 B 端 |
| 4 | GND | 地线 |
| 5 | VCC | 电源,默认供电 8~28V(可定制标准 5V 版本),(5 和 6 自动选择高电压一端) |
| 6 | DC8~28V | DC 电源接口(5.5*2.5),接 DC8~28V 电源,(可定制标准 5V 版本) |
| 7 | ANT | 天线接口(SMA-K 外螺纹内孔,50Ω特性阻抗) |
| 8 | PWR | 电源指示灯 |
| 9 | TXD | 发送指示灯 |
| 10 | RXD | 接收指示灯 |
| 11 | M0 | 控制拨码开关(控制工作模式) |
| 12 | M1 | 控制拨码开关(控制工作模式) |
| ★ E3A 各个型号可以互通,大小功率可以搭配使用★ |
2.2连接方法
l RS232 连接方法

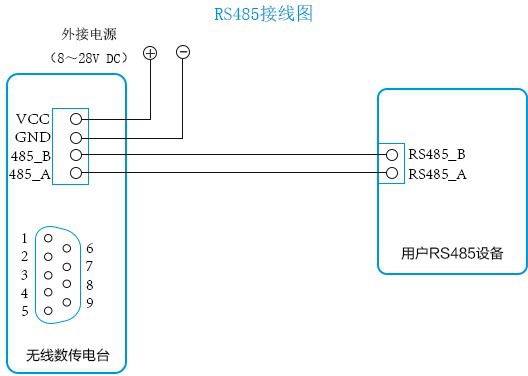
l RS485 连接方法
三、工作模式

| | 类别 | M1 | M0 | 注释 |
| 模式 0 | 一般模式 | On | On | 串口打开,无线打开,透明传输 |
| 模式 1 | 唤醒模式 | On | Off | 空中唤醒发射模式,数据包自带唤醒码 |
| 模式 2 | 省电模式 | Off | On | 空中唤醒接收模式,节省自身接收功耗,该模式不能发射 |
| 模式 3 | 休眠模式 | Off | Off | 模块进入休眠,可以接收参数设置命令 |
四、指令格式
休眠模式(模式 3:M1=Off,M0=Off)下,支持的指令列表如下(设置时,只支持9600,8N1 格式):
| 序号 | 指令格式 | 详细说明 |
| 1 | C0+工作参数 | 16 进制格式发送C0+5 字节工作参数,共 6 字节,必须连续发送(掉电保存) |
| 2 | C1+C1+C1 | 16 进制格式发送三个 C1,模块返回已保存的参数,必须连续发送。 |
| 3 | C2+工作参数 | 16 进制格式发送C2+5 字节工作参数,共 6 字节,必须连续发送(掉电不保存) |
| 4 | C3+C3+C3 | 16 进制格式发送三个 C3,模块返回版本信息,必须连续发送。 |
| 5 | C4+C4+C4 | 16 进制格式发送三个 C4,模块将产生一次复位,必须连续发送。 |
4.1 出厂默认参数
| 型号 | 出厂默认参数值:C0 00 00 18 50 44 |
| 模块型号 | 频率 | 地址 | 信道 | 空中速率 | 波特率 | 串口格式 | 发射功率 |
| E3A-DTU-500 | 433MHz | 0x0000 | 0x50 | 1.2kbps | 9600 | 8N1 | 27dBm |
4.2 参数设置指令
工作参数可以使用 C0 或 C2 命令,其区别是:C0 命令会将参数写入模块 FLASH,掉电保存。
C2 命令为临时修改指令,参数不会掉电保存,适用于需要频繁修改工作参数的场合。例如:C2 00 00 18 50 44。
| 序号 | 名称 | 描述 | 备注 |
| 0 | HEAD | 固定 0xC0 或 0xC2,表示此帧数据为控制命令 | l 必 须 为 0xC0 或 C2 C0:所设置的参数会掉电保存。 C2:所设置的参数不会掉电保存。 |
| 1 | ADDH | 模块地址高字节(默认 00H) | 00H-FFH |
| 2 | ADDL | 模块地址低字节(默认 00H) | 00H-FFH |
| 3 | SPED | 速率参数,包括串口速率和空中速率 7,6:串口校验位 00:8N1(默认) 01:8O1 10:8E1 11:8N1(等同 00) ------------------------------------------------- 5,4,3TTL 串口速率(bps) 000:串口波特率为 1200 001:串口波特率为 2400 010:串口波特率为 4800 011:串口波特率为 9600(默认) 100:串口波特率为 19200 101:串口波特率为 38400 110:串口波特率为 57600 111:串口波特率为 115200 ------------------------------------------------- 2,1,0无线空中速率(bps) 000:空中速率为 1.2k(默认) 001:空中速率为 2.4k 010:空中速率为 4.8k 011:空中速率为 9.6k 100:空中速率为 19.2k 101:空中速率为 38.4k 110:空中速率为 50k 111:空中速率为 70k | l 通信双方串口模式可以不同 --------------------------------------- l 通信双方波特率可以不同 l 串口波特率和无线传输参数无关, 不影响无线收发特性。 ------------------------------------- l 空中速率越低,距离越远,抗干扰性能越强,发送时间越长。 l 通信双方空中无线传输速率必须相同。 |
| 4 | CHAN | 通信频率(425M + CHAN * 0.1M) (默认 50H:433M) | l 00H-FFH,对应 425~450.5MHz |
