“一叶障目,不见泰山”。在研究四旋翼飞行器之前,有必要从整体介绍其工作原理、主要部件、技术名词等基础知识。不然就像羊入虎口,陷入一大堆不同层次的资料,难觅出口。接下我就抛砖引玉,尽自己所能,介绍四旋翼的工作原理和主要部件。余虽不敏,然余诚也。
工作原理
四旋翼飞行器,通过4个对称布置的电机,改变螺旋桨的转速,实现升力的变化,进而控制飞行器的姿态和位置。姿态具体指3个欧拉角:横滚(Roll)、俯仰(Pitch)、偏航(Yaw)。位置具体指1个高度油门(Throttle)和2个位置(X和Y)。欧拉角是一种描述物体姿态的常见方式,广泛应用于惯性导航、机器人等领域。为了方便大家理解,在网上找了3个欧拉角的动图,分别为Roll、Pitch、Yaw,让我们致敬制作者3秒钟。
横滚:Roll,控制四旋翼左右运动。
俯仰:Pitch,控制四旋翼前后运动。
偏航:Yaw,控制四旋翼的朝向。
无人机的姿态和位置共有6个自由度,每个自由度的控制如下图所示。4个电机2个正转(电机2和4),2个反转(电机1和3),对称布置。电机正反转配合正反桨,可使螺旋桨的风都往下刮以平衡重力,同时抵消因桨叶旋转带来的空气阻力扭矩。由于输入只有4个自由度,因此多出的2个自由度是不完全受控的,其中俯仰运动和前后运动耦合,滚转运动和侧向运动耦合。
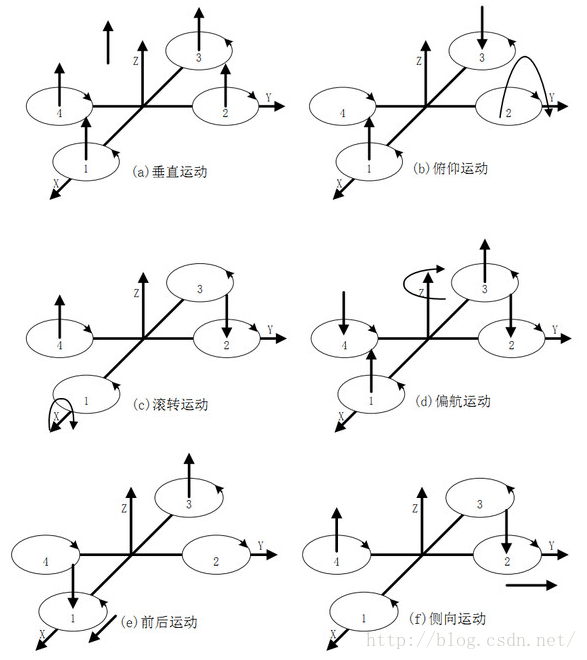
坐标系:标准右手系。规定X轴正方向为前向。螺旋桨的箭头向上↑:电机转速上升。螺旋桨的箭头向下↓:电机转速下降。
(a) 垂直运动(Throttle):4个电机均加大马力,螺旋桨产生的升力大于重力,飞机便垂直上升。当升力与重力平衡时,飞机便悬停。悬停是考验算法的重要一环,靠的是PID不断反馈,调整转速。
(b) 俯仰运动(Pitch):电机1加大马力,电机3减小马力,二者的变化量相同。1处升力变大,3处升力减小,重力仍保持平衡,但对Y轴产生一个力矩,机身绕Y轴旋转,实现俯仰。
(c) 滚转运动(Roll):与 (b) 原理相同,只是Y轴换成了X轴。
(d) 偏航运动(Yaw):电机1、3加大马力,电机2、4减小马力,二者的变化量相同。重力和绕X、Y轴的扭矩仍保持平衡,但要注意的是,根据作用力和反作用力原理,由于2个正转的速度>2个反转的速度,空气阻力产生的扭矩不平衡了,使得机身绕Z轴旋转,实现偏航。
(e) 前后运动:与 (b) 耦合,机身绕Y轴旋转一定角度后,使得升力沿水平方向有了分量,实现前后运动。
(f) 侧向运动:与 (c) 耦合,原理与 (e) 相同。
如果有朋友接触过麦克纳姆轮,也称“全向轮”,那就更容易理解四旋翼的工作原理了。麦克纳姆轮通过4个对称布置的电机和轮盘,可实现车身水平任意方向的移动和原地旋转,无比灵活。

主要部件
以S500为例,S500是一架入门级的四旋翼飞机,这里的500指的是轴距(对角2个电机之间的距离),单位 :mm。对于开源爱好者而言,如果想一站式玩四旋翼,在某宝上选购一架S500是个不错的选择。下面我就从上表出发,详细介绍四旋翼的主要部件和技术名词。
四旋翼本体
四旋翼分2种模式,1种是+模式:飞行方向(机头)与旋翼重合;1种是X模式:飞行方向(机头)平分旋翼。
+模式:直观,简单,驱动弱,调参容易。
X模式:复杂,稳定,驱动好,调参麻烦。
对于四旋翼,稳定和驱动是第一位的,调参可以站在巨人的肩膀上,因此一般采用X模式。
飞行控制器
