一、了解越疆dobot机械臂
详细信息可以查看用户手册和API开发手册,以及其它官方提供资料,这里我只列出我在开发过程中遇到的问题,以及需要了解的知识点。
(1)坐标系
我们可以看到这里涉及的坐标系主要是两种,一种是关节坐标系,一直是笛卡尔坐标系。我们可以通过命令获取到这两组坐标系的值,后面详细说明。
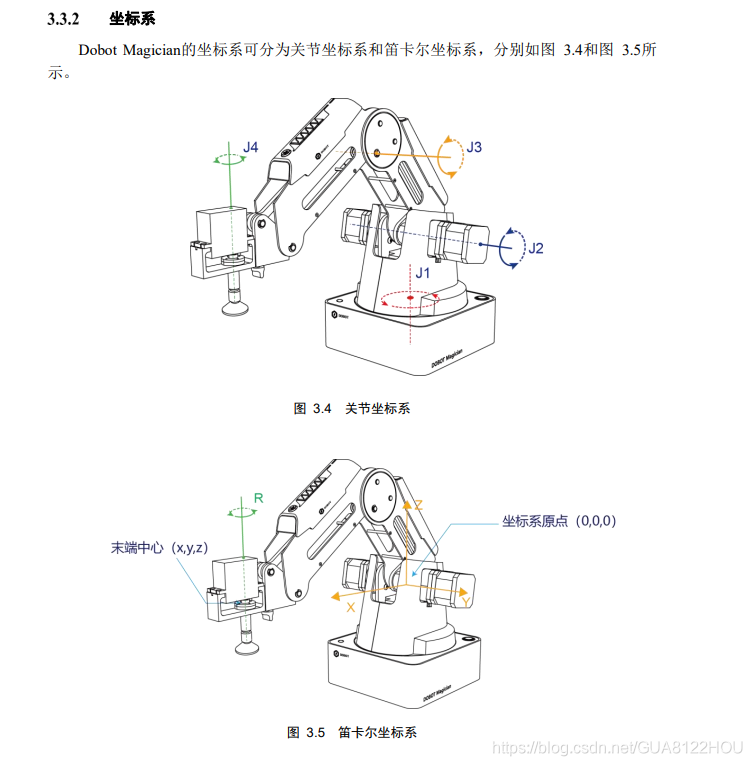
关节坐标系:以各运动关节为参照确定的坐标系。
若Dobot Magician未安装末端套件,则包含三个关节:J1、J2、J3,且均为旋转关节,逆时针为正。
若Dobot Magician安装带舵机的末端套件,如吸盘和夹爪套件,则包含四个关节:J1、J2、J3和J4,均为旋转关节,逆时针为正。
笛卡尔坐标系:以机械臂底座为参照确定的坐标系。
坐标系原点为大臂、小臂以及底座三个电机三轴的交点。
X轴方向垂直于固定底座向前。
Y轴方向垂直于固定底座向左。
Z轴符合右手定则,垂直向上为正方向。
R轴为末端舵机中心相对于原点的姿态,逆时针为正。当安装了带舵机的末端套件时,才存在R轴。R轴坐标为J1轴和J4轴坐标之和。
(2)运动模式
本款机械臂主要有括点动模式、点位模式(PTP)、圆弧运动模式(ARC)。PTP和ARC可总称为存点再现运动模式。 三种运动模式,
(1)点动模式即示教时移动机械臂的坐标系,使机械臂移动至某一点。Dobot Magician的坐标系可分为笛卡尔坐标系和关节坐标系,用户可单击笛卡尔坐标系按钮或关节坐标系按钮移动机械臂。
笛卡尔坐标系模式:
单击“X+”、“X-”,机械臂会沿X轴正负方向移动。
单击“Y+”、“Y-”,机械臂会沿Y轴正负方向移动。
单击“Z+”、“Z-”,机械臂会沿Z轴正负方向移动。
单击“R+”、“R-”,机械臂末端姿态会沿R轴正负方向旋转。
关节坐标系模式:
单击“J1+”、“J1-”,可控制底座电机正负方向旋转。
单击“J2+”、“J2-”,可控制大臂电机正负方向旋转。
单击“J3+”、“J3-”,可控制小臂电机正负方向移动。
单击“J4+”、“J4-”,可控制末端舵机正负方向旋转。
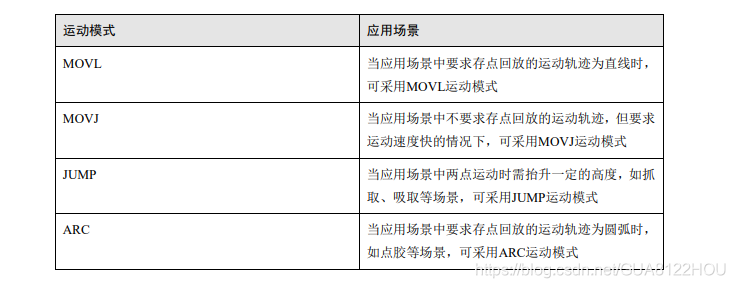
