北东地坐标系(NED, north-east-down)
东北天(ENU, east-north-up)
机体坐标系(body frame)
载体坐标系 是以载体为中心,主要作用是处理与传感器直接测得的物理量。
导航坐标系 可以是地固坐标系、地理坐标系等等,通常使用的是当地水平坐标系,俗称有“东北天”、“北东地”坐标系。
机体坐标系
x轴指向机头 z轴向下,右手定则确定y轴
NED坐标系
x轴正北方向,y轴正东方向,z轴向下
飞机欧拉角 pitch+抬头,roll+右倾,yaw+右偏航
yaw与指南针角度
北朝向为0度,东为90度,南为180度,西为270度。Yaw角是当前机头方向与正北方向的夹角
在PX4中用到的是NED坐标系,offboard模式下,初始上电后其东北方向由Yaw角决定,ROS中用到的是ENU坐标系,ENU NED坐标转换
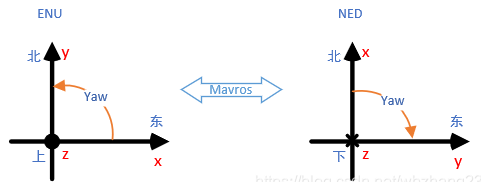
YawN = -YawE +90
XN = YE
YN = XE
ZN = -ZE
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)