参考资料:
stm32与HC-SR04超声波传感器测距
HC-SR04超声波测距注意事项
STM32—驱动HC-SR04超声波测距模块
HC-SR04初识
HC-SR04 超声波原理图讲解与时序分析与arduino使用
HC-SR04超声波原理,波速与温度的关系
用Trig和Echo引脚实现测距的流程:
1.通过Trig输出一段至少10us的高电平(脉冲),触发一次测距,超声波在传输的过程中Echo一直输出高电平。
2.在Trig脉冲输出后,立即检测Echo引脚的电平,测出Echo高电平持续的时间t,t就是超声波在所测距离一个来回所需时间。
感应角度:不大于15度
探测距离:2cm-450cm
高精度可达0.2cm
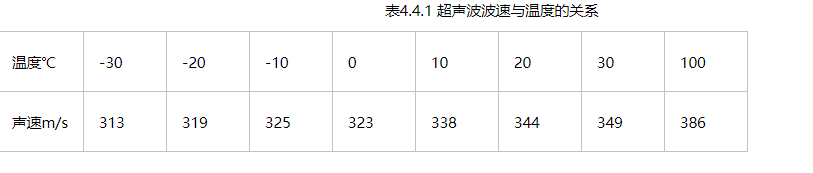
利用定时器3的TIM_IT_Update中断来计数,stm32f103时钟是72M, TIM3_Int_Init(1000-1,72-1);//1Mhz的计数频率,1us计数一次,计数到1000为1ms,产生一次溢出中断 ,超声波的速度取344m/s=344mm/ms,具体可更据温度设置,以毫秒为单位乘以速度,当前counter值补足1ms时,把us换算成ms:如图
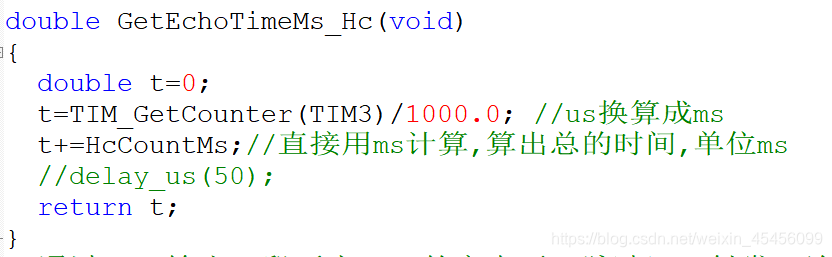
计数距离就是用上面的函数得到来回时间(ms为单位),除以2得到单程时间,再乘以速度344mm/ms,得到距离ms为单位)

