以下内容分别借鉴了“清翔 51”,“斌哥51”,以及CSDN“普通的不普通少年”
内部结构:
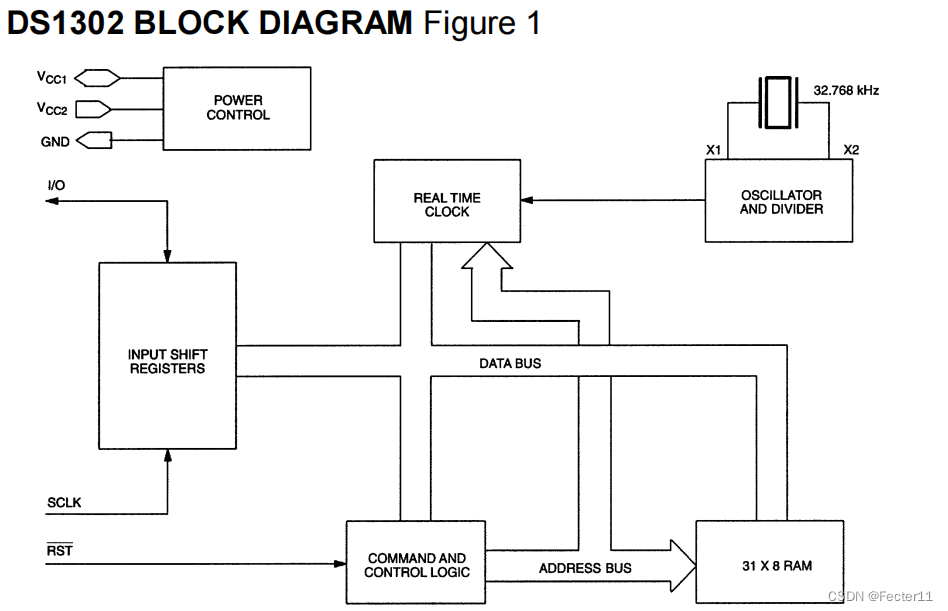
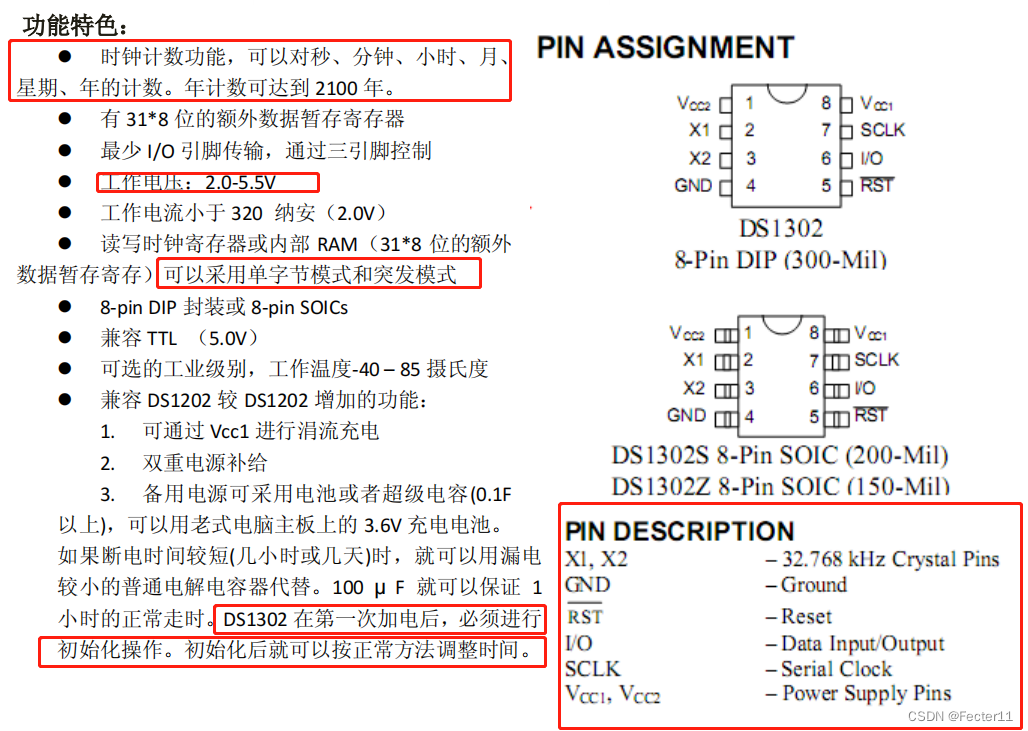
DS1302 包括时钟/日历寄存器和 31 字节(8 位)的数据暂存寄存器,数据通信仅通过一条串行输入输出口。实时时钟/日历提供包括秒、分、时、日期、月份和年份信息。闰年可自行调整,可选择 12 小时制和 24 小时制,可以设置 AM、PM。
使用同步串行通讯简化了 DS1302 与微处理器的接口。与时钟/RAM通讯只需要三根线: CE, I/O (数据线), and SCLK (串行时钟).*
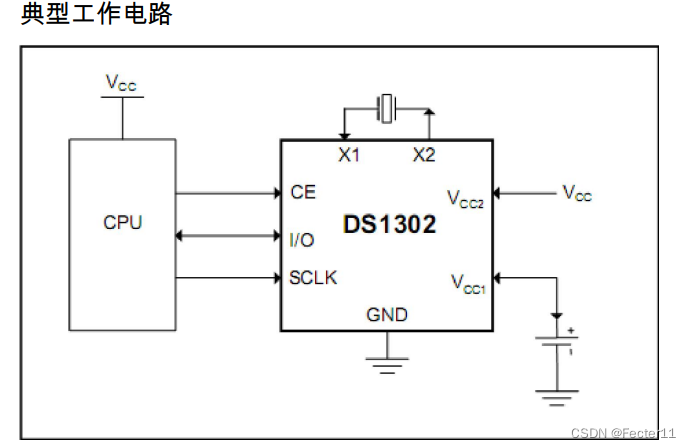
典型应用电路:
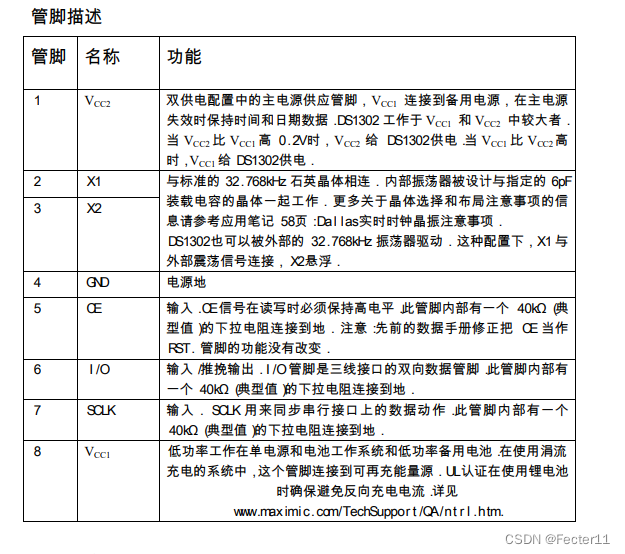
管脚:
供电说明说明
Vcc2是主电源,Vcc1是备用电源。
当Vcc2>Vcc1+0.2v的时候,Vcc2供电
当Vcc2<Vcc1,Vcc1供电
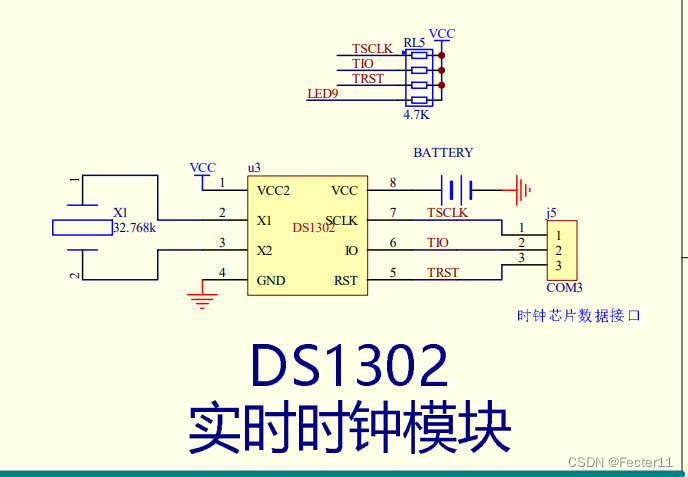
上图是清翔51开发板的DS1302原理图
总结ds1302的引脚:
SCLK:串行时钟输入端,控制数据输入与输出。
I/O:双向输入线
CE:使能端,CE为高时允许DS1302读写数据,CE端为低时DS1302数据不可读写
X1与X2:外接32.768的圆形晶振,给时钟芯片提供晶振频率
控制寄存器(相当于命令控制寄存器)
用于存放ds1302的控制命令,他用于对ds1302的读写进行控制
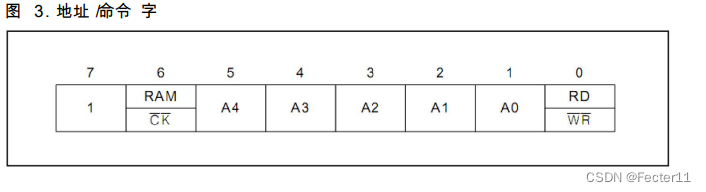
要求命令字的bit7在每一次的数据传输过程中必须置为1,如果置为0,则禁止对ds1302写入数据。
位 6 在逻辑 0时规定为时钟/日历数据,
位6在逻辑 1时为 RAM数据.
位 1 至 位 5 为寄存器的5位地址位,用于选择进行读写的日历,时钟寄存器或者片内RAM
LSB (位 0) 在逻辑0时为写操作(输出)
LSB(位0)为逻辑1时为读操作(输入).命令字以 LSB (位 0)开始总是输入.
与日历时钟相关的寄存器(相当于数据寄存器)
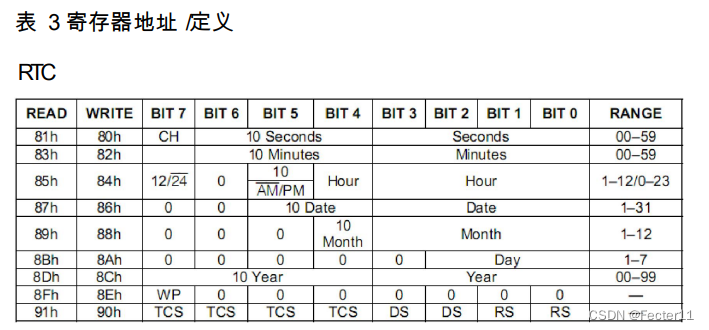
**秒寄存器0x81,0x80:**当CH=0时,DS1302内部时钟运行,反之CH=1停止。
对于数据位,已知秒十位最大为5,个位最大为9,所以高位只需要3位,低位则需要4位。
