MVSNet通过将相机几何参数编码到网络中,实现了端到端的多视角三维重建,并在性能和视觉效果上超越了先前算法,并在eccv2018 oral中发表。
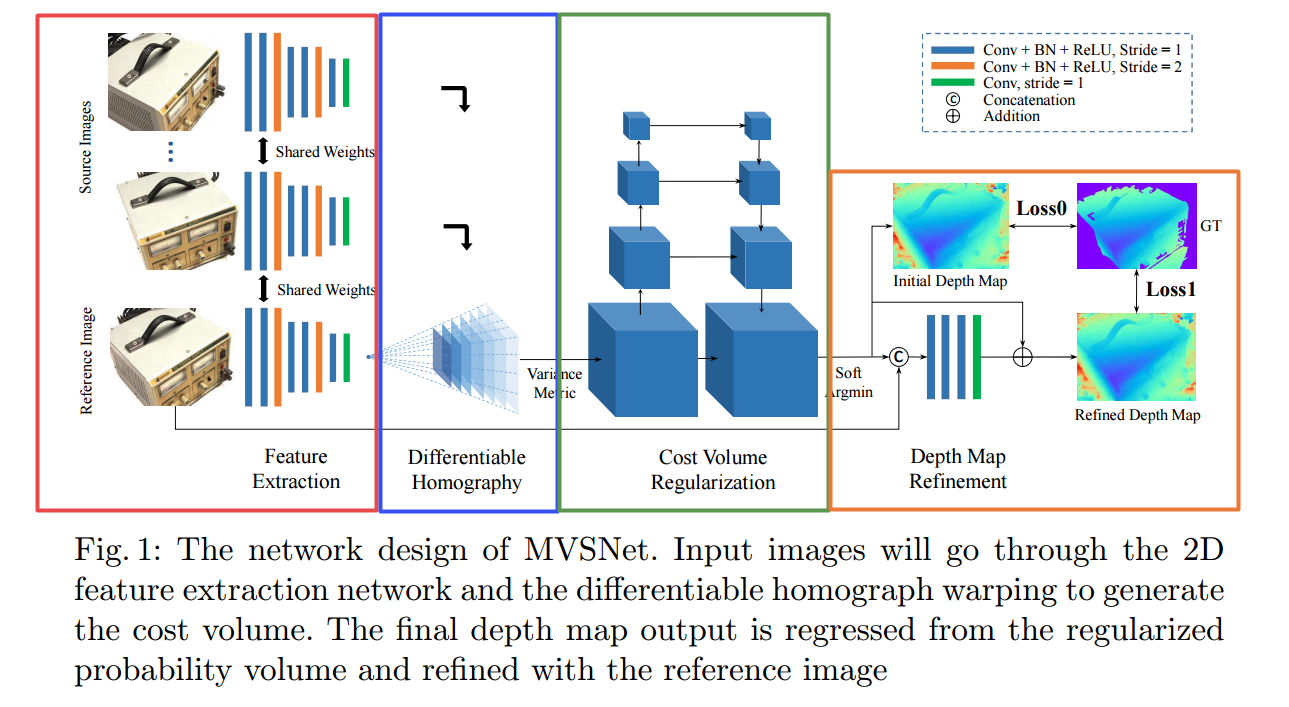
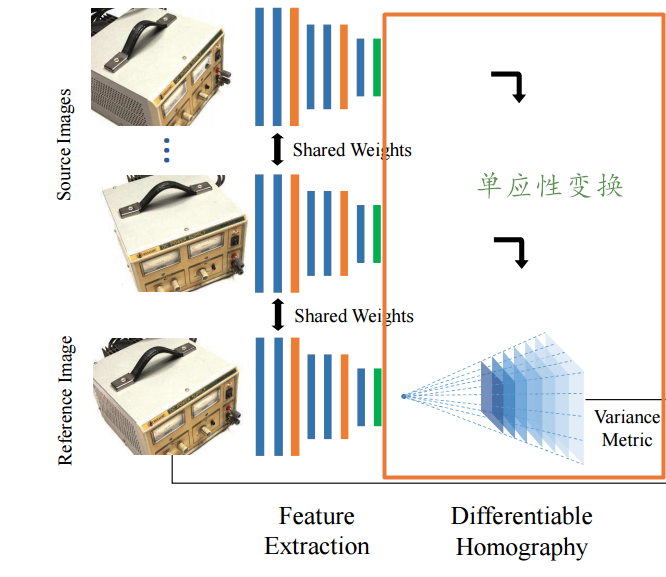
模型主要包含四个主要步骤:图像特征抽取、多视角可微单应性变换、cost volume构建和正则化、深度估计与深度优化。更多算法和实现过程中的细节分析,请参看代码MVSNet的 ? 论文解读
其代码使用tensorflow实现,包含了训练和测试模块,由Yaoyao开发。
MVSNet
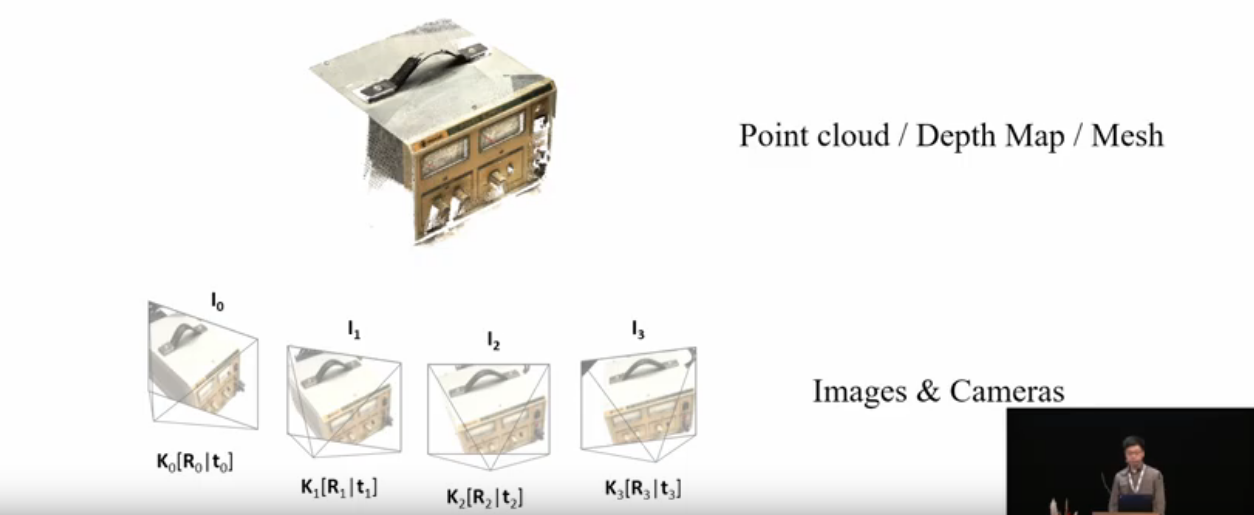
首先回顾一下MVSNet的目标任务和模型结构,其任务是通过对视角图像重建出目标的三维表示。
其模型结构包含了四个部分,分别是特征抽取、单应性变换、代价空间构造和深度图估计与优化。它的主要贡献在与三个方面:
- 一是利用可微的单应性变换将多个参考视图的图像特征变换到了参考图像视角下的不同深度上,并基于此构建cost volume实现了端到端的训练;
- 二是将三维重建问题分解为了对应视角下的深度估计问题,使得大规模的多视角三维重建成为可能;
- 三是利用基于方差的cost metric实现了对于任意视角图像数量的有效处理。
2.代码结构分析
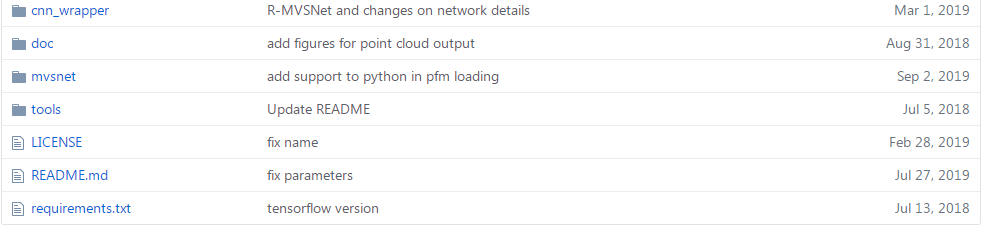
这一工作对应的源码主要包含了以下仨个文件夹,其中mvsnet/为网络的实现训练测试部分,tools/common.py内部包含了各种工具函数,cnn_warpper/network.py mvsnet.py则包含了各种cnn操作和子模块实现函数:
如果要快速上手使用可以在下载代码配置好后运行:
cd MVSNet/mvsnet
python train.py --regularization '3DCNNs'
? 我们先来分析训练代码MVSNet/mvsnet/train.py的构造:
class MVSGenerator:
