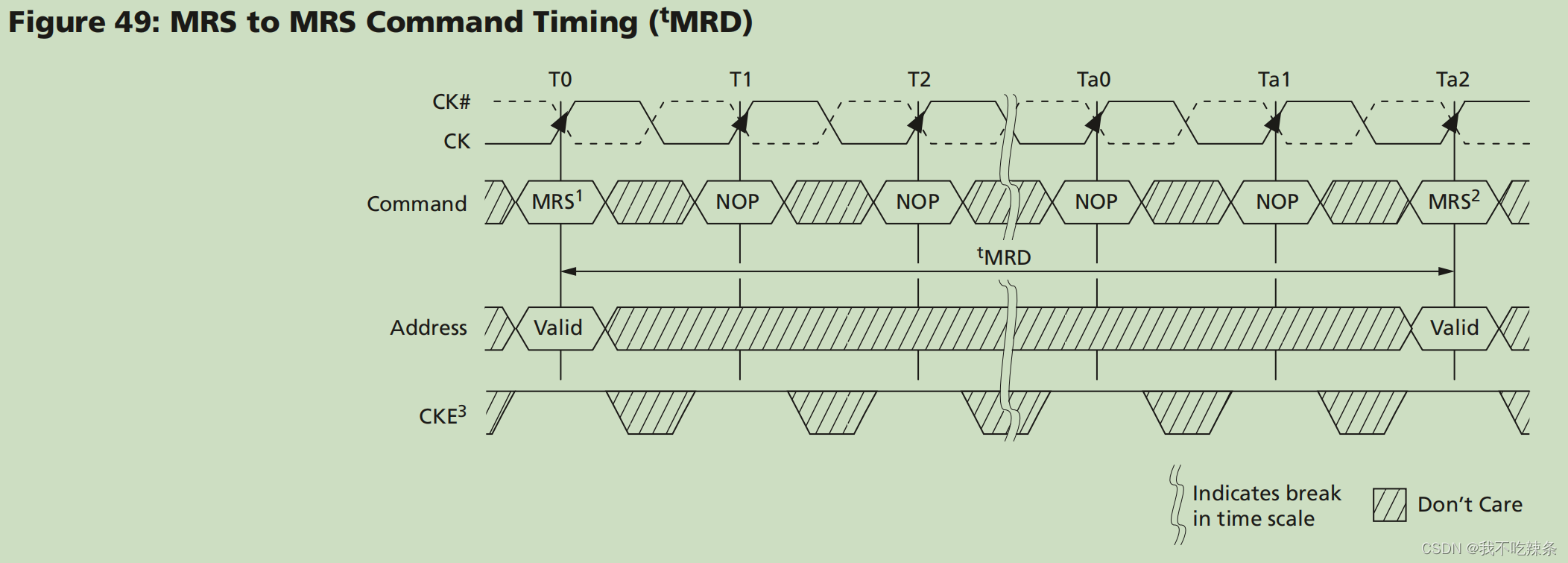
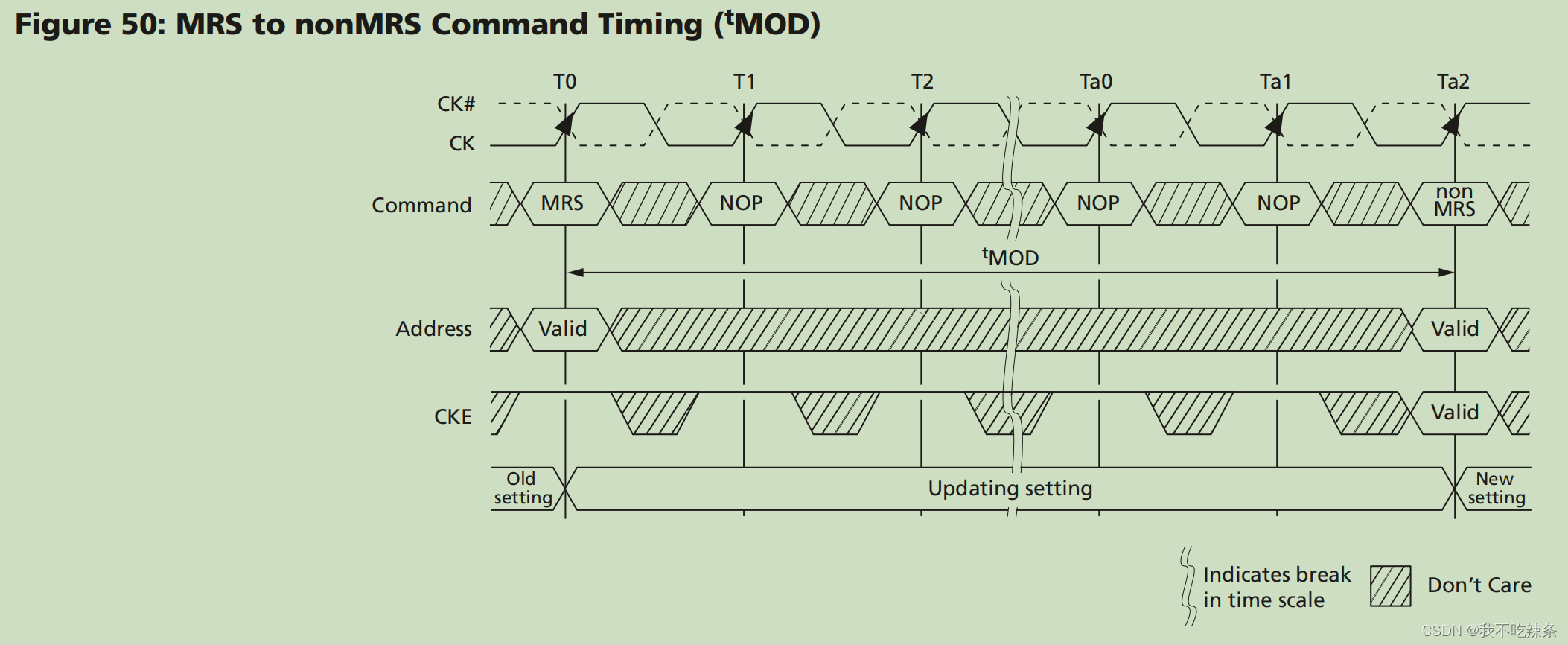
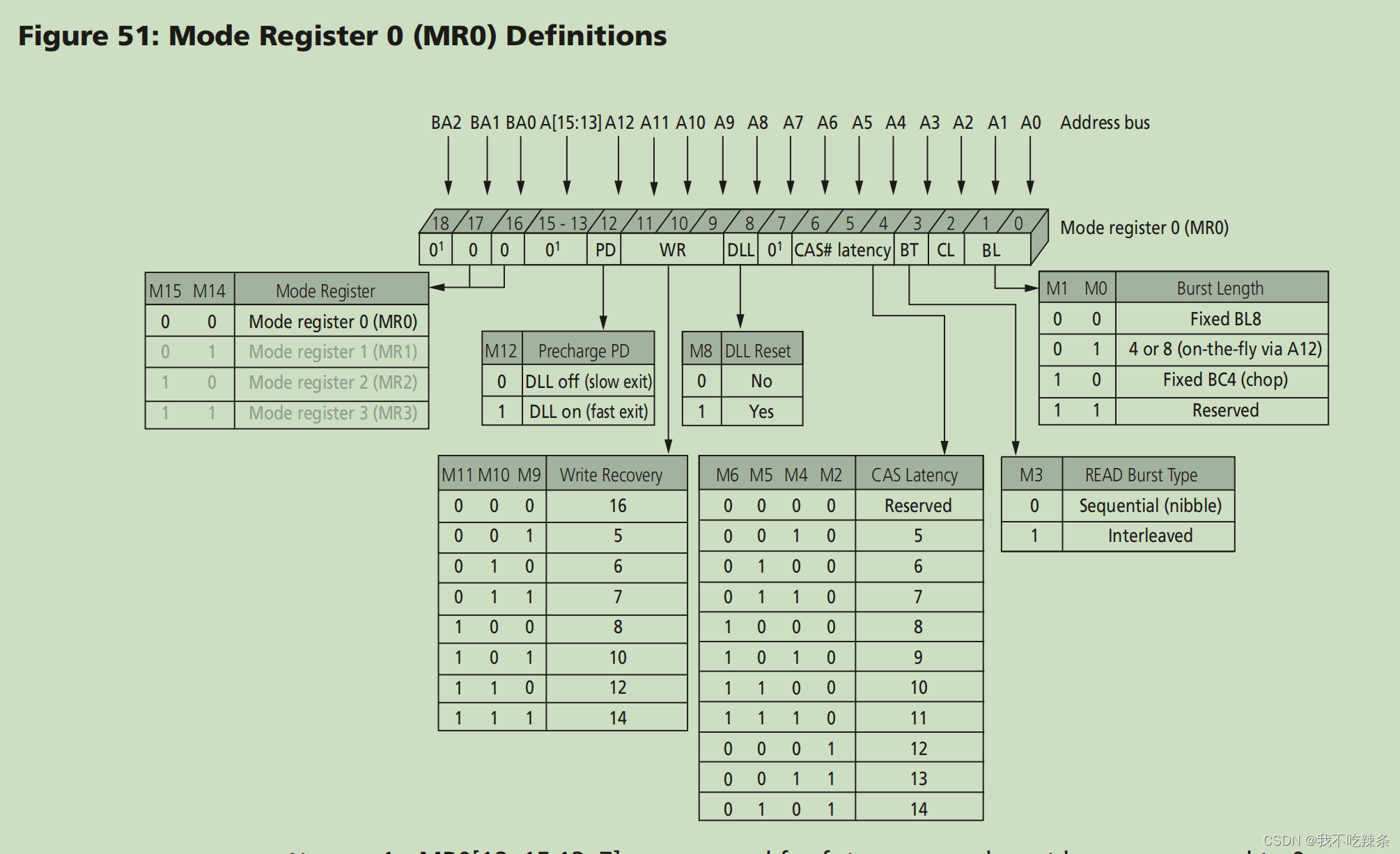
mode register 模式寄存器(MR0-MR3)用于定义DDR3sdram的各种可编程操作模式。在初始化过程中,模式寄存器通过模式寄存器设置(MRS)命令进行编程,并保留存储的信息(MR0[8]除外,即自清除),直到重新编程,重置#下降,设备断电。 可以通过重新执行MRS命令来更改模式寄存器的内容。