目录
- 前言
- 1 ROS简介
- 2 ROS软件安装
- 2.1 添加ROS软件源
- 2.2 添加密钥
- 2.3 安装ROS
- 2.4 初始化rosdep
- 2.5 设置环境变量
- 2.6 安装rosinstall
- 3 ROS初试——小海龟
- 3.1 启动ROS Master
- 3.2 启动小海龟仿真器
- 3.3 控制海龟控制节点
- 4 ROS话题发布和订阅节点
- 4.1 创建话题发布者Publisher
- 4.2 创建话题订阅者Subscriber
- 4.3 编译功能包
- 4.4 运行Publisher和Subscriber
- 4.5 测试结果
- 5 控制小海龟走圆形
- 5.1 建立ROS工作空间
- 5.2 配置环境变量
- 5.3 ROS机器人画圆程序的编写
- 5.4 启动ROS机器人
- 总结
前言
环境 Ubuntu18.04
1 ROS简介
ROS(机器人操作系统,Robot Operating System),是专为机器人软件开发所设计出来的一套电脑操作系统架构。它是一个开源的元级操作系统(后操作系统),提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理,它也提供一些工具和库用于获取、建立、编写和执行多机融合的程序。
ROS的运行架构是一种使用ROS通信模块实现模块间P2P的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括:
- 基于服务的同步RPC(远程过程调用)通讯;
- 基于Topic的异步数据流通讯,还有参数服务器上的数据存储。
2 ROS软件安装
2.1 添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

2.2 添加密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654

2.3 安装ROS
sudo apt update
sudo apt-get install ros-melodic-desktop-full
注意:需要根据Ubuntu的版本选择合适的ROS版本。否则会出现Unable to locate package ros-kinetic-desktop-full的错误。ROS的版本主要有Melodic、Lunar、Kinetic版本,根据linux系统不同选择合适的版本
2.4 初始化rosdep
sudo rosdep init
rosdep update
- 出现
ERROR: cannot download default sources list from: https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list Website may be down.的错误
cd /etc
sudo gedit hosts
在文本后面添加(ip是通过https://site.ip138.com进行输入raw.githubusercontent.com查询获取得到,任意选择一个)
ip raw.githubusercontent.com
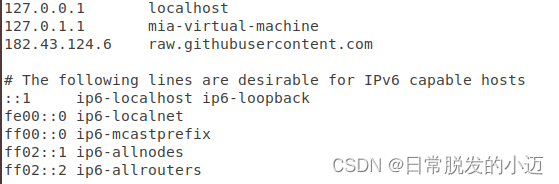
修改好后,结果如下
2.5 设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
2.6 安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
3 ROS初试——小海龟
3.1 启动ROS Master
roscore
3.2 启动小海龟仿真器
rosrun turtlesim turtlesim_node