2种处理数据的方法(前面两个函数实质一样)
GetLength_Hc()
GetLength2_Hc()
GetLength3_Hc()
主要代码
“timer.h”
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
extern u16 HcCountMs;
void TIM3_Int_Init(u16 arr,u16 psc);
#endif
“timer.c”
#include "timer.h"
u16 HcCountMs=0;
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ITConfig(TIM3, TIM_IT_Update,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM3, ENABLE);
}
void TIM3_IRQHandler(void)
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update );
HcCountMs++;
}
}
“hc_sr04.c”
#include "hc_sr04.h"
#include "timer.h"
#include "delay.h"
#include "usart.h"
#define N 7
double data[N];
void HC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = HCSR04_TRIG;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);
GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG);
GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(HCSR04_PORT, &GPIO_InitStructure);
GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO);
TIM3_Int_Init(1000-1,72-1);
}
void OpenTimer_Hc(void)
{
TIM_SetCounter(TIM3,0);
HcCountMs=0;
TIM_Cmd(TIM3, ENABLE);
}
void CloseTimer_Hc(void)
{
TIM_Cmd(TIM3, DISABLE);
}
double GetEchoTimeMs_Hc(void)
{
double t=0;
t=TIM_GetCounter(TIM3)/1000.0;
t+=HcCountMs;
return t;
}
void Trig_Hc(void)
{
TRIG_Send=1;
delay_us(15);
TRIG_Send=0;
}
void adoptData_Hc(void)
{
u8 i;
double t=0;
double lengthTemp=0;
for(i=0;i<N;i++)
{
Trig_Hc();
while(ECHO_Reci!=1);
OpenTimer_Hc();
while(ECHO_Reci==1);
CloseTimer_Hc();
t=GetEchoTimeMs_Hc();
lengthTemp=(t/2.0)*334;
data[i]=lengthTemp;
}
}
double GetLength2_Hc(void)
{
u8 i;
double sum=0;
double average=0;
adoptData_Hc();
for(i=0;i<N;i++)
{
sum+=data[i];
}
average=sum/N;
return average;
}
double GetLength3_Hc(void)
{
u8 i;
double min=4000;
double max=0;
double sum=0;
double average=0;
adoptData_Hc();
for(i=0;i<N;i++)
{
min=data[i]<min?data[i]:min;
printf("\r\ndata:%.2fmm\t",data[i]);
}
for(i=0;i<N;i++)
{
max=data[i]>max?data[i]:max;
}
printf("\r\nmin:%.2fmm\t",min);
printf("\r\nmax:%.2fmm\t",max);
for(i=0;i<N;i++)
{
sum+=data[i];
}
sum=sum-min-max;
average=sum/(N-2);
return average;
}
double GetLength_Hc(void)
{
double t=0;
int i=0;
double lengthTemp=0;
double sum=0;
while(i!=N)
{
Trig_Hc();
while(ECHO_Reci!=1);
OpenTimer_Hc();
while(ECHO_Reci==1);
CloseTimer_Hc();
t=GetEchoTimeMs_Hc();
lengthTemp=(t/2.0)*334;
sum+=lengthTemp;
i=i+1;
}
lengthTemp=sum/N;
return lengthTemp;
}
“main.c”
#include "led.h"
#include "usart.h"
#include "hc_sr04.h"
#include "delay.h"
#include "sys.h"
#include "timer.h"
int main(void)
{
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(9600);
LED_Init();
HC_Init();
printf("超声波初始化成功!\r\n");
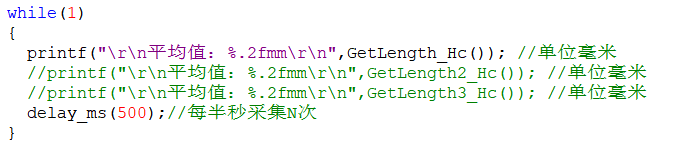
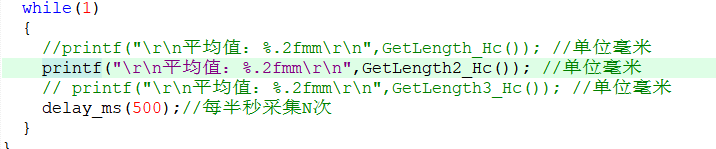
while(1)
{
printf("\r\n平均值:%.2fmm\r\n",GetLength_Hc());
delay_ms(500);
}
}
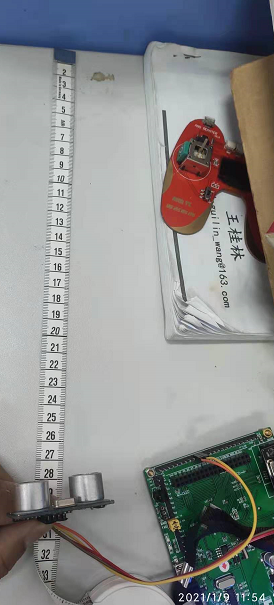
测试实验:
1,当使用GetLength_Hc()获取长度,求和再取平均
串口现象:第一个值刚开始测距,不准确,理所应当
2,当使用GetLength2_Hc()获取长度,实际和1一样,求和再取平均
串口现象:

3,当使用GetLength3_Hc()获取长度,去掉最大最小,剩下的取平均

串口现象:



结论:最后的算法更接近真实距离。
距离大概是272-278mm,可能由于单手改代码测试,另一种手抖也造成了稍微移动,误差多少?起始距离在哪?我也不知道咋参考,请读者赐教,需要源文件的可以私信。

编程犯的几个错误:
1,比较大小时,采用min=0去比较大小,正数都比0大,请问谁能抢到min这个宝座??
2,double GetLength3_Hc(void)函数中,计算平均值时,忘了打括号写成average=sum/N-2,正确应为average=sum/(N-2);
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)