""" data generator class, tf only accept generator without param """
def __init__(self, sample_list, view_num):
self.sample_list = sample_list
self.view_num = view_num
self.sample_num = len(sample_list)
self.counter = 0
def __iter__(self):
while True:
for data in self.sample_list:
start_time = time.time()
images = []
cams = []
for view in range(self.view_num):
image = center_image(cv2.imread(data[2 * view]))
cam = load_cam(open(data[2 * view + 1]))
cam[1][3][1] = cam[1][3][1] * FLAGS.interval_scale
images.append(image)
cams.append(cam)
depth_image = load_pfm(open(data[2 * self.view_num]))
depth_start = cams[0][1, 3, 0] + cams[0][1, 3, 1]
depth_end = cams[0][1, 3, 0] + (FLAGS.max_d - 2) * cams[0][1, 3, 1]
depth_image = mask_depth_image(depth_image, depth_start, depth_end)
self.counter += 1
duration = time.time() - start_time
images = np.stack(images, axis=0)
cams = np.stack(cams, axis=0)
print('Forward pass: d_min = %f, d_max = %f.' % \
(cams[0][1, 3, 0], cams[0][1, 3, 0] + (FLAGS.max_d - 1) * cams[0][1, 3, 1]))
yield (images, cams, depth_image)
if FLAGS.regularization == 'GRU':
self.counter += 1
start_time = time.time()
cams[0][1, 3, 0] = cams[0][1, 3, 0] + (FLAGS.max_d - 1) * cams[0][1, 3, 1]
cams[0][1, 3, 1] = -cams[0][1, 3, 1]
duration = time.time() - start_time
print('Back pass: d_min = %f, d_max = %f.' % \
(cams[0][1, 3, 0], cams[0][1, 3, 0] + (FLAGS.max_d - 1) * cams[0][1, 3, 1]))
yield (images, cams, depth_image)
def average_gradients(tower_grads):
"""Calculate the average gradient for each shared variable across all towers.
Note that this function provides a synchronization point across all towers.
Args:
tower_grads: List of lists of (gradient, variable) tuples. The outer list
is over individual gradients. The inner list is over the gradient
calculation for each tower.
Returns:
List of pairs of (gradient, variable) where the gradient has been averaged
across all towers.
