SPI协议读取FLASH【FPGA】
- 一、SPI协议
- 1、SPI简介
- 2、SPI物理层
- 3、SPI协议层
-
- 4、 SPI 基本通讯过程
- 5、 通讯的起始和停止信号
- 6、数据有效性
- 二、Flash
- 1、状态寄存器
- 1、WIP(正在写入)
- 2、WEL(写使能锁存器)
- 3、BP(块保护)
- 4、SRWD(状态寄存器写保护)
- 2、Flash运行的模式
- 1、Active Power Mode
- 2、Stand-by Power Mode
- 3、操作指令
- 1、Write Enable(WREN-0x06)
- 2、Write Disable(WRDI-0x04)
- 3、Read Identification(RDID-0x9F)
- 4、Read State Register(RDSR-0x05)
- 5、Write State Register(WRSR-0x01)
- 6、Read Data Byte(READ-0x03)
- 7、Read Data Bytes at Higher Speed (FAST_READ-0x0B)
- 8、Page Program(PP-0x02)
- 9、Sector Erase(SE-0xD8)
- 10、Bulk Erase(BE-0xC7)
- 三、SPI_FLASH
- spi_master
- flash_read
- flash_write
- flash_ctrl
- 四、参考
- 五、源码
一、SPI协议
1、SPI简介
SPI(Serial Peripheral Interface,串行外围设备接口)通讯协议,是一种同步串行接口技术,
是一种高速、全双工、同步通信总线,在芯片中只占用四根管脚用来控制及数据传输
优点:是支持全双工通信,通讯方式较为简单,且相对数据传输速率较快;
缺点:是没有指定的流控制,没有应答机制确认数据是否接收
2、SPI物理层
SPI 通讯设备的通讯模式是主从通讯模式,通讯双方有主从之分(一主一从和一主多从)
(1) SCK (Serial Clock):时钟信号线,用于同步通讯数据。由通讯主机产生,决定了通讯的速率,不同的设备支持的最高时钟频率不同,两个设备之间通讯时,通讯速率受限于低速设备。
(2) MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。主机的数据从这条信号线输出,从机由这条信号线读入主机发送的数据,数据方向由主机到从机。
(3) MISO (Master Input,Slave Output):主设备输入/从设备输出引脚。主机从这条信号线读入数据,从机的数据由这条信号线输出到主机,数据方向由从机到主机。
(4) CS(Chip Select):片选信号线,也称为 CS_N,以下用 CS_N 表示。当有多个 SPI 从设备与 SPI 主机相连时,设备的其它信号线 SCK、MOSI 及 MISO 同时并联到相同的 SPI总线上,即无论有多少个从设备,都共同使用这 3 条总线;而每个从设备都有独立的这一条 CS_N 信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线。I2C 协议中通过设备地址来寻址、选中总线上的某个设备并与其进行通讯;而 SPI协议中没有设备地址,它使用 CS_N 信号线来寻址,当主机要选择从设备时,把该从设备的 CS_N 信号线设置为低电平,该从设备即被选中,即片选有效,接着主机开始与被选中的从设备进行 SPI 通讯。所以 SPI 通讯以 CS_N 线置低电平为开始信号,以 CS_N 线被拉高作为结束信号。
3、SPI协议层
CPOL/CPHA 及通讯模式
SPI 通讯协议一共有四种通讯模式,模式 0、模式 1、模式 2 以及模式 3,这 4 种模式(0、3模式比较常用)
分别由时钟极性(CPOL,Clock Polarity)和时钟相位(CPHA,Clock Phase)来定义,其中
CPOL 参数规定了空闲状态(CS_N 为高电平,设备未被选中)时 SCK 时钟信号的电平状态,(0:低 1:高)
CPHA 规定了数据采样是在 SCK 时钟的奇数边沿还是偶数边沿。(0:奇数边沿 1:偶数边沿)
模式 0:CPOL= 0,CPHA=0。空闲状态时 SCK 串行时钟为低电平;数据采样在 SCK时钟的奇数边沿,
本模式中,奇数边沿为上升沿;数据更新在 SCK 时钟的偶数边沿,本模式中,偶数边沿为下降沿。
模式 1:CPOL= 0,CPHA=1。空闲状态时 SCK 串行时钟为低电平;数据采样在 SCK时钟的偶数边沿,
本模式中,偶数边沿为下降沿;数据更新在 SCK 时钟的奇数边沿,本模式中,偶数边沿为上升沿。
模式 2:CPOL= 1,CPHA=0。空闲状态时 SCK 串行时钟为高电平;数据采样在 SCK时钟的奇数边沿,
本模式中,奇数边沿为下降沿;数据更新在 SCK 时钟的偶数边沿,本模式中,偶数边沿为上升沿。
模式 3:CPOL= 1,CPHA=1。空闲状态时 SCK 串行时钟为高电平;数据采样在 SCK时钟的偶数边沿,
本模式中,偶数边沿为上升沿;数据更新在 SCK 时钟的奇数边沿,本模式中,偶数边沿为下降沿。
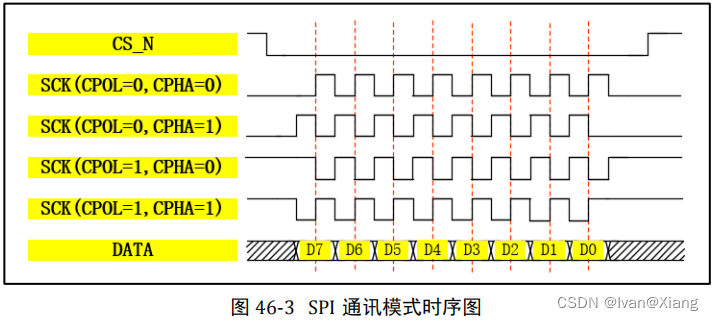
红线对应的为数据采样点
4、 SPI 基本通讯过程
