相信很多电子专业的同学都做过循迹小车这个小玩意儿,而在我们刚刚接触巡线的时候都是用的两个循迹模块(如下图)
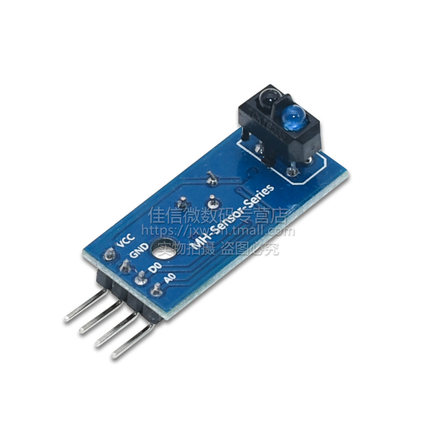
左边的模块检测到黑线了就说明我车子的方向偏右了就需要往左转,同理,右边检测到黑线时我就需要往左转。
这样就会形成一种这样的蛇形巡线效果
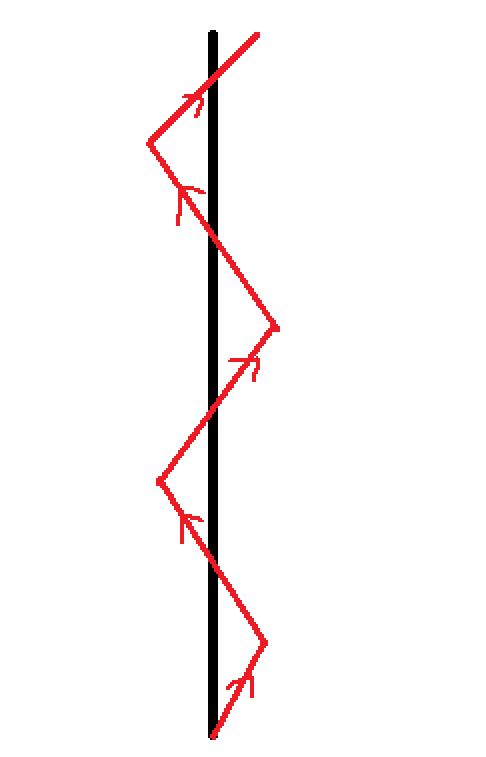
这种巡线的方法虽然简单,但也十分具有局限性。只有在小车方向偏离程度很大时(也就是小车的一边的传感器碰到黑线时)才能进行方向的校正。而方向的校正就是让车子保持往一个方向的旋转(例如左边轮子往前,右边轮子往后,就达成顺时针旋转的效果),然后通过不同长度的延时完成转弯角度的大小,这种方法实在是不够优雅,于是在实验室小伙伴的介绍下,通过PID算法完成一种更优化的巡线。
当然细心的同学可能会发现问题,就两个循迹模块用PID的意义何在?这里的前提是我们的实验是基于四个循迹模块的巡线。
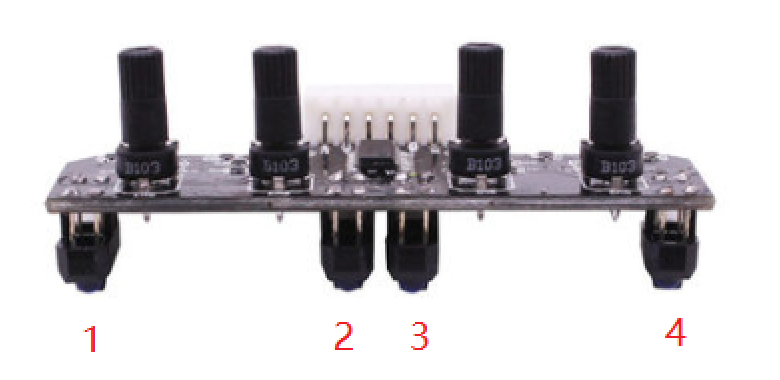
PID巡线具体思路
来一段伪代码:
if(2号循迹检测到黑线)
计偏差为-1
if(1号和2号黑线同时检测到黑线)
计偏差为-2
if(1号检测到黑线)
计偏差为-3
同理,当3号、3,4同时、4号检测到黑线时,分别记偏差为1、2、3
然后通过PID运算来调整两边电机的差速就可以实现一种比较顺滑的巡线
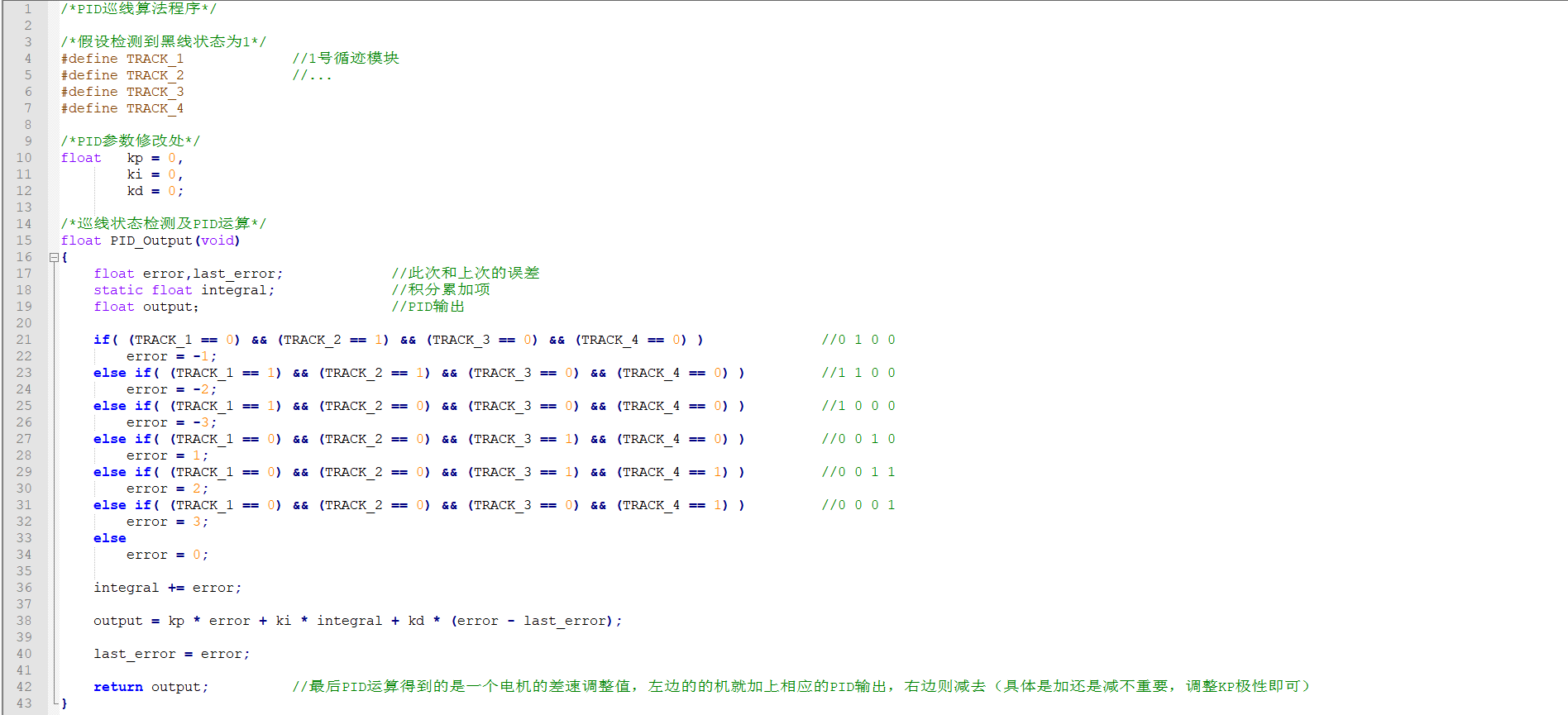
实现代码:
/*PID巡线算法程序*/
/*假设检测到黑线状态为1*/
#define TRACK_1 //1号循迹模块
#define TRACK_2 //...
#define TRACK_3
#define TRACK_4
/*PID参数修改处*/
float kp = 0,
ki = 0,
kd = 0;
/*巡线状态检测及PID运算*/
float PID_Output(void)
{
float error,last_error; //此次和上次的误差