"""
average_grads = []
for grad_and_vars in zip(*tower_grads):
grads = []
for g, _ in grad_and_vars:
expanded_g = tf.expand_dims(g, 0)
grads.append(expanded_g)
grad = tf.concat(axis=0, values=grads)
grad = tf.reduce_mean(grad, 0)
v = grad_and_vars[0][1]
grad_and_var = (grad, v)
average_grads.append(grad_and_var)
return average_grads
def train(traning_list):
""" training mvsnet """
training_sample_size = len(traning_list)
if FLAGS.regularization == 'GRU':
training_sample_size = training_sample_size * 2
print ('sample number: ', training_sample_size)
with tf.Graph().as_default(), tf.device('/cpu:0'):
training_generator = iter(MVSGenerator(traning_list, FLAGS.view_num))
generator_data_type = (tf.float32, tf.float32, tf.float32)
training_set = tf.data.Dataset.from_generator(lambda: training_generator, generator_data_type)
training_set = training_set.batch(FLAGS.batch_size)
training_set = training_set.prefetch(buffer_size=1)
training_iterator = training_set.make_initializable_iterator()
global_step = tf.Variable(0, trainable=False, name='global_step')
lr_op = tf.train.exponential_decay(FLAGS.base_lr, global_step=global_step,
decay_steps=FLAGS.stepvalue, decay_rate=FLAGS.gamma, name='lr')
opt = tf.train.RMSPropOptimizer(learning_rate=lr_op)
tower_grads = []
for i in xrange(FLAGS.num_gpus):
with tf.device('/gpu:%d' % i):
with tf.name_scope('Model_tower%d' % i) as scope:
images, cams, depth_image = training_iterator.get_next()
images.set_shape(tf.TensorShape([None, FLAGS.view_num, None, None, 3]))
cams.set_shape(tf.TensorShape([None, FLAGS.view_num, 2, 4, 4]))
depth_image.set_shape(tf.TensorShape([None, None, None, 1]))
depth_start = tf.reshape(
tf.slice(cams, [0, 0, 1, 3, 0], [FLAGS.batch_size, 1, 1, 1, 1]), [FLAGS.batch_size])
depth_interval = tf.reshape(
tf.slice(cams, [0, 0, 1, 3, 1], [FLAGS.batch_size, 1, 1, 1, 1]), [FLAGS.batch_size])
is_master_gpu = False
if i == 0:
is_master_gpu = True
if FLAGS.regularization == '3DCNNs':
depth_map, prob_map = inference(
images, cams, FLAGS.max_d, depth_start, depth_interval, is_master_gpu)
if FLAGS.refinement:
ref_image = tf.squeeze(
tf.slice(images, [0, 0, 0, 0, 0], [-1, 1, -1, -1, 3]), axis=1)
refined_depth_map = depth_refine(depth_map, ref_image,
FLAGS.max_d, depth_start, depth_interval, is_master_gpu)
else:
refined_depth_map = depth_map
loss0, less_one_temp, less_three_temp = mvsnet_regression_loss(
depth_map, depth_image, depth_interval)
loss1, less_one_accuracy, less_three_accuracy = mvsnet_regression_loss(
refined_depth_map, depth_image, depth_interval)
loss = (loss0 + loss1) / 2
with tf.Session(config=config) as sess:
total_step = 0
sess.run(init_op)
summary_writer = tf.summary.FileWriter(FLAGS.log_dir, sess.graph)
for epoch in range(FLAGS.epoch):
step = 0
sess.run(training_iterator.initializer)
for _ in range(int(training_sample_size / FLAGS.num_gpus)):
start_time = time.time()
try:
out_summary_op, out_opt, out_loss, out_less_one, out_less_three = sess.run(
[summary_op, train_opt, loss, less_one_accuracy, less_three_accuracy])