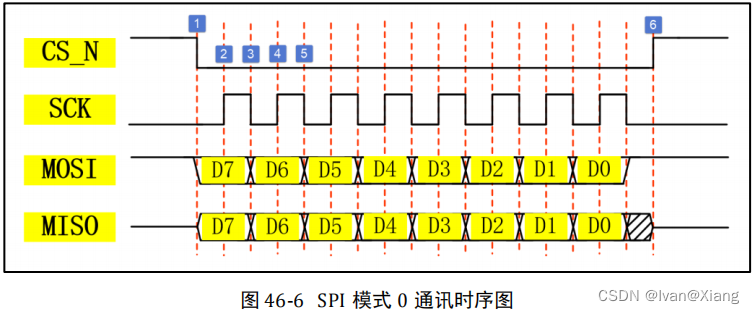
MOSI 与 MISO 的信号只在 CS_N 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
5、 通讯的起始和停止信号
在图 46-6 中的标号①处,CS_N 信号线由高变低,是 SPI 通讯的起始信号。CS_N 是每个从机各自独占的信号线,当从机在自己的 CS_N 线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。
在图中的标号⑥处,CS_N 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
6、数据有效性
数据传输时,MSB 先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同样的协定,一般都会采图 46-6 中的 MSB 先行模式,先发送数据的最高位。
观察图中的②③④⑤标号处,MOSI 及 MISO 的数据在 SCK 的下降沿期间变化输出,在 SCK 的上升沿时被采样。即在 SCK 的上升沿时刻,MOSI 及 MISO 的数据有效,高电平时表示数据“1”,为低电平时表示数“0”。在其它时刻,数据无效,MOSI 及 MISO为下一次表示数据做准备。SPI 每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制。
二、Flash
1、状态寄存器
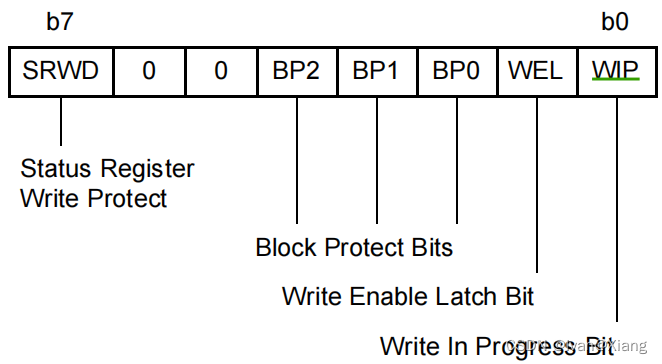
1、WIP(正在写入)
高电平“1” 当前Flash还在工作(写状态寄存器、写入数据、擦除数据)
低电平“0” 当前Flash处于空闲的状态,可以处理指令。
2、WEL(写使能锁存器)
高电平“1” 内部启用锁存设置,可以接收输入的指令
低电平“0” 除了写使能指令,其他指令一律不接收
3、BP(块保护)
①块保护(BP2、BP1、BP0)位是非易失性的。
②定义了需要保护数据的区域(只读),防止被指令擦除
③只能使用写状态寄存器指令修改
④当所有的BP(BP2、BP1、BP0)都为0的时候,才能执行BE(全擦除)指令
4、SRWD(状态寄存器写保护)
状态寄存器写保护位与写保护W(芯片的引脚)共同决定状态寄存器BP2、BP1、BP0为的读写属性。
写保护W引脚为低电平“0”的时候,SRWD才能决定BP的只读属性。
写保护W引脚为低电平“1”的时候,BP2、BP1、BP0为只读属性。
高电平“1” BP位只读
低电平“0” BP位可读可写
2、Flash运行的模式
1、Active Power Mode
处于该状态下,说明flash正处于工作的状态(CS拉低、CS拉高之后一小段时间以内,都会处于该状态)。
2、Stand-by Power Mode
处于该模式下,flash能够处理输入的指令,并且芯片的功耗也会降低。
3、操作指令
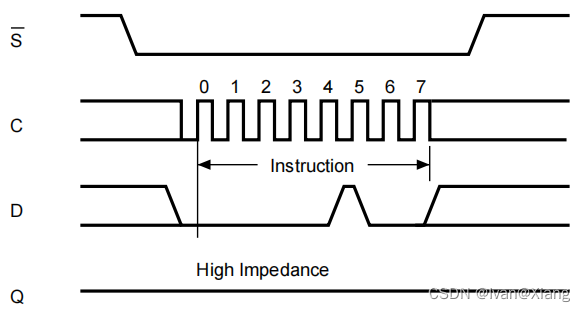
1、Write Enable(WREN-0x06)
写使能指令用于设置状态寄存器的WEL位,将该位置“1”,后续很多的指令都需要先写入该指令之后,才能被正确的识别。
2、Write Disable(WRDI-0x04)
写失能指令设置状态寄存器的WEL位,将该位置“0”
在以下的条件下,也会将WEL位置“0”
①上电
②执行WRDI指令完成
③执行WRSR(写状态寄存器)指令完成
④执行PP指令完成
⑤执行SE指令完成
⑥执行BE指令完成
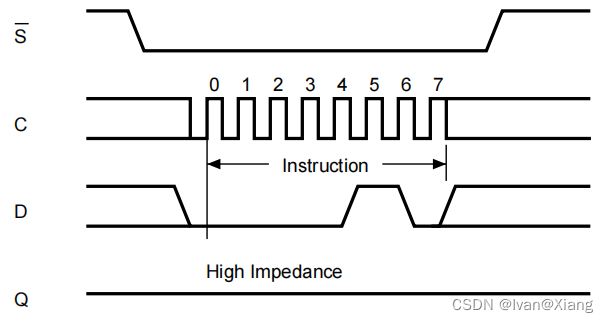
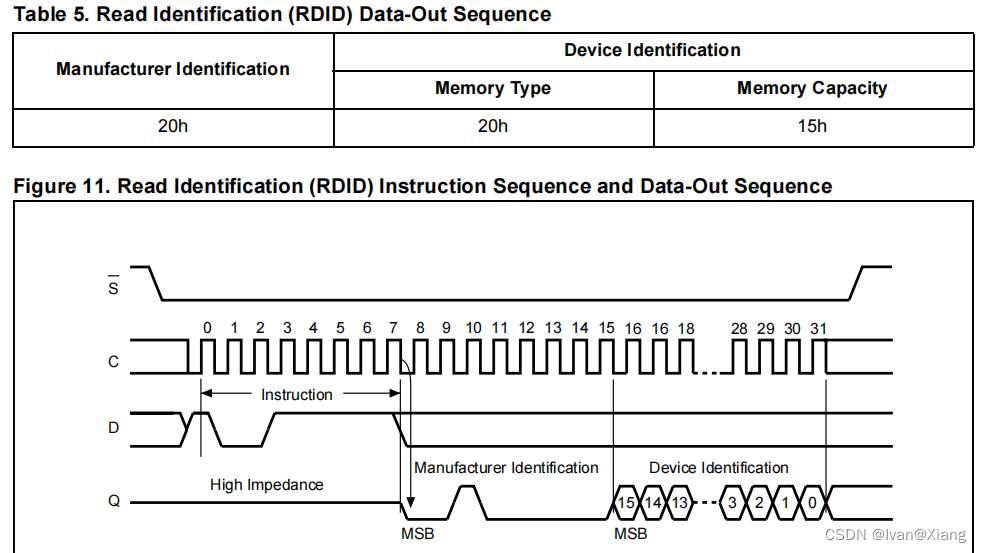
3、Read Identification(RDID-0x9F)
可以直接发送该指令获取设备的信息(3个字节),不需要提前发送WREN指令。
发送完该指令之后,Flash立即进入Stand-by Power Mode,能够立即接收下一次指令。
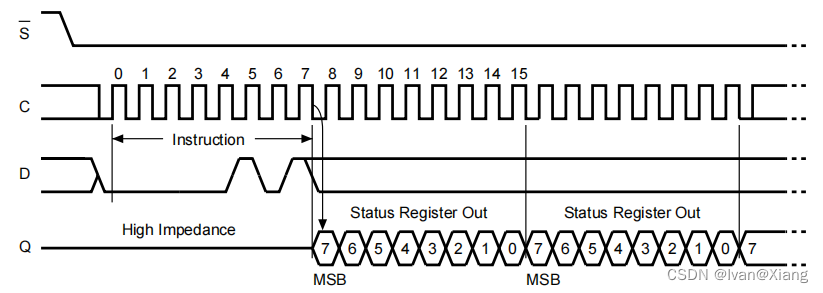
4、Read State Register(RDSR-0x05)
状态寄存器可以在任何时候被读取,包括Flash处于Stand-by Power Mode,都可以被读取。
在发送一个指令之前,最好先读取状态寄存器的WIP(正在写入)位的值。
发送完该指令之后,Flash会一直发送状态寄存器的值 ,直到将片选信号拉高。
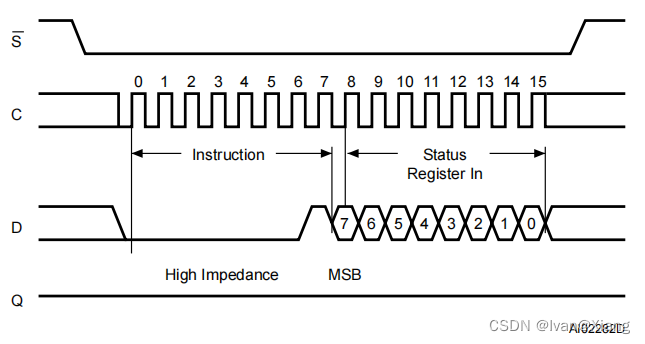
5、Write State Register(WRSR-0x01)
更新状态寄存器的值,发送该指令需要先发送WREN(写使能)指令。
在写入状态寄存器值的时候,依然可以读取状态寄存器WIP(正在写入)值,判断写入是否完成。
该指令写完之后,将WEL位值“0”。
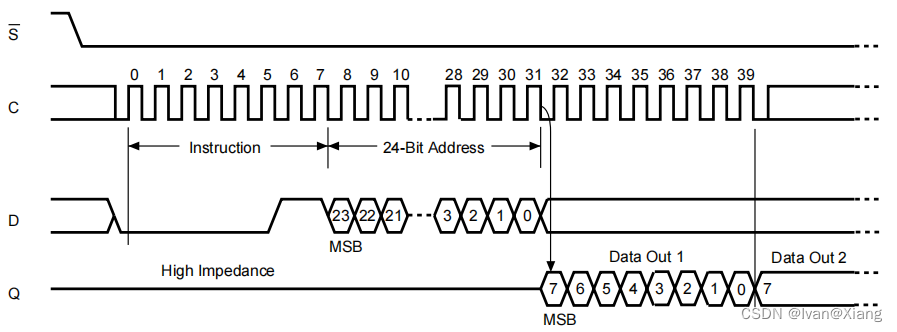
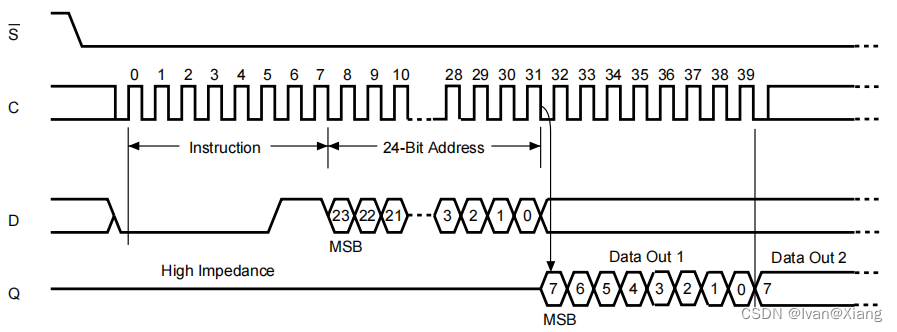
6、Read Data Byte(READ-0x03)
发送该指令之后,后续紧跟3个字节的地址信息(扇区地址、页地址、字节地址),之后每次回传一次数据,就会在当前的地址基础上加1,直到片选CS信号拉高。