static float integral; //积分累加项
float output; //PID输出
if( (TRACK_1 == 0) && (TRACK_2 == 1) && (TRACK_3 == 0) && (TRACK_4 == 0) ) //0 1 0 0
error = -1;
else if( (TRACK_1 == 1) && (TRACK_2 == 1) && (TRACK_3 == 0) && (TRACK_4 == 0) ) //1 1 0 0
error = -2;
else if( (TRACK_1 == 1) && (TRACK_2 == 0) && (TRACK_3 == 0) && (TRACK_4 == 0) ) //1 0 0 0
error = -3;
else if( (TRACK_1 == 0) && (TRACK_2 == 0) && (TRACK_3 == 1) && (TRACK_4 == 0) ) //0 0 1 0
error = 1;
else if( (TRACK_1 == 0) && (TRACK_2 == 0) && (TRACK_3 == 1) && (TRACK_4 == 1) ) //0 0 1 1
error = 2;
else if( (TRACK_1 == 0) && (TRACK_2 == 0) && (TRACK_3 == 0) && (TRACK_4 == 1) ) //0 0 0 1
error = 3;
else
error = 0;
integral += error;
output = kp * error + ki * integral + kd * (error - last_error);
last_error = error;
return output; //最后PID运算得到的是一个电机的差速调整值,左边的的机就加上相应的PID输出,右边则减去(具体是加还是减不重要,调整KP极性即可)
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)