**分钟寄存器0x83,0x82:**分钟寄存器就只有bit0-bit6作为数据位,bit7为0就好。
**小时寄存器0x85,0x84:**当BIT7为1时为12小时制,当BIT7为0时为24小时制。
**控制寄存器0x8f,0x8e:**当WP为1时,不能对Ds1302做任何操作。
寄存器内容是按照BCD码存放的,如READ:0x83地址读到的0x28代表28分钟。
SPI通信方式:
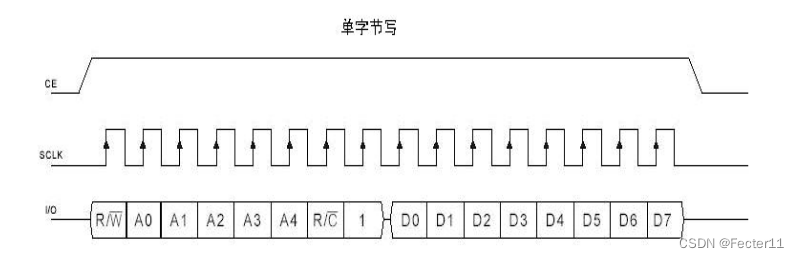
写操作
读操作
写操作描述:
首先要操作ds1302首先得拉高CE口
然后放上要写的数据
最后观察上面的时序图,在控制字指令输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从最低位(0位)开始。
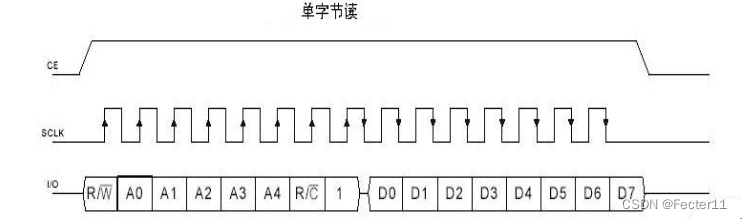
读操作描述:
首先要操作ds1302首先得拉高CE口
在命令字的最后一个上升沿时,我们令SCLK拉低,紧接着就可以读数据了
读出DS1302的数据,读出的数据也是从最低位到最高位。
总结:CE从低到高的的时候,CLK必须为低。
上升沿写入,下降沿读出
写操作:写完命令的紧接着的上升沿写入数据。
读操作:写完命令的紧接着的下降沿读出数据。
注意读写位是低位在前,不管是命令字还是地址。
将BCD码转为十进制码
uchar BCD2DECIMAL(uchar BCD)
{
return(BCD>>4)*10+(BCD & 0x0F);
}
解释一下上面的代码,BCD码比如是0x28,对应的二进制就是0010 1000 我们先右移4位得到0000 0010,换为十进制就是2,然后乘10得到20。然后用BCD码按位操作与上0x0F 换成二进制就是0000 1000 & 0010 1000 得到了0000 1000换成十进制就是8,然后将20+8得到十进制数28。显然我们的目的就是28。与BCD码对应上了。
BCD码0x28的含义就是将高四位看做十位,低四位看做个位,来直观表示我们的数值,但并非真正意义上的十进制。
我么看做是少了ABCDEF的16进制。
**十进制数转8421码 **
往时钟芯片写入数据时,需将待写的十进制数转换为8421码。
unsigned char hex_to_bcd(unsigned char data)
{
unsigned char temp;
temp = (((data/10)<<4) + (data%10));
return temp;
}
解释上面的代码,将一个十进制数先对10整除,然后左移至高4位。然后对这个十进制数取余,然后加上刚才算好的高位数据,就是BCD码。
复位以及时钟控制:
所有的数据传输在RST置一时进行(反复强调), 输入信号有两种功能:
首先,RST 接通控制逻辑,允许地址/命令序列送入移位寄存器;