数据在时钟下降沿更新输出。输出数据的频率最大20MHz,所以时钟设置为20MHz。
理论上,该指令能够将整个Flash全部读完。
当Flash处于擦除、写入数据、写周期的状态时,任何的READ指令都会被拒绝。
7、Read Data Bytes at Higher Speed (FAST_READ-0x0B)
8、Page Program(PP-0x02)
写入该指令之前,需要先写入WREN指令,使能写的功能。
写入指令之后,需要写入3字节的地址信息,再传输需要存储的数据。
如果写入的数据个数大于了256(一页),那么就会覆盖掉最先存入的数据(在当前页循环存入)。
将内存中的值又由1变为0
执行完该指令之后,将状态寄存器的WEL置为“0”。
9、Sector Erase(SE-0xD8)
在写入指令之前,需要先写入WREN指令,使能写锁存器。
扇区擦除,将指定扇区的全部数据置“1”
完成该指令之后,状态寄存器WEL的值会置“0”
执行该指令的过程,可以读取状态寄存器的WIP的值,判断是否擦除完成
10、Bulk Erase(BE-0xC7)
在执行指令之前,需要先执行WREN指令,将整个Flash的所有数据置为“1”
完成该指令之后,状态寄存器WEL的值会置“0”
执行该指令的过程,可以读取状态寄存器的WIP的值,判断是否擦除完成
三、SPI_FLASH
spi_master
module spi_master(
input clk ,
input rst_n ,
input req ,
input [7:0] din ,
output [7:0] dout ,
output done ,
output cs_n ,
output mosi ,
input miso ,
output sclk
);
localparam SCLK_PERIOD = 16,
SCLK_FALL = 4 ,
SCLK_RISE = 12;
reg [ 3:0] cnt_sclk ;
wire add_cnt_sclk ;
wire end_cnt_sclk ;
reg [ 3:0] cnt_bit ;
wire add_cnt_bit ;
wire end_cnt_bit ;
reg spi_sclk ;
reg spi_mosi ;
reg [7:0] rx_data ;
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt_sclk <= 0;
end
else if(add_cnt_sclk) begin
if(end_cnt_sclk)
cnt_sclk <= 0;
else
cnt_sclk <= cnt_sclk+1 ;
end
end
assign add_cnt_sclk = (req);
assign end_cnt_sclk = add_cnt_sclk && cnt_sclk == (SCLK_PERIOD)-1 ;
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt_bit <= 0;
end
else if(add_cnt_bit) begin
if(end_cnt_bit)
cnt_bit <= 0;
else
cnt_bit <= cnt_bit+1 ;
end
end
assign add_cnt_bit = (end_cnt_sclk);
assign end_cnt_bit = add_cnt_bit && cnt_bit == (8)-1 ;
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
spi_sclk <= 1'b1;
end
else if(cnt_sclk == SCLK_FALL-1)begin
spi_sclk <= 1'b0;
end
else if(cnt_sclk == SCLK_RISE-1)begin
spi_sclk <= 1'b1;
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
spi_mosi <= 1'b0;
end
else if(cnt_sclk == SCLK_FALL-1)begin
spi_mosi <= din[7-cnt_bit];
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
rx_data <= 0;
end
else if(cnt_sclk == SCLK_RISE-1)begin
rx_data[7-cnt_bit] <= miso;
end
end
assign sclk = spi_sclk;
assign mosi = spi_mosi;
assign cs_n = ~req;
assign done = end_cnt_bit;
assign dout = rx_data;
endmodule
flash_read
module flash_read(
input clk ,
input rst_n ,
input rd_id ,
input rd_data ,
input [23:0] rd_addr ,
output trans_req ,
output [7:0] tx_dout ,
input [7:0] rx_din ,
input trans_done ,