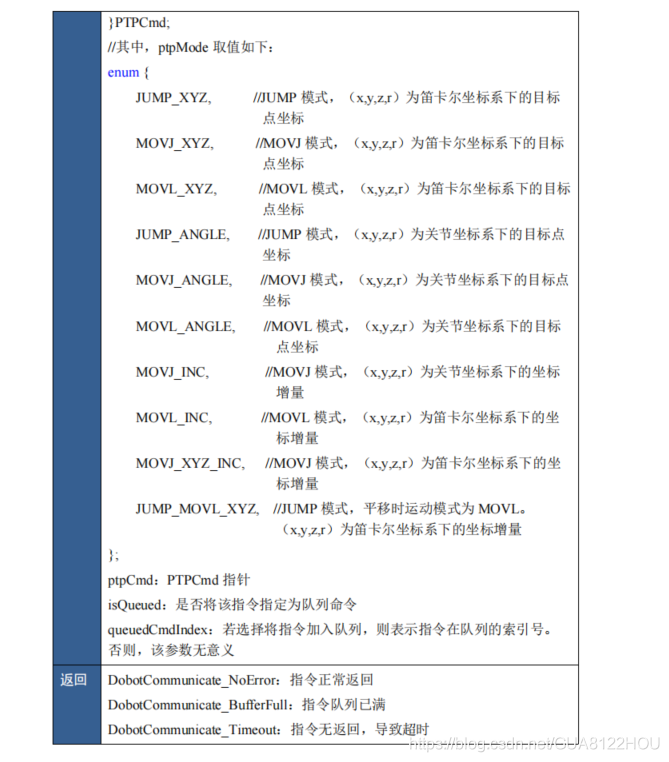
(2)点位模式即实现点到点运动,Dobot Magician的点位模式包括MOVJ、MOVL以及JUMP三种运动模式。不同的运动模式,示教后存点回放的运动轨迹不同。
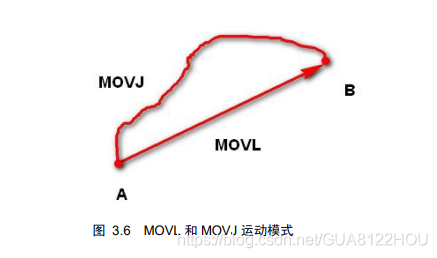
MOVJ:关节运动,由A点运动到B点,各个关节从A点对应的关节角运行至B点对应的关节角。关节运动过程中,各个关节轴的运行时间需一致,且同时到达终点,如图 3.6所示。
MOVL:直线运动,A点到B点的路径为直线,如图 3.6所示。
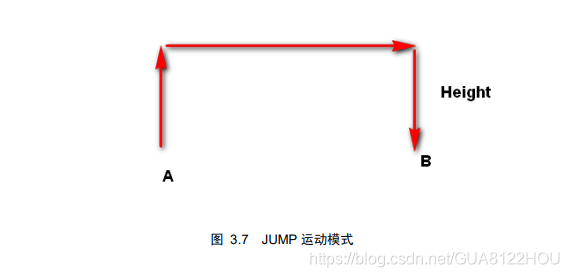
JUMP:门型轨迹,A点到B点以MOVJ运动模式移动,如图 3.7所示。
以MOVJ运动模式上升到一定高度(Height)。
以MOVJ运动模式平移到B点上方的高度处。
以MOVJ运动模式下降到B点所在位置。
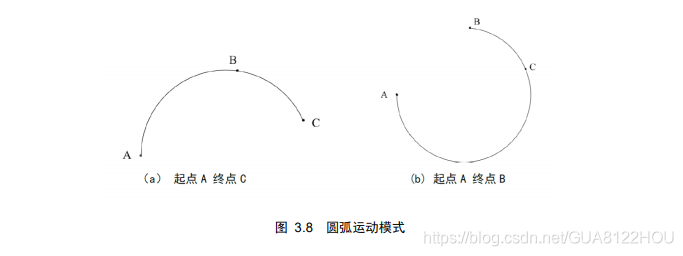
(3)圆弧模式即示教后存点回放的运动轨迹为圆弧。圆弧轨迹是空间的圆弧,由当前点、圆弧上任一点和圆弧结束点三点共同确定。圆弧总是从起点经过圆弧上任一点再到结束点,如图 3.8所示。
几种方式的运用场景:
API接口
官方提供的接口函数有几百个,我们可以根据需要使用,其实我们这里也就常用的有几个接口而已,可以根据需要去使用,下面我们开始正式进入机械臂控制编程。
二、使用python,编写通过ros服务控制机械臂运动程序
注意后面运行python脚本的时候,要先开启机械臂的服务,直接使用一下指令即可
roslaunch dobot DobotServer.launch
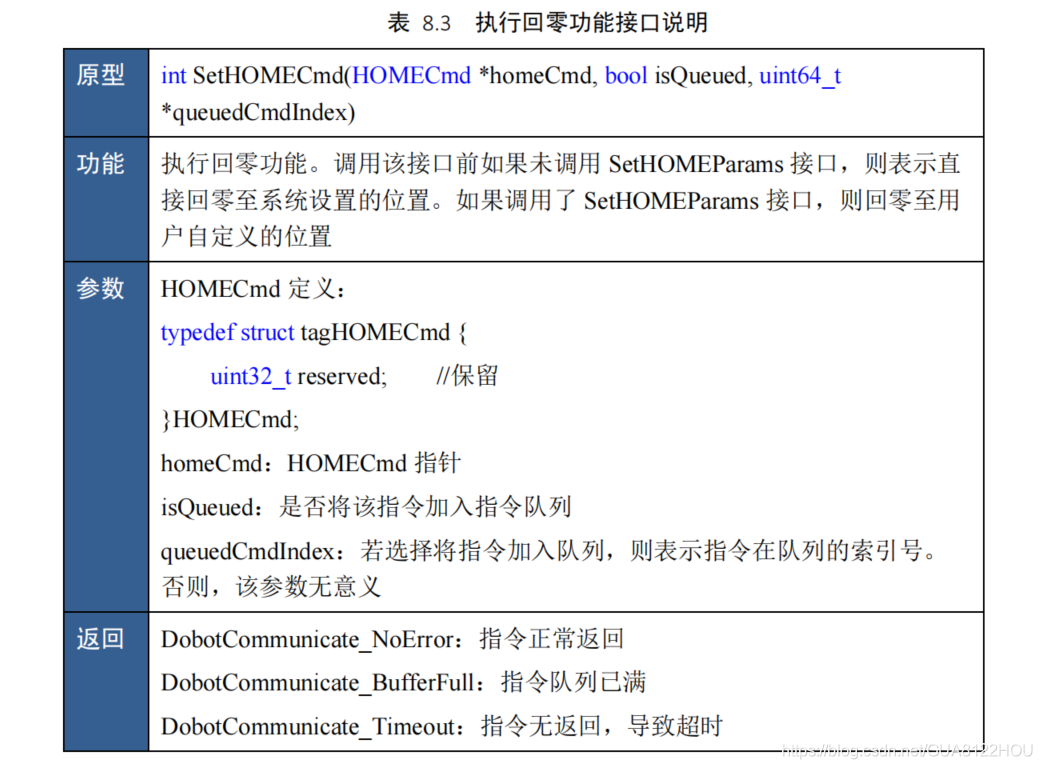
(1)设置机械臂的归零状态:
SetHOMECmd.py(调用SetHOMECmd服务,编写client,这里函数接口已经通过服务方式进行封装好了我们直接可以使用)
import rospy
from dobot.srv import SetHOMECmd
if __name__ == "__main__":
rospy.init_node('testDobot')