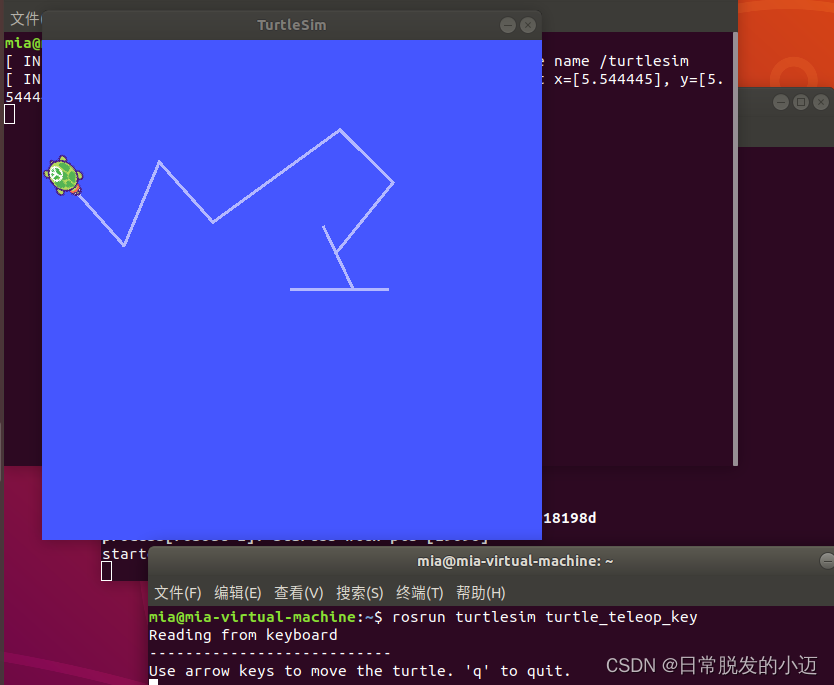
3.3 控制海龟控制节点
rosrun turtlesim turtle_teleop_key
实现结果如下
4 ROS话题发布和订阅节点
首先创建一个功能包,命名为topic,添加roscpp,rospy等依赖项。
4.1 创建话题发布者Publisher
Publisher的主要作用是针对制定话题发布特定数据类型的消息。我们用代码实现一个节点,并且在节点中创建一个Publisher并发布字符串“Hello World”,代码如下:
#include <sstream>
#include "ros/ros.h"
#include "std_msgs/String.h"
int main(int argc, char **argv)
{
ros::init(argc,argv,"talker");
ros::NodeHandle n;
ros::Publisher chatter_pub =n.advertise<std_msgs::String>("chatter",1000);
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss <<"hello world" << count;
msg.data = ss.str();
ROS_INFO("%s",msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
4.2 创建话题订阅者Subscriber
下面创建一个Subscriber以订阅Publisher节点发布的“Hello World”字符串,实现代码如下:
#include "ros/ros.h"
#include "std_msgs/String.h"
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]",msg->data.c_str());
}
int main (int argc, char **argv)
{
ros::init(argc,argv,"listener");
ros::NodeHandle n;
ros::Subscriber sub=n.subscribe("chatter",1000,chatterCallback);
ros::spin();
return 0;
}
4.3 编译功能包
编辑该功能包的CMakeLists.txt文件,如下:
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
##add_executable(hello ~/Alltest/catkin_ws/src/learning_communication/src/hello.cpp)
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker ${PROJECT_NAME}_generate_messages_cpp)
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
4.4 运行Publisher和Subscriber
在工作空间根目录设置环境变量并编译:
source devel/setup.bash
catkin_make
4.5 测试结果
需要运行三个终端,分别运行roscore,发布节点,订阅节点
- 运行roscore,在第一个终端输入:
roscore
- 运行话题发布者,在第二个终端中输入:
source ./devel/setup.bash
rosrun topic_pub_sub publisher
- 运行话题订阅者,在第三个终端中输入:
source ./devel/setup.bash