即使用户只想修改模式寄存器变量的一个子集,在发出MRS命令时也必须编程所有变量。如果正确执行,重新编程模式寄存器将不会改变内存数组的内容。 只有当所有bank空闲且处于预充状态(满足tRP且未进行数据爆发)时,才能发出(或重新发出MRS命令)。在发出MRS命令后,必须满足两个参数:tMRD和tMOD。控制器必须等待MRD才能启动任何后续MRS命令。 模式寄存器配置到模式寄存器配置时间:TMRD 模式寄存器配置到非模式寄存器配置时间: TMOD 基本寄存器MR0用于定义各种DDR3sdram操作模式。这些定义包括选择突发长度、突发类型、CAS延迟、操作模式、DLL重置、写恢复和预充电断电模式 模式寄存器1内容: 突发长度配置:
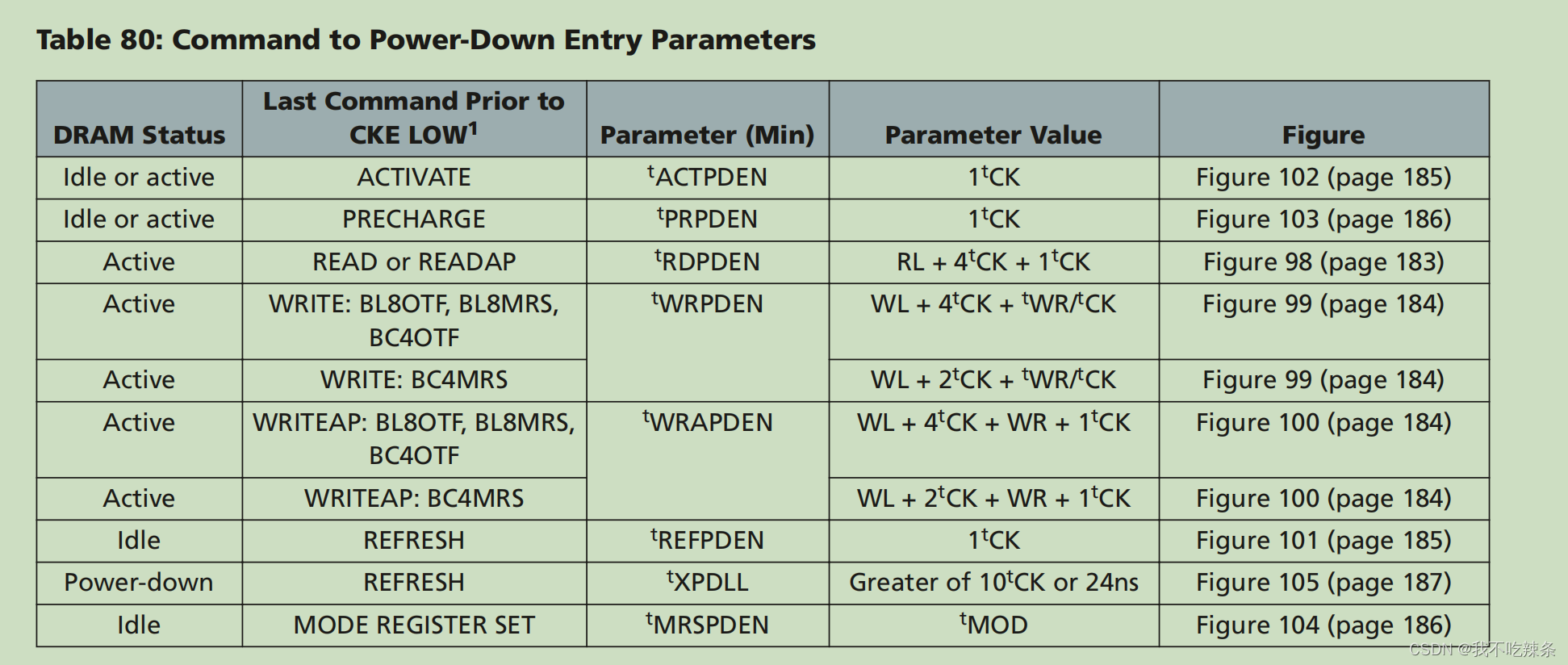
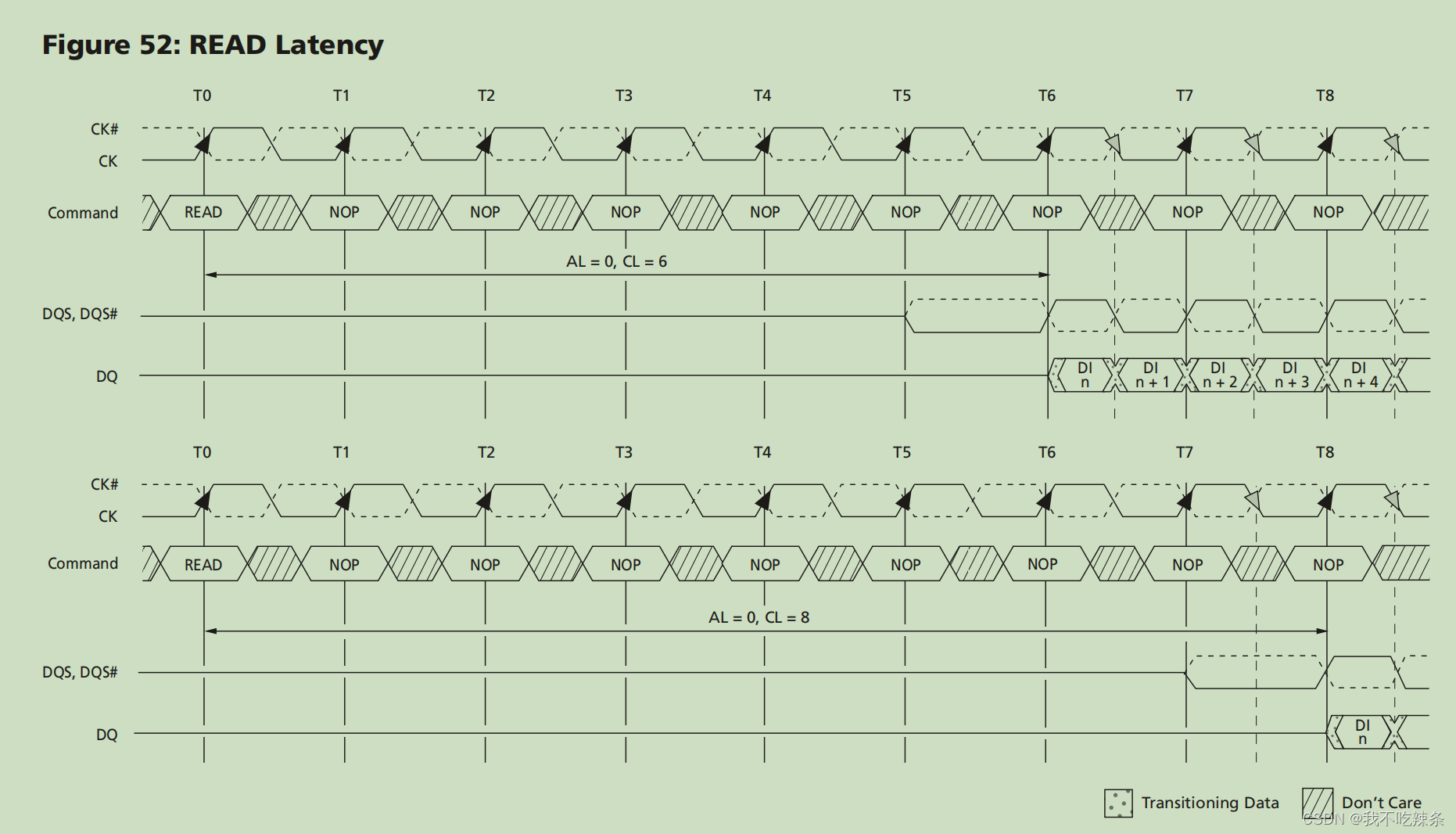
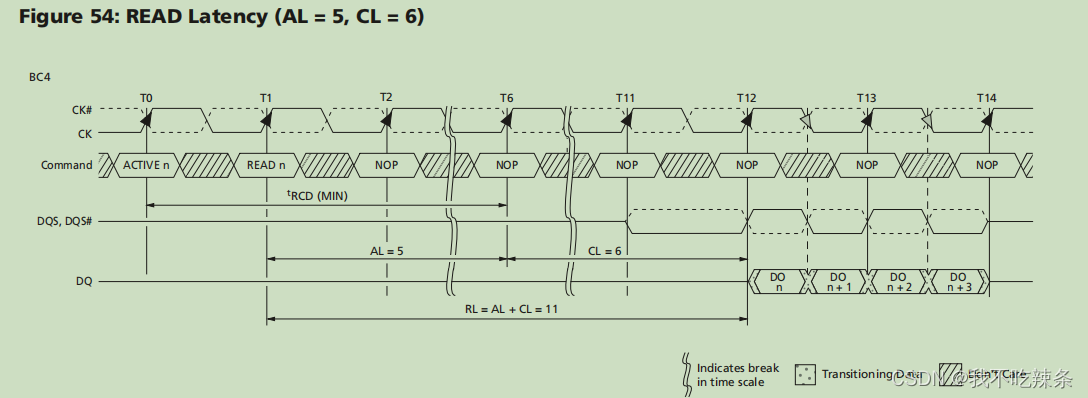
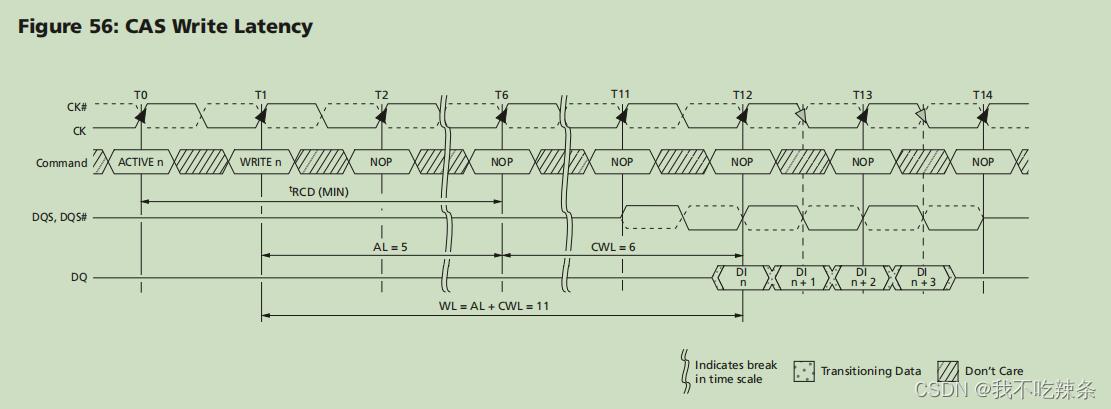
低功耗模式: 当CKE为低时同时命令为nop或者des时,进入低功耗模式。当MRS、MPR、ZQCAL、READ或写操作正在进行时,CKE不允许下降。当任何其他合法操作(如ROW激活、预充电、自动预充电或刷新)正在进行中时,CKE被允许下降。