飞行控制器简称飞控,是无人机的大脑。目前主要分开源和闭源两派,开源飞控的鼻祖来自Arduino,著名的WMC飞控和APM飞控都是Arduino飞控的直接衍生品,APM全称ArduPilotMega,其中的Ardu代表的就是Arduino。APM飞控是目前成熟度最高的开源飞控,但由于容量和计算量有限,在不久的将来一定会被更强大的PIX4、PIXHAWK所超越,成为一个时代的缩影。还有一些较为初级的飞控,如KK、QQ、玉兔等,在这就不赘述了。闭源飞控主要由商业公司推出,如DJI的工业级飞控A2、A3,入门级飞控Naza系列,还有零度的S4、X4和双子星GEMINI。值得一提是其中的双子星,是国内首个双余度安全飞行控制系统。随着安全性的重视和提高,冗余度设计也将成为无人机的标配。
螺旋桨
4个螺旋桨,2正桨(顺时针转)2反桨(逆时针转),正反桨的风都向下吹,正反的目的主要是抵消螺旋桨的自旋。安装的时候,无论正反桨,有字的一面均向上。桨型中1045这4位数字,前2位10代表桨的直径(单位:英寸inch),后2位45代表桨的角度(单位:度°)。
电机
4个无刷电机,2正转2反转。2212这4位数字,前2位22代表电机转子直径,后2位12代表电机转子高度,单位:毫米mm,注意均指电机转子而非外壳。如果大家留心的话,电机外壳上一般会并注明这4位数字,除此之外,还会看到一个KV值,代表外加1V电压时电机每分钟空转转速。如“KV:900”代表外加1V电压时,电机空转时每分钟转900圈。常见的电机品牌有新西达(XXD)、朗宇(SunnySky)等,并且很多外壳上会有一串神秘字符:MADE IN CHINA。
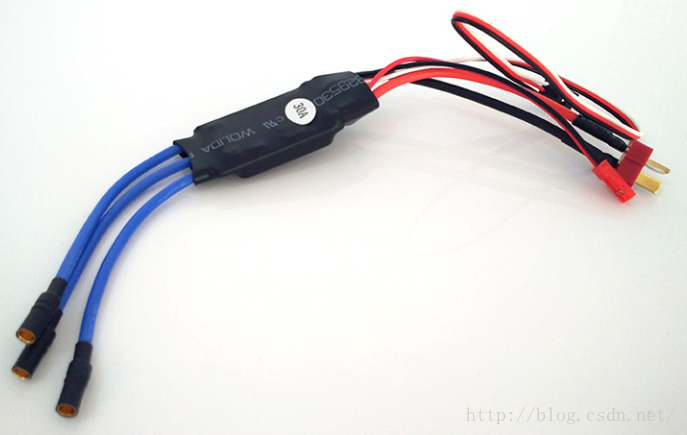
电调
说完电机说电调,电调和电机配套使用,是飞控和电机之间的桥梁。电调全称电子调速器(Electronic Speed Control),负责将飞控的控制信号(PWM波)转变为电流的大小,进而控制电机转速。除了明面上的转换功能,还能承载电机所需的大电流,以及将11.1V转为5V供飞控和遥控模块使用(BEC输出)。电调的主要参数是电流输出能力,单位A,如30A代表电调能提供的最大电流为30A。常见的电调品牌有新西达(XXD)、中特威(ZTW)、好盈(HobbyWing)等。
电池
一般为锂电池,因为同等电池容量锂电池最轻。大家可以看到有3个参数:3200mAh 11.1V 30c。和手机电池一样,3200mAh代表以3200mA电流放电,可持续1小时。11.1V代表电压,一般由3节标准锂电池组成(3.7V×3=11.1V),相应标识为3S。30c代表放电能力,在航模中是个重要参数,意味着可以3200mA×30的电流强度放电。说完了放电,还有充电,一般为2c充电,即充电电流可为3200mA×2。由于航模锂电池采用多节标准锂电池组成,而各节标准锂电池之间存在充放电性能差异,因此充电器一般采用平衡充,避免某节电池过充。
遥控器
主要分美国手和日门手,美国手的油门在左边,日本手的油门在右边。在四旋翼的控制中,一般采用美国手。怎么判断油门呢?很简单,遥控器左右2个摇杆中,推上去不回弹的是油门。也很好理解,油门一般稳定在一个位置就好了,回弹的话飞手会流泪。遥控器中也有1个神秘数字,6代表6通道,即遥控器可控的动作路数。因为四旋翼有4个自由度,所以遥控器至少需要4通道,剩余的通道用于控制飞行模式等。
至此四旋翼的主要部件和技术名词介绍完毕,还有一些可选部件,如数传、OSD、云台、相机、图传等,待大家入门后即可自行挖掘。最后附上一个Exciting的TED视频,震撼你的眼球。
拉菲罗·安德烈:四轴飞行器灵活的运动性。
PS: 无人机系列的第2篇至此结束,接下来就会进入正题——APM飞控。欲知后事如何,且看下回分解。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)