output [47:0] dout ,
output [5:0] dout_mask ,
output dout_vld
);
localparam IDLE = 4'b0001,
RDID = 4'b0010,
RDDA = 4'b0100,
DONE = 4'b1000;
localparam CMD_RDID = 8'h9F,
CMD_RDDA = 8'h03;
reg [3:0] state_c ;
reg [3:0] state_n ;
reg [3:0] cnt_byte ;
wire add_cnt_byte;
wire end_cnt_byte;
reg [3:0] byte_num ;
reg [7:0] tx_data ;
reg tx_req ;
reg flag ;
wire idle2rdid ;
wire rdid2done ;
wire idle2rdda ;
wire rdda2done ;
wire done2idle ;
reg [31:0] rx_data ;
reg [47:0] data ;
reg [5:0] data_mask ;
reg data_vld ;
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
state_c <= IDLE ;
end
else begin
state_c <= state_n;
end
end
always @(*) begin
case(state_c)
IDLE :begin
if(idle2rdid)
state_n = RDID ;
else if(idle2rdda)
state_n = RDDA ;
else
state_n = state_c ;
end
RDID :begin
if(rdid2done)
state_n = DONE ;
else
state_n = state_c ;
end
RDDA :begin
if(rdda2done)
state_n = DONE ;
else
state_n = state_c ;
end
DONE :begin
if(done2idle)
state_n = IDLE ;
else
state_n = state_c ;
end
default : state_n = IDLE ;
endcase
end
assign idle2rdid = state_c==IDLE && (rd_id );
assign rdid2done = state_c==RDID && (end_cnt_byte);
assign idle2rdda = state_c==IDLE && (rd_data);
assign rdda2done = state_c==RDDA && (end_cnt_byte);
assign done2idle = state_c==DONE && (1'b1);
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt_byte <= 0;
end
else if(add_cnt_byte) begin
if(end_cnt_byte)
cnt_byte <= 0;
else
cnt_byte <= cnt_byte+1 ;
end
end
assign add_cnt_byte = (state_c != IDLE && trans_done);
assign end_cnt_byte = add_cnt_byte && cnt_byte == (byte_num)-1 ;
always @(*)begin
if(state_c == RDID)
byte_num = 4;
else
byte_num = 8;
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
tx_req <= 1'b0;
end
else if(idle2rdid | idle2rdda)begin
tx_req <= 1'b1;
end
else if(rdid2done | rdda2done)begin
tx_req <= 1'b0;
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
tx_data <= 0;
end
else if(state_c == RDID)begin
case(cnt_byte)
0:tx_data <= CMD_RDID;
default:tx_data <= 0;
endcase
end
else if(state_c == RDDA)begin
case(cnt_byte)
0:tx_data <= CMD_RDDA;
1:tx_data <= rd_addr[23:16];
2:tx_data <= rd_addr[15:8];
3:tx_data <= rd_addr[7:0];
default:tx_data <= 0;
endcase
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
rx_data <= 0;
end
else if(state_c == RDID && trans_done)begin
rx_data <= {rx_data[23:0],rx_din};
end