其次,RST 提供终止单字节或多字节数据的传送手段。
当 RST 为高电平时,所有的数据传送被初始化,允许对 DS1302 进行操作。
如果在传送过程中 RST 置为低电平,则会终止此次数据传送,I/O 引脚变为高阻态。
上电运行时,在 Vcc≥2.5V 之前,RST 必须保持低电平。只有在 SCLK 为低电平时,才能将 RST 置为高电平。
I/O 为串行数据输入输出端(双向),后面有详细说明。SCLK 始终是输入端。
数据输入:
经过 8 个时钟周期的控制字节的输入,一个字节的输入将在下 8 个时钟周期的上升沿完成,数据传输从字节最低位开始。
数据输出:
经过 8 个时钟周期的控制读指令的输入,控制指令串行输入后,一个字节的数据将在下个 8 个时钟周期的下降沿被输出,注意第一位输出是在最后一位控制指令所在脉冲的下降沿被输出,要求 RST 保持位高电平。
同理 8 个时钟周期的控制读指令如果指定的是突发模式,将会在脉冲的上升沿读入数据,下降沿读出数据,突发模式一次可进行多字节数据的一次性读写,只要控制好脉冲就行了。
主函数:
# include <reg51.h>
# include "display.h"
# include "ds1302.h"
uchar sec = 0,minu = 0,hour = 0;
uint j ;
void main (void)
{
Lcd1602_Write_CMD(0x01);
Lcd1602_Write_CMD(0x06);
Lcd1602_Write_CMD(0x0C);
Lcd1602_Write_CMD(0x38);
ds1302_Writedata(0x8E,0x00);
ds1302_Writedata(0x80,0x12);
ds1302_Writedata(0x82,0x56);
ds1302_Writedata(0x84,0x13);
ds1302_Writedata(0x8E,0x80);
LCD_Position(1,0);
LCD_dispaly("welcome!!Testing");
while(1)
{
sec = ds1302_Readdata(0x81);
minu = ds1302_Readdata(0x83);
hour = ds1302_Readdata(0x85);
LCD_Position(0,0);
Lcd1602_Write_DAT(hour/16 + '0');
Lcd1602_Write_DAT(hour%16 + '0');
Lcd1602_Write_DAT(':');
Lcd1602_Write_DAT(minu/16 + '0');
Lcd1602_Write_DAT(minu%16 + '0');
Lcd1602_Write_DAT(':');