然而,在这些操作完成之前,断电IDD规范并不适用。根据之前的DRAM状态和在CKE下降之前发出的命令,必须满足某些时间约束(如表80所示)。图95(第182页)至图104(图186页)详细显示了描述不同断电模式进入和退出的时序图。 CAS Latency(CL) read 到数据输出延迟:
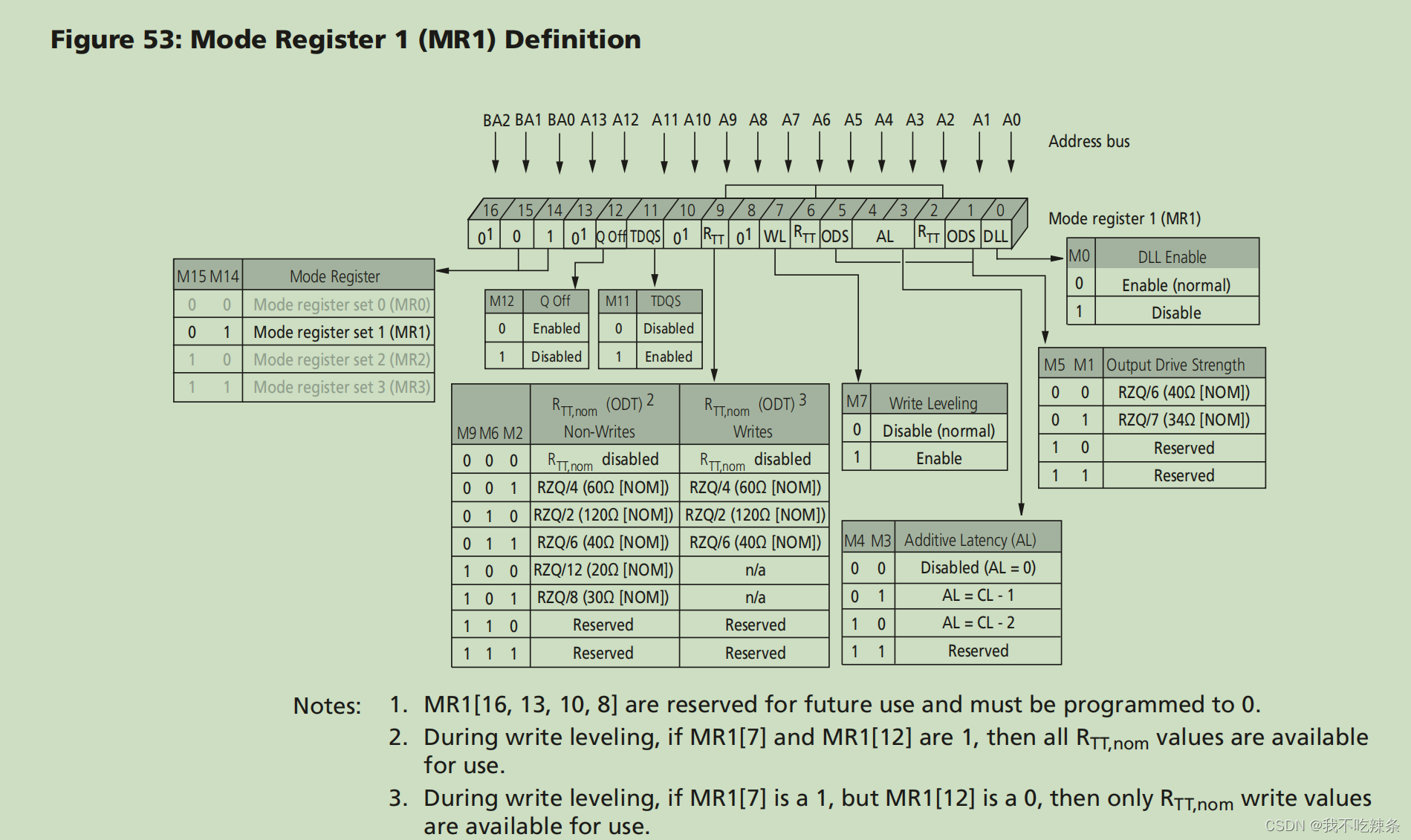
模式寄存器1(MODE REGISTER 1(MR1)): 模式寄存器1(MR1)模式寄存器1(MR1)控制其他模式寄存器中不可用的附加功能和功能:QOFF(输出禁用)、TDQS(仅用于x8配置)