学习px4代码也有一段时间了,所以想写一写,自己的一些学习心得吧,也算是笔记吧。
在px4这套代码中,每一个功能都是一个模块,例如姿态控制,也就是一个应用程序,我们可以把它添加到初始话脚本里,让它自启动。需要注意的就是在一个应用程序就是处理订阅的消息,然后发布处理过后的消息。这种消息机制就是uorb消息机制,可以找资料学习它具体实现的一个过程。
接下来,就逐步学习一下这个姿态控制的模块。
首先就是应用程序的入口,“extern "C" __EXPORT int fw_att_control_main(int argc, char *argv[])”,在这个函数里就实现了,这个程序是否已近启动,如果没有启动就会注册函数来启动。
task_main()这个函数就是整个姿态控制的关键,具体姿态控制的算法就是在这里面实现。刚开始就介绍说每个应用程序会订阅相应的消息,然后处理,最后发布。
所以刚开始就是一些消息的订阅:
_att_sp_sub = orb_subscribe(ORB_ID(vehicle_attitude_setpoint));//姿态设定点
_ctrl_state_sub = orb_subscribe(ORB_ID(control_state));//飞机状态
_accel_sub = orb_subscribe_multi(ORB_ID(sensor_accel), 0);//加速度值
_vcontrol_mode_sub = orb_subscribe(ORB_ID(vehicle_control_mode));//控制模式
_params_sub = orb_subscribe(ORB_ID(parameter_update));//参数更新
_manual_sub = orb_subscribe(ORB_ID(manual_control_setpoint));//手动控制的设定
_global_pos_sub = orb_subscribe(ORB_ID(vehicle_global_position));//车辆全球位置
_vehicle_status_sub = orb_subscribe(ORB_ID(vehicle_status));//飞机状态
_vehicle_land_detected_sub = orb_subscribe(ORB_ID(vehicle_land_detected));//着陆探测
接下来就是以check的方式获取订阅消息的值:
vehicle_setpoint_poll();
vehicle_accel_poll();
vehicle_control_mode_poll();
vehicle_manual_poll();
vehicle_status_poll();
vehicle_land_detected_poll();
接下来就是以阻塞等待方式检查参数是否更新,以及当前的飞机状态。阻塞等待这种获取订阅消息的方式,具体是怎么实现的可以查找资料进行学习。
这个if函数就是姿态控制运行的开始,如果姿态发生了改变,就运行这个if
if (fds[1].revents & POLLIN)
那么要知道姿态是否发生改变,那么就需要知道当前的姿态,这通过获取当前姿态的消息,然后得到四元数,转化为旋转矩阵,进而求得姿态角:
1 orb_copy(ORB_ID(control_state), _ctrl_state_sub, &_ctrl_state);
2
3
4 /* get current rotation matrix and euler angles from control state quaternions */
5 math::Quaternion q_att(_ctrl_state.q[0], _ctrl_state.q[1], _ctrl_state.q[2], _ctrl_state.q[3]);
6 _R = q_att.to_dcm();
7
8 math::Vector<3> euler_angles;
9 euler_angles = _R.to_euler();
10 _roll = euler_angles(0);
11 _pitch = euler_angles(1);
12 _yaw = euler_angles(2);
由于姿态控制算法在一些模式下面是不会估算姿态设定点的,所以要确认这些标志。
_att_sp.fw_control_yaw = _att_sp.fw_control_yaw && _vcontrol_mode.flag_control_auto_enabled;//判断垂尾,用于自主起飞。
判断是否安全故障,如果安全故障开启,就会设定降落伞。
接下来是襟翼的设定,分为手动控制和自动控制
1 float flap_control = 0.0f;
2
3 /* map flaps by default to manual if valid */
4 if (PX4_ISFINITE(_manual.flaps) && _vcontrol_mode.flag_control_manual_enabled
5 && fabsf(_parameters.flaps_scale) > 0.01f) {
6 flap_control = 0.5f * (_manual.flaps + 1.0f) * _parameters.flaps_scale;
7
8 } else if (_vcontrol_mode.flag_control_auto_enabled
9 && fabsf(_parameters.flaps_scale) > 0.01f) {
10 flap_control = _att_sp.apply_flaps ? 1.0f * _parameters.flaps_scale : 0.0f;
11 }
12
13 // move the actual control value continuous with time, full flap travel in 1sec
14 if (fabsf(_flaps_applied - flap_control) > 0.01f) {