rosrun topic_pub_sub subscriber
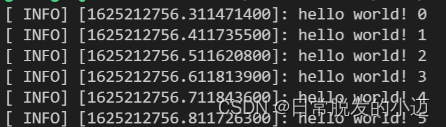
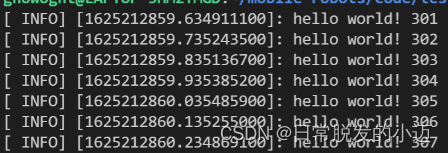
结果如下:
5 控制小海龟走圆形
5.1 建立ROS工作空间
与上述步骤相同,不做赘述
5.2 配置环境变量
在catkin_ws路径下终端输入
source devel/setup.bash
使系统知道功能包放置在catkin_ws这个工作空间下。
查看当前环境变量,终端输入
echo $ROS_PACKAGE_PATH

5.3 ROS机器人画圆程序的编写
打开终端,在catkin_ws/src路径下新建my_turtle_package包
catkin_create_pkg my_turtle_package rospy roscpp

在my_turtle_package/src 中创建cpp文件
gedit draw_circle.cpp
编写代码如下:
#include "ros/ros.h"
#include<geometry_msgs/Twist.h>
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_ctrl");
ros::NodeHandle n;
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
ROS_INFO("draw_circle start...");
while(ros::ok())
{
geometry_msgs::Twist vel_cmd;
vel_cmd.linear.x = 2.0;
vel_cmd.linear.y = 0.0;
vel_cmd.linear.z = 0.0;
vel_cmd.angular.x = 0;
vel_cmd.angular.y = 0;
vel_cmd.angular.z = 1.8;
vel_pub.publish(vel_cmd);
ros::spinOnce();
}
return 0;
}
打开CMakeLists.txt,在CMakeLists.txt文件中找到##Declare a C++ executable,在这一行的前面添加如下内容:
add_executable(draw_circle src/draw_circle.cpp)
target_link_libraries(draw_circle ${catkin_LIBRARIES})
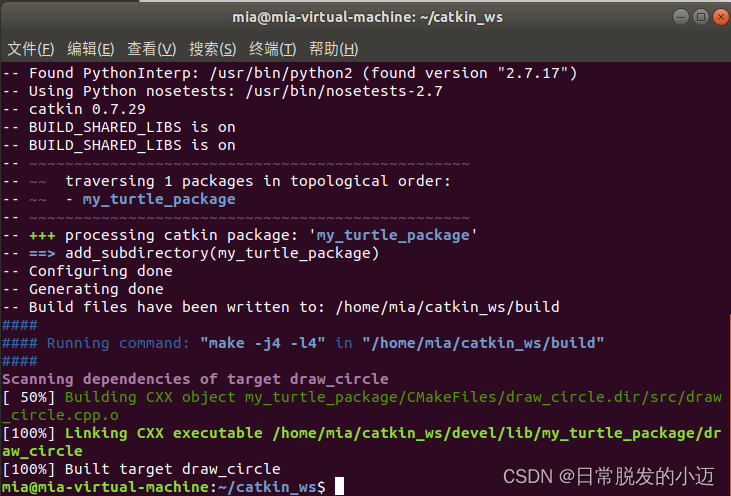
保存并退出CMakeLists.txt文件。然后在terminal中继续输入如下命令进行编译:
cd ~/catkin_ws/
catkin_make
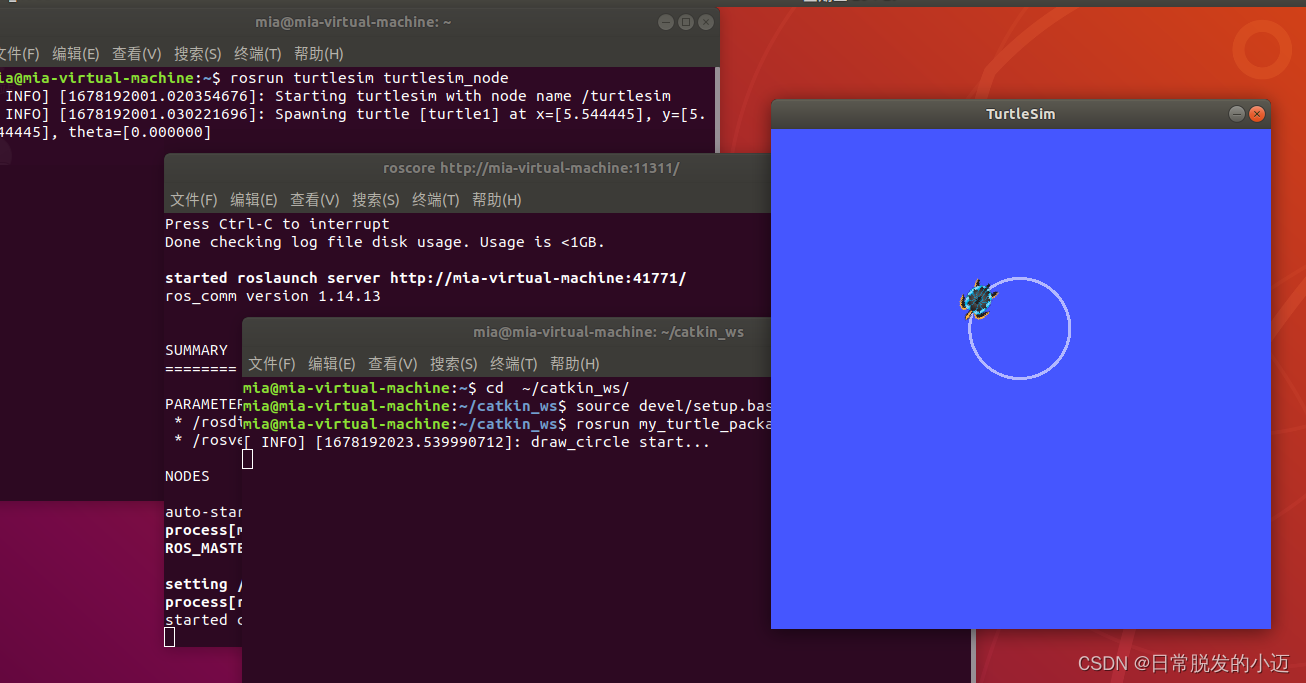
5.4 启动ROS机器人
- 打开第一个终端(terminal),启动ros
roscore
- 打开第二个终端(terminal),启动rosnode
rosrun turtlesim turtlesim_node
- 打开第三个终端(terminal),启动my_turtle_package节点
cd ~/catkin_ws/
source devel/setup.bash
rosrun my_turtle_package draw_circle
结果如下:
总结
通过本次作业,熟悉了解了ROS,安装ROS的整个过程,首先需要选择对应版本的ROS,在安装的过程中出现了许多问题,在查询相关资料后,都可以基本解决。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)