、DLL启用/DLL禁用、RTT、标称值(ODT)、写入调平、发布的CAS附加延迟和输出驱动器强度。这些功能通过图53(第138页)所示的位进行控制。MR1寄存器通过MRS命令进行编程,并保留存储的信息,直到它被重新编程,直到重置#下降,或直到设备断电。重新编程MR1寄存器将不会改变内存数组的内容。当所有银行空闲时,必须加载MR1寄存器。控制器必须满足规定的定时参数tMRD和tMOD。 模式寄存器1功能: 1、DLL Enable/DLL Disable 2、Output Drive Strength 3、OUTPUT ENABLE/DISABLE 4、TDQS Enable 5、On-Die Termination 6、WRITE LEVELING 7、POSTED CAS ADDITIVE Latency
模式寄存器2(Mode Register 2(MR2)):
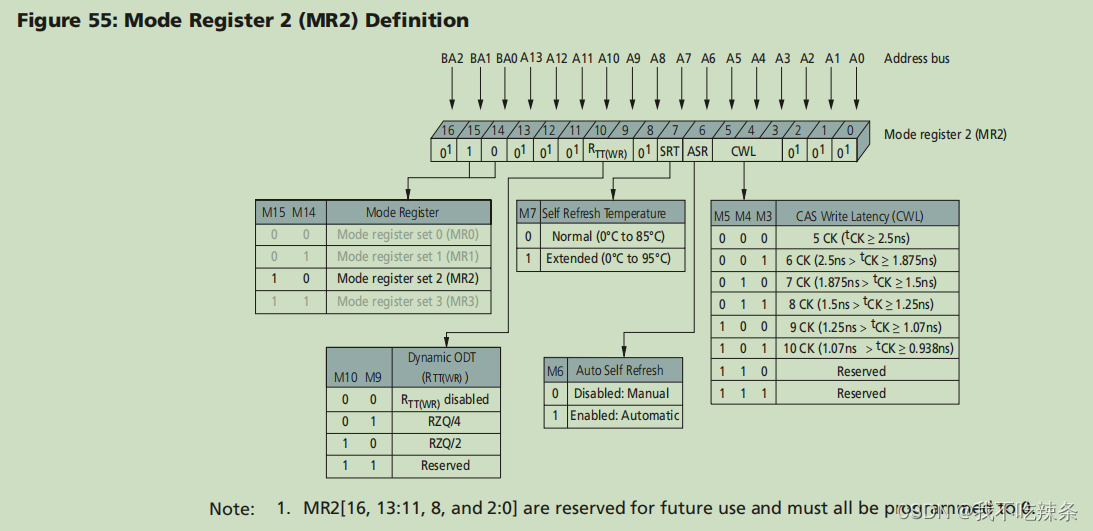
模式寄存器2(MR2)控制其他模式寄存器中不可用的附加功能和功能。这些附加功能包括CAS写延迟(CWL)、AUTOSELF刷新(ASR)、SELF刷新温度(SRT)和动态ODT(RTT(WR))。这些函数通过图55中所示的位进行控制。MR2通过MRS命令进行编程,并将保留所存储的信息,直到对其再次进行编程或直到设备断电。