15 _flaps_applied += (_flaps_applied - flap_control) < 0 ? deltaT : -deltaT;
16
17 } else {
18 _flaps_applied = flap_control;
19 }
然后是襟副翼的设定,分为手动控制和自动控制
1 if (PX4_ISFINITE(_manual.aux2) && _vcontrol_mode.flag_control_manual_enabled
2 && fabsf(_parameters.flaperon_scale) > 0.01f) {
3 flaperon_control = 0.5f * (_manual.aux2 + 1.0f) * _parameters.flaperon_scale;
4
5 } else if (_vcontrol_mode.flag_control_auto_enabled
6 && fabsf(_parameters.flaperon_scale) > 0.01f) {
7 flaperon_control = _att_sp.apply_flaps ? 1.0f * _parameters.flaperon_scale : 0.0f;
8 }
9
10 // move the actual control value continuous with time, full flap travel in 1sec
11 if (fabsf(_flaperons_applied - flaperon_control) > 0.01f) {
12 _flaperons_applied += (_flaperons_applied - flaperon_control) < 0 ? deltaT : -deltaT;
13
14 } else {
15 _flaperons_applied = flaperon_control;
16 }
接下来就是通过订阅的消息来判断是否能够控制姿态
也就是这一行代码:
1 if (_vcontrol_mode.flag_control_attitude_enabled)
在这个if语句里面执行的主要有判断空速是否有效,如果无效设定空速为参数设定,如果有效设定空速为测量或者计算的空速。
通过vehicle_global_position来计算飞机的地面速度。
如果自问模式下面,我们需要通过遥控器来产生姿态设定点;
计算机体坐标系下飞机的速度;
准备姿态控制器运行需要的参数;
1 control_input.roll = _roll;
2 control_input.pitch = _pitch;
3 control_input.yaw = _yaw;
4 control_input.roll_rate = _ctrl_state.roll_rate;
5 control_input.pitch_rate = _ctrl_state.pitch_rate;
6 control_input.yaw_rate = _ctrl_state.yaw_rate;
7 control_input.speed_body_u = speed_body_u;
8 control_input.speed_body_v = speed_body_v;
9 control_input.speed_body_w = speed_body_w;
10 control_input.acc_body_x = _accel.x;
11 control_input.acc_body_y = _accel.y;
12 control_input.acc_body_z = _accel.z;
13 control_input.roll_setpoint = roll_sp;
14 control_input.pitch_setpoint = pitch_sp;
15 control_input.yaw_setpoint = yaw_sp;
16 control_input.airspeed_min = _parameters.airspeed_min;
17 control_input.airspeed_max = _parameters.airspeed_max;
18 control_input.airspeed = airspeed;
19 control_input.scaler = airspeed_scaling;
20 control_input.lock_integrator = lock_integrator;
21 control_input.groundspeed = groundspeed;
22 control_input.groundspeed_scaler = groundspeed_scaler;
前面的判断就是为运行姿态控制器所准备的。
1 _roll_ctrl.control_attitude(control_input);
2 _pitch_ctrl.control_attitude(control_input);
3 _yaw_ctrl.control_attitude(control_input);
4 _wheel_ctrl.control_attitude(control_input);
上面就是计算目标与当前姿态的角度误差值,对于roll和pitch是计算角度误差,然后算出角速率,对于yaw速率的计算是,假设在没有侧向力的情况下,通过计算可以得到相应的yaw速率:
就是通过如下计算公式得到:

以及:
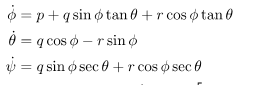 、
、
计算得到相应的yaw速率;
由于滚转,俯仰和偏航速率是在地面坐标系下,因此,要通过坐标转换转换到机体坐标系下,也就是:
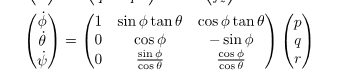 通过上述转换就把角速率转换到机体坐标系下了,接下来是通过误差,运用pid来控制姿态,下面的还需要研究一下。先这样吧。
通过上述转换就把角速率转换到机体坐标系下了,接下来是通过误差,运用pid来控制姿态,下面的还需要研究一下。先这样吧。
以上内容均属自己理解,有错误之处见谅,共同讨论。