Lcd1602_Write_DAT(sec/16 + '0');
Lcd1602_Write_DAT(sec%16 + '0');
j=50000;
while(j--);
}
}
ds1302.c
# include "ds1302.h"
void ds1302_WriteB(uchar dat)
{
uchar i = 0;
for(i= 0;i<8;i++)
{
CLK = 0;
_nop_();
IO = dat & 0x01;
_nop_();
CLK = 1;
_nop_();
dat>>=1;
}
}
uchar ds1302_ReadB()
{
uchar i = 0;
uchar rdata = 0;
for(i=0;i<8;i++)
{
rdata>>=1;
CLK = 0;
_nop_();
if(IO==1)
rdata = rdata | 0x80;
else
rdata = rdata | 0x00;
CLK = 1;
_nop_();
}
return rdata;
}
void ds1302_Writedata(uchar addr,uchar dat)
{
CE = 0;
CLK = 0;
CE = 1;
ds1302_WriteB(addr);
ds1302_WriteB(dat);
CLK = 0;
CE = 0;
}
uchar ds1302_Readdata(uchar addr)
{
uchar temp = 0;
CE = 0;
CLK = 0;
CE = 1;
ds1302_WriteB(addr);
temp = ds1302_ReadB();
return temp;
}
ds1302.h
# ifndef __ds1302_H__
# define __ds1302_H__
# include<reg51.h>
# include<intrins.h>
# define uchar unsigned char
# define uint unsigned int
sbit CLK = P1^0;
sbit IO = P1^1;
sbit CE = P1^2;
void ds1302_WriteB(uchar dat);
uchar ds1302_ReadB();
void ds1302_Writedata(uchar addr,uchar dat);
uchar ds1302_Readdata(uchar addr);
# endif
lcd1602.c
# include "lcd1602.h"
# define uchar unsigned char
# define uint unsigned int
void Lcd1602_busycheck()
{
uint sta = 0;