else if(state_c == RDDA && trans_done)begin
rx_data <= {rx_data[23:0],rx_din};
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
data <= 0;
end
else if(state_c == DONE && ~flag)begin
data <= {4'd0,rx_data[23:20],4'd0,rx_data[19:16],
4'd0,rx_data[15:12],4'd0,rx_data[11:8],
4'd0,rx_data[7:4],4'd0,rx_data[3:0]};
end
else if(state_c == DONE && flag)begin
data <= {"R","D",16'd0,4'd0,rx_data[7:4],4'd0,rx_data[3:0]};
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
data_mask <= 0;
end
else if(state_c == DONE && ~flag)begin
data_mask <= 6'b00_0000;
end
else if(state_c == DONE && flag)begin
data_mask <= 6'b00_1100;
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
data_vld <= 0;
end
else begin
data_vld <= state_c == DONE;
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
flag <= 1'b0;
end
else if(idle2rdda)begin
flag <= 1'b1;
end
else if(idle2rdid)begin
flag <= 1'b0;
end
end
assign tx_dout =tx_data;
assign trans_req = tx_req;
assign dout = data;
assign dout_mask = data_mask;
assign dout_vld = data_vld;
endmodule
flash_write
module flash_write(
input clk ,
input rst_n ,
input write ,
input [ 7:0] wr_data ,
input [23:0] wr_addr ,
output trans_req ,
output [7:0] tx_dout ,
input [7:0] rx_din ,
input trans_done ,
output [47:0] dout ,
output [5:0] dout_mask ,
output dout_vld
);
localparam M_IDLE = 5'b0_0001,
M_WREN = 5'b0_0010,
M_SE = 5'b0_0100,
M_RDSR = 5'b0_1000,
M_PP = 5'b1_0000;
localparam S_IDLE = 5'b0_0001,
S_CMD = 5'b0_0010,
S_ADDR = 5'b0_0100,
S_DATA = 5'b0_1000,
S_DELA = 5'b1_0000;
localparam CMD_WREN = 8'h06,
CMD_SE = 8'hD8,
CMD_RDSR = 8'h05,
CMD_PP = 8'h02;
parameter TIME_DELAY = 16,
TIME_SE = 150_000_000,
TIME_PP = 25_000,
TIME_RDSR = 2000;
reg [4:0] m_state_c ;
reg [4:0] m_state_n ;
reg [4:0] s_state_c ;
reg [4:0] s_state_n ;
reg [3:0] cnt0 ;
wire add_cnt0 ;
wire end_cnt0 ;
reg [3:0] xx ;
reg [31:0] cnt1 ;
wire add_cnt1 ;
wire end_cnt1 ;
reg [31:0] yy ;
reg rdsr_wip ;
reg rdsr_wel ;
reg [2:0] flag ;
reg [7:0] tx_data ;
reg tx_req ;
reg [47:0] data ;
reg [5:0] data_mask ;
reg data_vld ;
wire m_idle2m_wren ;
wire m_wren2m_se ;
wire m_se2m_rdsr ;
wire m_rdsr2m_wren ;
wire m_rdsr2m_pp ;
wire m_wren2m_pp ;
wire m_rdsr2m_idle ;
wire m_pp2m_rdsr ;
wire s_idle2s_cmd ;
wire s_cmd2s_addr ;
wire s_cmd2s_data ;
wire s_cmd2s_dela ;
wire s_addr2s_data ;
wire s_addr2s_dela ;