except tf.errors.OutOfRangeError:
print("End of dataset")
break
duration = time.time() - start_time
if step % FLAGS.display == 0:
print(Notify.INFO,
'epoch, %d, step %d, total_step %d, loss = %.4f, (< 1px) = %.4f, (< 3px) = %.4f (%.3f sec/step)' %
(epoch, step, total_step, out_loss, out_less_one, out_less_three, duration), Notify.ENDC)
if step % (FLAGS.display * 10) == 0:
summary_writer.add_summary(out_summary_op, total_step)
if (total_step % FLAGS.snapshot == 0 or step == (training_sample_size - 1)):
model_folder = os.path.join(FLAGS.model_dir, FLAGS.regularization)
if not os.path.exists(model_folder):
os.mkdir(model_folder)
ckpt_path = os.path.join(model_folder, 'model.ckpt')
print(Notify.INFO, 'Saving model to %s' % ckpt_path, Notify.ENDC)
saver.save(sess, ckpt_path, global_step=total_step)
step += FLAGS.batch_size * FLAGS.num_gpus
total_step += FLAGS.batch_size * FLAGS.num_gpus
?其中的主要操作是来自与model.py的函数,包括inference 和depth_refine以及计算损失的mvsnet_regression_loss,下面我们分别来分析这三个函数:
def inference(images, cams, depth_num, depth_start, depth_interval, is_master_gpu=True):
""" infer depth image from multi-view images and cameras """
depth_end = depth_start + (tf.cast(depth_num, tf.float32) - 1) * depth_interval
ref_image = tf.squeeze(tf.slice(images, [0, 0, 0, 0, 0], [-1, 1, -1, -1, 3]), axis=1)
ref_cam = tf.squeeze(tf.slice(cams, [0, 0, 0, 0, 0], [-1, 1, 2, 4, 4]), axis=1)
if is_master_gpu:
ref_tower = UNetDS2GN({'data': ref_image}, is_training=True, reuse=False)
else:
ref_tower = UNetDS2GN({'data': ref_image}, is_training=True, reuse=True)
view_towers = []
for view in range(1, FLAGS.view_num):
view_image = tf.squeeze(tf.slice(images, [0, view, 0, 0, 0], [-1, 1, -1, -1, -1]), axis=1)
view_tower = UNetDS2GN({'data': view_image}, is_training=True, reuse=True)
view_towers.append(view_tower)
view_homographies = []
for view in range(1, FLAGS.view_num):
view_cam = tf.squeeze(tf.slice(cams, [0, view, 0, 0, 0], [-1, 1, 2, 4, 4]), axis=1)
homographies = get_homographies(ref_cam, view_cam, depth_num=depth_num,
depth_start=depth_start, depth_interval=depth_interval)
view_homographies.append(homographies)
with tf.name_scope('cost_volume_homography'):
depth_costs = []
for d in range(depth_num):
ave_feature = ref_tower.get_output()
ave_feature2 = tf.square(ref_tower.get_output())
for view in range(0, FLAGS.view_num - 1):
homography = tf.slice(view_homographies[view], begin=[0, d, 0, 0], size=[-1, 1, 3, 3])
homography = tf.squeeze(homography, axis=1)
warped_view_feature = tf_transform_homography(view_towers[view].get_output(), homography)
ave_feature = ave_feature + warped_view_feature
ave_feature2 = ave_feature2 + tf.square(warped_view_feature)
ave_feature = ave_feature / FLAGS.view_num
ave_feature2 = ave_feature2 / FLAGS.view_num
cost = ave_feature2 - tf.square(ave_feature)
depth_costs.append(cost)
cost_volume = tf.stack(depth_costs, axis=1)
if is_master_gpu:
filtered_cost_volume_tower = RegNetUS0({'data': cost_volume}, is_training=True, reuse=False)
else:
filtered_cost_volume_tower = RegNetUS0({'data': cost_volume}, is_training=True, reuse=True)
filtered_cost_volume = tf.squeeze(filtered_cost_volume_tower.get_output(), axis=-1)
with tf.name_scope('soft_arg_min'):
probability_volume = tf.nn.softmax(
tf.scalar_mul(-1, filtered_cost_volume), axis=1, name='prob_volume')
volume_shape = tf.shape(probability_volume)
soft_2d = []
for i in range(FLAGS.batch_size):
soft_1d = tf.linspace(depth_start[i], depth_end[i], tf.cast(depth_num, tf.int32))
soft_2d.append(soft_1d)
soft_2d = tf.reshape(tf.stack(soft_2d, axis=0), [volume_shape[0], volume_shape[1], 1, 1])
soft_4d = tf.tile(soft_2d, [1, 1, volume_shape[2], volume_shape[3]])
estimated_depth_map = tf.reduce_sum(soft_4d * probability_volume, axis=1)
estimated_depth_map = tf.expand_dims(estimated_depth_map, axis=3)
prob_map = get_propability_map(probability_volume, estimated_depth_map, depth_start, depth_interval)
return estimated_depth_map, prob_map
?紧接着需要对上一步基于概率volume得到的深度进行refine。由于在正则化阶段较大的感受野使得重建的边缘过于平滑,这就需要从参考图像中获取边缘信息来优化这些区域的精度。优化阶段使用了深度残差网络来进行,输入为上一步估计的初始深度+参考图像的4通道,通过三个32通道的二维卷积和一个单通道的卷积(最后一层输出残差,不加激活和BN),并与初始深度相加得到优化后的深度(为了避免深度的尺度效应,统一归一化到0-1而后又在优化后重新计算回来)。
def depth_refine(init_depth_map, image, depth_num, depth_start, depth_interval, is_master_gpu=True):
""" refine depth image with the image
先对深度图进行归一化
再对参考图像进行尺度缩放1/4
再利用残差网络计算残差
最后恢复正常深度
"""
depth_shape = tf.shape(init_depth_map)
depth_end = depth_start + (tf.cast(depth_num, tf.float32) - 1) * depth_interval
depth_start_mat = tf.tile(tf.reshape(
depth_start, [depth_shape[0], 1, 1, 1]), [1, depth_shape[1], depth_shape[2], 1])
depth_end_mat = tf.tile(tf.reshape(
depth_end, [depth_shape[0], 1, 1, 1]), [1, depth_shape[1], depth_shape[2], 1])
depth_scale_mat = depth_end_mat - depth_start_mat
init_norm_depth_map = tf.div(init_depth_map - depth_start_mat, depth_scale_mat)
resized_image = tf.image.resize_bilinear(image, [depth_shape[1], depth_shape[2]])
if is_master_gpu:
norm_depth_tower = RefineNet({'color_image': resized_image, 'depth_image': init_norm_depth_map},
is_training=True, reuse=False)
else:
norm_depth_tower = RefineNet({'color_image': resized_image, 'depth_image': init_norm_depth_map},
is_training=True, reuse=True)
norm_depth_map = norm_depth_tower.get_output()
refined_depth_map = tf.multiply(norm_depth_map, depth_scale_mat) + depth_start_mat
return refined_depth_map
class RefineNet(Network):
"""network for depth map refinement using original image."""
def setup(self):
(self.feed('color_image', 'depth_image')
.concat(axis=3, name='concat_image'))
(self.feed('concat_image')
.conv_bn(3, 32, 1, name='refine_conv0')
.conv_bn(3, 32, 1, name='refine_conv1')
.conv_bn(3, 32, 1, name='refine_conv2')
.conv(3, 1, 1, relu=False, name='refine_conv3'))
(self.feed('refine_conv3', 'depth_image')
.add(name='refined_depth_image'))
?最后我们来一起看一下整个模型的损失函数mvsnet/loss.py,包括初始深度损失和优化后的深度损失两部分,这两部分都仅仅对于基准图像中存在的点进行计算,λ取值为1:

loss0, less_one_temp, less_three_temp = mvsnet_regression_loss(
depth_map, depth_image, depth_interval)