Dataport = 0xff;
RS = 0;
RW = 1;
do
{
E = 1;
sta = Dataport;
E = 0;
}while((sta & 0x80) == 0x80);
}
void Lcd1602_Write_DAT(uchar Dat)
{
Lcd1602_busycheck();
RS = 1;
RW = 0;
Dataport = Dat;
E = 1;
_nop_();
E = 0;
}
void Lcd1602_Write_CMD(uchar Comd)
{
Lcd1602_busycheck();
RS = 0;
RW = 0;
Dataport = Comd;
E = 1;
_nop_();
E = 0;
}
lcd1602.h
# ifndef __lcd1602_H__
# define __lcd1602_H__
# include <reg51.h>
# include <intrins.h>
# define uchar unsigned char
# define uint unsigned int
# define Dataport P0
sbit RS = P3^5;
sbit RW = P3^6;
sbit E = P3^4;
void Lcd1602_busycheck();
void Lcd1602_Write_DAT(uchar Dat);
void Lcd1602_Write_CMD(uchar Comd);
# endif
dsiplay.h
# ifndef __display_H__
# define __display_H__
# include "lcd1602.h"
# define uchar unsigned char
# define uint unsigned int
void LCD_dispaly(uchar* str);
void LCD_Position(bit x,uchar y) ;
#endif
display.c
主要包含了lcd显示字符串的函数,显示位置函数
# include "display.h"
void LCD_dispaly(uchar* str)
{
while(*str)
{
Lcd1602_Write_DAT(*str++) ;
}
}
void LCD_Position(bit x,uchar y)
{
uchar position;
if(x == 0)
position = 0x80 + y;
else
position = 0xC0 + y;
Lcd1602_Write_CMD(position);
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)