wire s_data2s_dela ;
wire s_dela2s_idle ;
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
m_state_c <= M_IDLE ;
end
else begin
m_state_c <= m_state_n;
end
end
always @(*) begin
case(m_state_c)
M_IDLE :begin
if(m_idle2m_wren)
m_state_n = M_WREN ;
else
m_state_n = m_state_c ;
end
M_WREN :begin
if(m_wren2m_se)
m_state_n = M_SE ;
else if(m_wren2m_pp)
m_state_n = M_PP ;
else
m_state_n = m_state_c ;
end
M_SE :begin
if(m_se2m_rdsr)
m_state_n = M_RDSR ;
else
m_state_n = m_state_c ;
end
M_RDSR :begin
if(m_rdsr2m_wren)
m_state_n = M_WREN ;
else if(m_rdsr2m_pp)
m_state_n = M_PP ;
else if(m_rdsr2m_idle)
m_state_n = M_IDLE ;
else
m_state_n = m_state_c ;
end
M_PP :begin
if(m_pp2m_rdsr)
m_state_n = M_RDSR ;
else
m_state_n = m_state_c ;
end
default : m_state_n = M_IDLE ;
endcase
end
assign m_idle2m_wren = m_state_c==M_IDLE && (write);
assign m_wren2m_se = m_state_c==M_WREN && (s_dela2s_idle && flag[0]);
assign m_se2m_rdsr = m_state_c==M_SE && (s_dela2s_idle);
assign m_rdsr2m_wren = m_state_c==M_RDSR && (s_dela2s_idle && ~rdsr_wel && ~rdsr_wip && flag[1]);
assign m_rdsr2m_pp = m_state_c==M_RDSR && (s_dela2s_idle && rdsr_wel && ~rdsr_wip && flag[1]);
assign m_wren2m_pp = m_state_c==M_WREN && (s_dela2s_idle && flag[1]);
assign m_rdsr2m_idle = m_state_c==M_RDSR && (s_dela2s_idle && flag[2]);
assign m_pp2m_rdsr = m_state_c==M_PP && (s_dela2s_idle);
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
s_state_c <= S_IDLE ;
end
else begin
s_state_c <= s_state_n;
end
end
always @(*) begin
case(s_state_c)
S_IDLE :begin
if(s_idle2s_cmd)
s_state_n = S_CMD ;
else
s_state_n = s_state_c ;
end
S_CMD :begin
if(s_cmd2s_addr)
s_state_n = S_ADDR ;
else if(s_cmd2s_data)
s_state_n = S_DATA ;
else if(s_cmd2s_dela)
s_state_n = S_DELA ;
else
s_state_n = s_state_c ;
end
S_ADDR :begin
if(s_addr2s_data)
s_state_n = S_DATA ;
else if(s_addr2s_dela)
s_state_n = S_DELA ;
else
s_state_n = s_state_c ;
end
S_DATA :begin
if(s_data2s_dela)
s_state_n = S_DELA ;
else
s_state_n = s_state_c ;
end
S_DELA :begin
if(s_dela2s_idle)
s_state_n = S_IDLE ;
else
s_state_n = s_state_c ;
end
default : s_state_n = S_IDLE ;
endcase
end
assign s_idle2s_cmd = s_state_c==S_IDLE && (m_state_c != M_IDLE);
assign s_cmd2s_addr = s_state_c==S_CMD && (trans_done && (m_state_c == M_SE || m_state_c == M_PP));