| 5 | OPTION | 7,定点发送使能位(类 MODBUS) 0: 透明传输模式(默认) 1: 定点传输模式 ------------------------------------------------- 6IO 驱动方式(默认 1) 1:TXD、AUX 推挽输出,RXD 上拉输入 0:TXD、AUX 开路输出,RXD 开路输入 ------------------------------------------------- 5,4,3无线唤醒时间(对接收方来说,是监听间隔时间;对发射方来说,是持续发射唤醒码的时间) 000:250ms(默认) | l 为 1 时,每个用户数据帧的前 3 个字节作为高、低地址、信道。发射时,模块改变自身地址和信道, 完毕后,恢复原有设置。 ------------------------------------- l 该位用于使能模块内部上拉电阻。漏极开路方式电平适应能力更强, 但是某些情况下,可能需要外部上拉电阻 ------------------------------------- l 收发模块都工作在模式 0 下,该延迟时间无效,可以任意值。 l 发射方工作在模式 1,将持续发射 |
| | | 001:500ms 010:750ms 011:1000ms 100:1250ms 101:1500ms 110:1750ms 111:2000ms ------------------------------------------------- 2,FEC 开关 0:关闭 FEC 1:打开 FEC(默认) ------------------------------------------------- 1, 0发射功率(大约值) 00: 27dBm(默认) 01: 24dBm 10: 21dBm 11: 18dBm | 相应时间的唤醒码。 l 接收方工作在模式 2,此时间是指接收方的监听间隔时间(无线唤醒),只能收到工作在模式 1 下发射方的数据。 l 发射方设置的唤醒时间不能小于接收方的监听间隔时间,否则可能丢失数据,当双向通信时,双方可把唤醒时间设置一致。 l 唤醒时间越大平均接收电流越低。 ------------------------------------- l 关闭 FEC 后,数据实际传输速率提升,但抗干扰能力减弱,距离稍近,请根据实际应用选择。 l 通信双方必须都开启或都关闭。 ------------------------------------- l 外部电源必须提供 1.5A 以上电流输出能力。并保证电源纹波小于100mV。 l 不推荐使用较小功率发送,其电源 利用效率不高。 |
| 举例说明(序号 3“SPED”字节的含义): |
| 该字节的二进制位 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 具体值(用户配置) | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| 代表意义 | 串口校验位 8N1 | 串口波特率为 9600 | 空中速率为 1.2k |
| 对应的十六进制 | 1 | 8 |
4.3 工作参数读取
| 指令格式 | 详细说明 |
| C1+C1+C1 | 在休眠模式下,用户向模块串口发出命令(HEX 格式):C1 C1 C1, 模块会返回当前的配置参数,比如:C0 00 00 18 50 44。 |
4.4 版本号读取
| 指令格式 | 详细说明 |
| C3+C3+C3 | 在休眠模式下,用户向模块串口发出命令(HEX 格式):C3 C3 C3, 模块会返回当前的配置参数,比如:C3 30 xx yy。 此处的 30 代表模块型号(E30 系列),xx 就是版本号,yy 代指模块其他特性。 |
4.5 复位指令
| 指令格式 | 详细说明 |
| C4+C4+C4 | 在休眠模式下,用户向模块串口发出命令(HEX 格式):C4 C4 C4,模块将产生一次复位。复位过程中,模块进行自检,AUX 输出低电平,复位完毕后,AUX 输出高电平,模块开始 正常工作。此时,可以进行模式切换或发起下一条指令。 |
五. 参数配置
| 步骤 | 操作 | 详细说明 |
| 1 | 安装驱动 | 请先安装资料包中USB 转接板驱动程序(CP2102)。 |
| 2 | 拨码开关 | 拨动拨码开关进入休眠模式。 (M1=Off,M0=Off) |
| 3 | 连接模块 | 将数传电台与USB 转接板连接; 然后将转接板插入电脑USB 口。 |
| 4 | 连接电源 | 请务必保证已连接外置电源(8~28V)。 |
| 5 | 打开串口 | 打开我司的参数配置软件,选择相应的串口号然后点击“打开串口”; 如果打开失败,请选择其它串口号再试直到打开成功; |
| 6 | 进入界面 | 点击“读取模块参数”,界面如下图所示; 如果读取成功,则软件会显示模块的当前配置; 如果读取失败,请检查模块是否处于命令模式,或是否已安装转接板驱动程序。 |
| 7 | 写入参数 | 根据需要更改相应配置,请调整需要修改的参数; 然后点击“写入”按钮,把新参数写入到模块。 |
| 8 | 完成操作 | 如果需要重新配置请按“第五步”操作; 如果配置完成请先点击“关闭串口”然后取下模块。 |
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)