rospy.wait_for_service('DobotServer/SetHOMECmd')
try:
client = rospy.ServiceProxy('DobotServer/SetHOMECmd',SetHOMECmd)
response = client()
except rospy.ServiceException, e:
print "Service call failed: %s"%e
这是我在API里找到的函数原型,我们直接使用系统的回零接口即可。
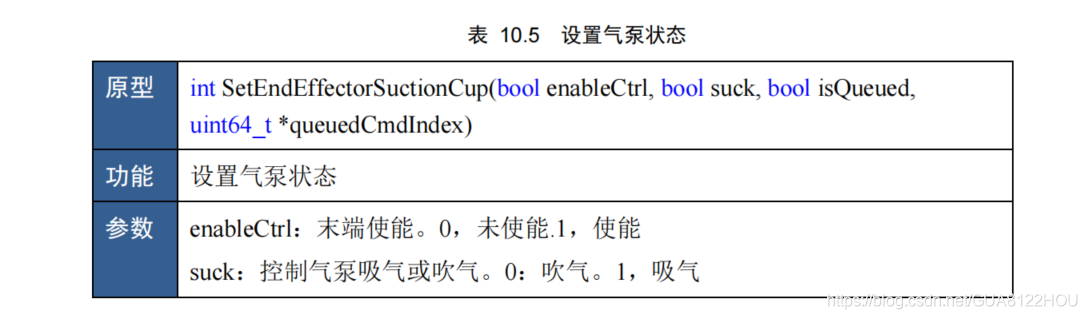
(2)设置机械臂末端吸取器的状态
SetEndEffectorSuctionCup.py
import rospy
from dobot.srv import SetEndEffectorSuctionCup
if __name__ == "__main__":
rospy.init_node('testDobot')
rospy.wait_for_service('DobotServer/SetEndEffectorSuctionCup')
try:
client = rospy.ServiceProxy('DobotServer/SetEndEffectorSuctionCup',SetEndEffectorSuctionCup)
response = client(1,1,True)
except rospy.ServiceException, e:
print "Service call failed: %s"%e
这里需要传递两个参数,分别表示气泵是否使能以及吹吸气状态。
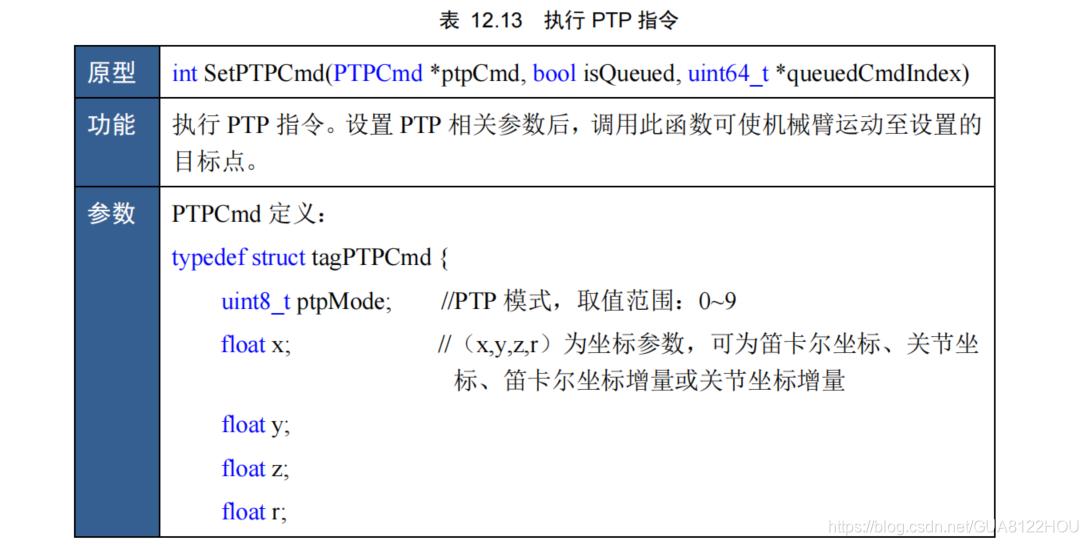
(3)执行 PTP 指令
设置机械臂运动的目的坐标,这里一共需要传递五个参数,通过官方的API接口可以看到每一个参数的意思。
import rospy
from dobot.srv import SetPTPCmd
if __name__ == "__main__":
rospy.init_node('testDobot')
rospy.wait_for_service('DobotServer/SetPTPCmd')