重新编程MR2寄存器将不会改变内存数组的内容。当所有数据组都空闲且没有数据突发时,必须加载MR2寄存器,并且控制器必须等待指定的时间tMRD和tMOD,然后才能启动后续操作。 模式寄存器2功能: 1、CAS Write Latency (CWL)
2、AUTO SELF REFRESH (ASR) 3、SELF REFRESH TEMPERATURE (SRT) 4、SRT vs. ASR 5、DYNAMIC ODT
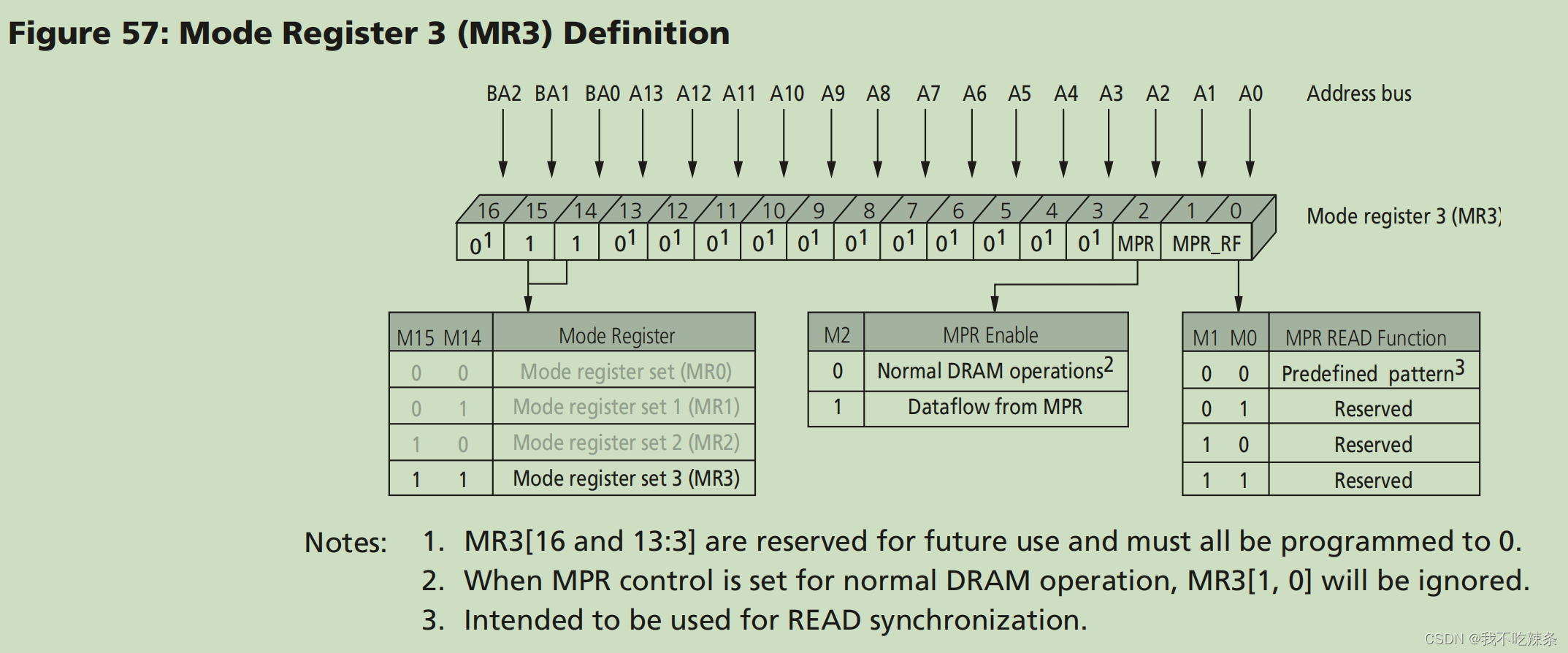
模式寄存器3(Mode Register 3(MR3)): 模式寄存器3(MR3)控制其他模式寄存器中不可用的附加功能和功能。当前定义的是多用途寄存器(MPR)。这个函数通过图57(第144页)中所示的位进行控制。MR3通过负载模式命令进行编程,并保留存储的信息,直到再次进行编程或直到设备断电。重新编程MR3寄存器将不会改变内存数组的内容。当所有bank空闲且没有数据突发时,必须加载MR3寄存器,并且控制器必须等待指定的时间tMRD和tMOD才能启动后续操作。 功能: 1、MULTIPURPOSE REGISTER (MPR) 2、MPR Register Address Definitions and Bursting Order