assign s_cmd2s_data = s_state_c==S_CMD && (trans_done && m_state_c == M_RDSR);
assign s_cmd2s_dela = s_state_c==S_CMD && (trans_done && m_state_c == M_WREN);
assign s_addr2s_data = s_state_c==S_ADDR && (end_cnt0 && (m_state_c == M_RDSR || m_state_c == M_PP));
assign s_addr2s_dela = s_state_c==S_ADDR && (end_cnt0 && m_state_c == M_SE);
assign s_data2s_dela = s_state_c==S_DATA && (end_cnt0 && m_state_c == M_PP || m_state_c == M_RDSR && end_cnt1);
assign s_dela2s_idle = s_state_c==S_DELA && (end_cnt1);
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt0 <= 0;
end
else if(add_cnt0) begin
if(end_cnt0)
cnt0 <= 0;
else
cnt0 <= cnt0+1 ;
end
end
assign add_cnt0 = (m_state_c != M_RDSR && trans_done);
assign end_cnt0 = add_cnt0 && cnt0 == (xx)-1 ;
always @(*)begin
if(s_state_c == S_CMD)
xx = 1;
else if(s_state_c == S_ADDR)
xx = 3;
else
xx = 4;
end
always @(posedge clk or negedge rst_n) begin
if (rst_n==0) begin
cnt1 <= 0;
end
else if(add_cnt1) begin
if(end_cnt1)
cnt1 <= 0;
else
cnt1 <= cnt1+1 ;
end
end
assign add_cnt1 = (s_state_c == S_DELA || m_state_c == M_RDSR && s_state_c == S_DATA && trans_done);
assign end_cnt1 = add_cnt1 && (cnt1 == (yy)-1 || trans_done && ~rdsr_wip);
always @(*)begin
if((m_state_c == M_WREN || m_state_c == M_RDSR) && s_state_c == S_DELA)
yy = TIME_DELAY;
else if(m_state_c == M_SE)
yy = TIME_SE;
else if(m_state_c == M_PP)
yy = TIME_PP;
else if(m_state_c == M_RDSR && s_state_c == S_DATA)
yy = TIME_RDSR;
else
yy = TIME_DELAY;
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
rdsr_wel <= 1'b0;
rdsr_wip <= 1'b0;
end
else if(m_state_c == M_RDSR && s_state_c == S_DATA && trans_done)begin
rdsr_wel <= rx_din[1];
rdsr_wip <= rx_din[0];
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
flag <= 3'b000;
end
else if(m_idle2m_wren)begin
flag <= 3'b001;
end
else if(m_se2m_rdsr)begin
flag <= 3'b010;
end
else if(m_pp2m_rdsr)begin
flag <= 3'b100;
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
tx_data <= 0;
end
else if(m_state_c == M_WREN)begin
tx_data <= CMD_WREN;
end
else if(m_state_c == M_SE)begin
case(s_state_c)
S_CMD :tx_data <= CMD_SE;
S_ADDR:tx_data <= wr_addr[23-cnt0*8 -:8];
default:tx_data <= 0;
endcase
end
else if(m_state_c == M_RDSR)begin
tx_data <= CMD_RDSR;
end
else if(m_state_c == M_PP)begin
case(s_state_c)
S_CMD :tx_data <= CMD_PP;
S_ADDR:tx_data <= wr_addr[23-cnt0*8 -:8];