try:
client = rospy.ServiceProxy('DobotServer/SetPTPCmd',SetPTPCmd)
response = client(1,-2.2,258,121,-10)
except rospy.ServiceException, e:
print "Service call failed: %s"%e
可以看到,第一个代表PTP模式的设置,后面四个参数主要是描述坐标系的相关量。我们这个工程主要使用模式1,MOVJ模式和笛卡尔坐标系了,这就用到了博文开头提到的坐标系和模式介绍。
(4)整合相关接口,实现完整的一个实现流程。
首先,我们先理一下我们的思路。
我们的流程就是:建图——>导航——>识别——>抓取——>移动到目标点——>投递——>(回到第三步,反复识别抓取投递)。
今天这里研究的是抓取。我们通过识别邮件的信息和位置,然后通过机械臂去抓取。我们车导航到分拣台,但是邮件的位置是一个不知道的位置,我们首先通过摄像头去进行一个图像分割,检测到邮件出现在我们摄像头里面,就可以算出邮件的中心点相对于摄像头图像中心点的差值,我们分别返回相差的X,Y值,然后控制机械臂运动去抓取。
我们首先可以知道现在的机械臂末端位置的X,Y,Z坐标(我们使用的就是笛卡尔坐标系,可以获得当前坐标点的一个坐标)然后我们可以通过X,Y分别加上我们放回的值然后移动机械臂去抓他是吧,听着确实也好懂。
当时,我们得考虑一下临界值,就是实际上Y,Z的值分别是有第二和第三连接角进行控制的,至于X只是底盘的一个值可以不用多讨论。而我们的Y变化是和Z有关的,所以我们需要测出这个范围值。
其实在思考这里的时候,我首先想到的不是上面这个样子直接对左边进行的一个加减。我之前做垃圾桶的时候进行的分拣,那里实际上用到了计算机械臂的逆解,当时是个六自由度的机械臂,这里是四自由度的一个机械臂,相对要简单一些,不过这里四自由度逆解算法手上没有现成的,也就没有使用算逆解的方式。后面有机会在补充试试。而且这里实际上也不要那么麻烦。
我们只要在固定的高度Z测试一下范围即可。因为我们首先是在一个固定的定去识别邮件,首先记录这个点的高度,然后我们需要降到桌面去吸取邮件,这是第二个高度,我们只需要测定这两个高度Z的前提下,Y的移动范围就可以了!