loss1, less_one_accuracy, less_three_accuracy = mvsnet_regression_loss(
refined_depth_map, depth_image, depth_interval)
loss = (loss0 + loss1) / 2
def mvsnet_regression_loss(estimated_depth_image, depth_image, depth_interval):
""" compute loss and accuracy """
masked_mae = non_zero_mean_absolute_diff(depth_image, estimated_depth_image, depth_interval)
less_one_accuracy = less_one_percentage(depth_image, estimated_depth_image, depth_interval)
less_three_accuracy = less_three_percentage(depth_image, estimated_depth_image, depth_interval)
return masked_mae, less_one_accuracy, less_three_accuracy
def non_zero_mean_absolute_diff(y_true, y_pred, interval):
""" non zero mean absolute loss for one batch """
with tf.name_scope('MAE'):
shape = tf.shape(y_pred)
interval = tf.reshape(interval, [shape[0]])
mask_true = tf.cast(tf.not_equal(y_true, 0.0), dtype='float32')
denom = tf.reduce_sum(mask_true, axis=[1, 2, 3]) + 1e-7
masked_abs_error = tf.abs(mask_true * (y_true - y_pred))
masked_mae = tf.reduce_sum(masked_abs_error, axis=[1, 2, 3])
masked_mae = tf.reduce_sum((masked_mae / interval) / denom)
return masked_mae
def less_one_percentage(y_true, y_pred, interval):
""" less one accuracy for one batch """
with tf.name_scope('less_one_error'):
shape = tf.shape(y_pred)
mask_true = tf.cast(tf.not_equal(y_true, 0.0), dtype='float32')
denom = tf.reduce_sum(mask_true) + 1e-7
interval_image = tf.tile(tf.reshape(interval, [shape[0], 1, 1, 1]), [1, shape[1], shape[2], 1])
abs_diff_image = tf.abs(y_true - y_pred) / interval_image
less_one_image = mask_true * tf.cast(tf.less_equal(abs_diff_image, 1.0), dtype='float32')
return tf.reduce_sum(less_one_image) / denom
def less_three_percentage(y_true, y_pred, interval):
""" less three accuracy for one batch """
with tf.name_scope('less_three_error'):
shape = tf.shape(y_pred)
mask_true = tf.cast(tf.not_equal(y_true, 0.0), dtype='float32')
denom = tf.reduce_sum(mask_true) + 1e-7
interval_image = tf.tile(tf.reshape(interval, [shape[0], 1, 1, 1]), [1, shape[1], shape[2], 1])
abs_diff_image = tf.abs(y_true - y_pred) / interval_image
less_three_image = mask_true * tf.cast(tf.less_equal(abs_diff_image, 3.0), dtype='float32')
return tf.reduce_sum(less_three_image) / denom
3.可微单应性变换
整篇文章的核心在于可微的单应性变换,将不同视角下图像特征转化到参考图像视角下的不同深度上去。
将第i个视角的特征Fi变换到对应深度的Vi(d)上去需要计算单应性变换矩阵Hi(d):

在前面的model.py中已经在inference()有过使用,具体是mvsnet/homography_warping.py中的get_homographies & tf_transform_homography两个函数:
def get_homographies(left_cam, right_cam, depth_num, depth_start, depth_interval):
with tf.name_scope('get_homographies'):
R_left = tf.slice(left_cam, [0, 0, 0, 0], [-1, 1, 3, 3])
R_right = tf.slice(right_cam, [0, 0, 0, 0], [-1, 1, 3, 3])
t_left = tf.slice(left_cam, [0, 0, 0, 3], [-1, 1, 3, 1])
t_right = tf.slice(right_cam, [0, 0, 0, 3], [-1, 1, 3, 1])
K_left = tf.slice(left_cam, [0, 1, 0, 0], [-1, 1, 3, 3])
K_right = tf.slice(right_cam, [0, 1, 0, 0], [-1, 1, 3, 3])
depth_num = tf.reshape(tf.cast(depth_num, 'int32'), [])