S_DATA:tx_data <= wr_data + cnt0;
default:tx_data <= 0;
endcase
end
end
always @(posedge clk or negedge rst_n)begin
if(rst_n==1'b0)begin
tx_req <= 1'b0;
end
else if(s_idle2s_cmd)begin
tx_req <= 1'b1;
end
else if(s_cmd2s_dela | s_addr2s_dela | s_data2s_dela)begin
tx_req <= 1'b0;
end
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
data <= 0;
data_mask <= 0;
end
else if(m_rdsr2m_idle & ~rdsr_wip)begin
data <= {"P","P",16'd0,4'd0,wr_data[7:4],4'd0,wr_data[3:0]};
data_mask <= 6'b001100;
end
else if(m_rdsr2m_idle & rdsr_wip)begin
data <= {"P","P",8'd0,"ERR"};
data_mask <= 6'b001000;
end
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
data_vld <= 0;
end
else begin
data_vld <= m_rdsr2m_idle;
end
end
assign tx_dout = tx_data;
assign trans_req = tx_req;
assign dout_vld = data_vld;
assign dout_mask = data_mask;
assign dout = data;
endmodule
flash_ctrl
module flash_ctrl(
input clk ,
input rst_n ,
input [2:0] key ,
input [ 7:0] wr_din ,
input [23:0] rw_addr ,
output trans_req ,
output [7:0] tx_dout ,
input [7:0] rx_din ,
input trans_done ,
output [47:0] dout ,
output [5:0] dout_mask ,
output dout_vld
);
wire wr_req ;
wire [7:0] wr_dout ;
wire [47:0] wr_data ;
wire [5:0] wr_data_mask ;
wire wr_data_vld ;
wire rd_req ;
wire [7:0] rd_dout ;
wire [47:0] rd_data ;
wire [5:0] rd_data_mask ;
wire rd_data_vld ;
flash_write u_write(
.clk (clk ),
.rst_n (rst_n ),
.write (key[2] ),
.wr_data (wr_din ),
.wr_addr (rw_addr ),
.trans_req (wr_req ),
.tx_dout (wr_dout ),
.rx_din (rx_din ),
.trans_done (trans_done ),
.dout (wr_data ),
.dout_mask (wr_data_mask ),
.dout_vld (wr_data_vld )
);
flash_read u_read(
.clk (clk ),
.rst_n (rst_n ),
.rd_id (key[0] ),
.rd_data (key[1] ),
.rd_addr (rw_addr ),
.trans_req (rd_req ),
.tx_dout (rd_dout ),
.rx_din (rx_din ),
.trans_done (trans_done ),
.dout (rd_data ),
.dout_mask (rd_data_mask ),
.dout_vld (rd_data_vld )
);
assign trans_req = rd_req | wr_req;
assign tx_dout = {8{wr_req}} & wr_dout | {8{rd_req}} & rd_dout;
assign dout_vld = wr_data_vld | rd_data_vld;
assign dout = {48{wr_data_vld}} & wr_data
| {48{rd_data_vld}} & rd_data;
assign dout_mask = {6{wr_data_vld}} & wr_data_mask
| {6{rd_data_vld}} & rd_data_mask;
endmodule
四、参考
【FPGA】FPGA基于spi的flash读写
五、源码
https://github.com/IvanXiang/FPGA_SPI_FLASH
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)