下面是我写的一个简单的测试程序:
import rospy
import time
from dobot.srv import SetPTPCmd
if __name__ == "__main__":
new_y = -250
x = 7
y = -17
r = -170
rospy.init_node('PTP_Dobot')
rospy.wait_for_service('DobotServer/SetPTPCmd')
try:
PTP_client = rospy.ServiceProxy('DobotServer/SetPTPCmd',SetPTPCmd)
while True:
new_y += 2
response = PTP_client(1, x, new_y, z, r)
print("publish ok,new_y is:", new_y)
time.sleep(0.5)
except rospy.ServiceException, e:
print "Service call failed: %s"%e
这里实在Z值固定的范围下对x,y进行测试,由于x的范围很大,不会超出其范围,所以只对y进行测试即可。
这里最终机械臂会进行报错,由于是软件报错,所以可以直接使用警报清除命令:rosservice call /DobotServer/ClearAllAlarmsState就可以恢复。
这是我们测试的几组值,其实可以看到X一定的情况下,Y的范围取决于Z值高的,也不难想,机械臂越高,那么Y轴可移动空间越小,所以建议以高的为限制。
当Y=-310时,Z的范围是 -90~100
当Y=-300时, Z的范围是 -100 ~120
当Y=-290时,Z的范围是 -110~135
注意,这里下方有气泵阻挡,所以Y不能大于-235
当Y=-235时,Z的范围是 -140~165
Z=85 Y的范围是 -310 ~ -190
Z=55 Y的范围是 -320 ~ -175
Z= 95 Y的范围是 -310 ~-190
Z= -17 Y的范围是 -328 ~ -174
今天大概就到这里!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)