depth = depth_start + tf.cast(tf.range(depth_num), tf.float32) * depth_interval
num_depth = tf.shape(depth)[0]
K_left_inv = tf.matrix_inverse(tf.squeeze(K_left, axis=1))
R_left_trans = tf.transpose(tf.squeeze(R_left, axis=1), perm=[0, 2, 1])
R_right_trans = tf.transpose(tf.squeeze(R_right, axis=1), perm=[0, 2, 1])
fronto_direction = tf.slice(tf.squeeze(R_left, axis=1), [0, 2, 0], [-1, 1, 3])
c_left = -tf.matmul(R_left_trans, tf.squeeze(t_left, axis=1))
c_right = -tf.matmul(R_right_trans, tf.squeeze(t_right, axis=1))
c_relative = tf.subtract(c_right, c_left)
batch_size = tf.shape(R_left)[0]
temp_vec = tf.matmul(c_relative, fronto_direction)
depth_mat = tf.tile(tf.reshape(depth, [batch_size, num_depth, 1, 1]), [1, 1, 3, 3])
temp_vec = tf.tile(tf.expand_dims(temp_vec, axis=1), [1, num_depth, 1, 1])
middle_mat0 = tf.eye(3, batch_shape=[batch_size, num_depth]) - temp_vec / depth_mat
middle_mat1 = tf.tile(tf.expand_dims(tf.matmul(R_left_trans, K_left_inv), axis=1), [1, num_depth, 1, 1])
middle_mat2 = tf.matmul(middle_mat0, middle_mat1)
homographies = tf.matmul(tf.tile(K_right, [1, num_depth, 1, 1])
, tf.matmul(tf.tile(R_right, [1, num_depth, 1, 1])
, middle_mat2))
def tf_transform_homography(input_image, homography):
homography = tf.reshape(homography, [-1, 9])
a0 = tf.slice(homography, [0, 0], [-1, 1])
a1 = tf.slice(homography, [0, 1], [-1, 1])
a2 = tf.slice(homography, [0, 2], [-1, 1])
b0 = tf.slice(homography, [0, 3], [-1, 1])
b1 = tf.slice(homography, [0, 4], [-1, 1])
b2 = tf.slice(homography, [0, 5], [-1, 1])
c0 = tf.slice(homography, [0, 6], [-1, 1])
c1 = tf.slice(homography, [0, 7], [-1, 1])
c2 = tf.slice(homography, [0, 8], [-1, 1])
a_0 = a0 - c0 / 2
a_1 = a1 - c1 / 2
a_2 = (a0 + a1) / 2 + a2 - (c0 + c1) / 4 - c2 / 2
b_0 = b0 - c0 / 2
b_1 = b1 - c1 / 2
b_2 = (b0 + b1) / 2 + b2 - (c0 + c1) / 4 - c2 / 2
c_0 = c0
c_1 = c1
c_2 = c2 + (c0 + c1) / 2
homo = []
homo.append(a_0)
homo.append(a_1)
homo.append(a_2)
homo.append(b_0)
homo.append(b_1)
homo.append(b_2)
homo.append(c_0)
homo.append(c_1)
homo.append(c_2)
homography = tf.stack(homo, axis=1)
homography = tf.reshape(homography, [-1, 9])
homography_linear = tf.slice(homography, begin=[0, 0], size=[-1, 8])
homography_linear_div = tf.tile(tf.slice(homography, begin=[0, 8], size=[-1, 1]), [1, 8])
homography_linear = tf.div(homography_linear, homography_linear_div)
warped_image = tf.contrib.image.transform(
input_image, homography_linear, interpolation='BILINEAR')
return warped_image
?最后详细说明一下几个重要的函数,其中打包了模型的基础操作子、子函数和IO等。
cnn_wrapper/network.py:包含了基本的NetWork基类,其中实现了conv cov_bn conv_gn deconv deconv_bn deconv_gn等基本卷积操作和max avg l2一系列池化、输出输出、加和衔接等操作;
cnn_wrapper/mvsnet.py:包含了基于Network基类构建的各种子网络模块,用于2D特征提取的的UniNet UNet,用于构建代价空间正则的RegNetUS0,用于得到深度残差进行优化的RefineNet等;
mvsnet/colmap2mvsnet.py:负责读入模型,相机参数、图像、点云等等I/O操作;
mvsnet/visualize.py:基于matplotlib的可视化操作;
mvsnet/depthfusion.py:转换为可以Gipuma处理的格式;
mvsnet/preprocess.py:各种载入点云数据集和相机参数,格式化前处理过程。
更多算法和实现过程中的细节分析,请参看MVSNet的 [ ? 论文解读]

pic from pexels.com
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)