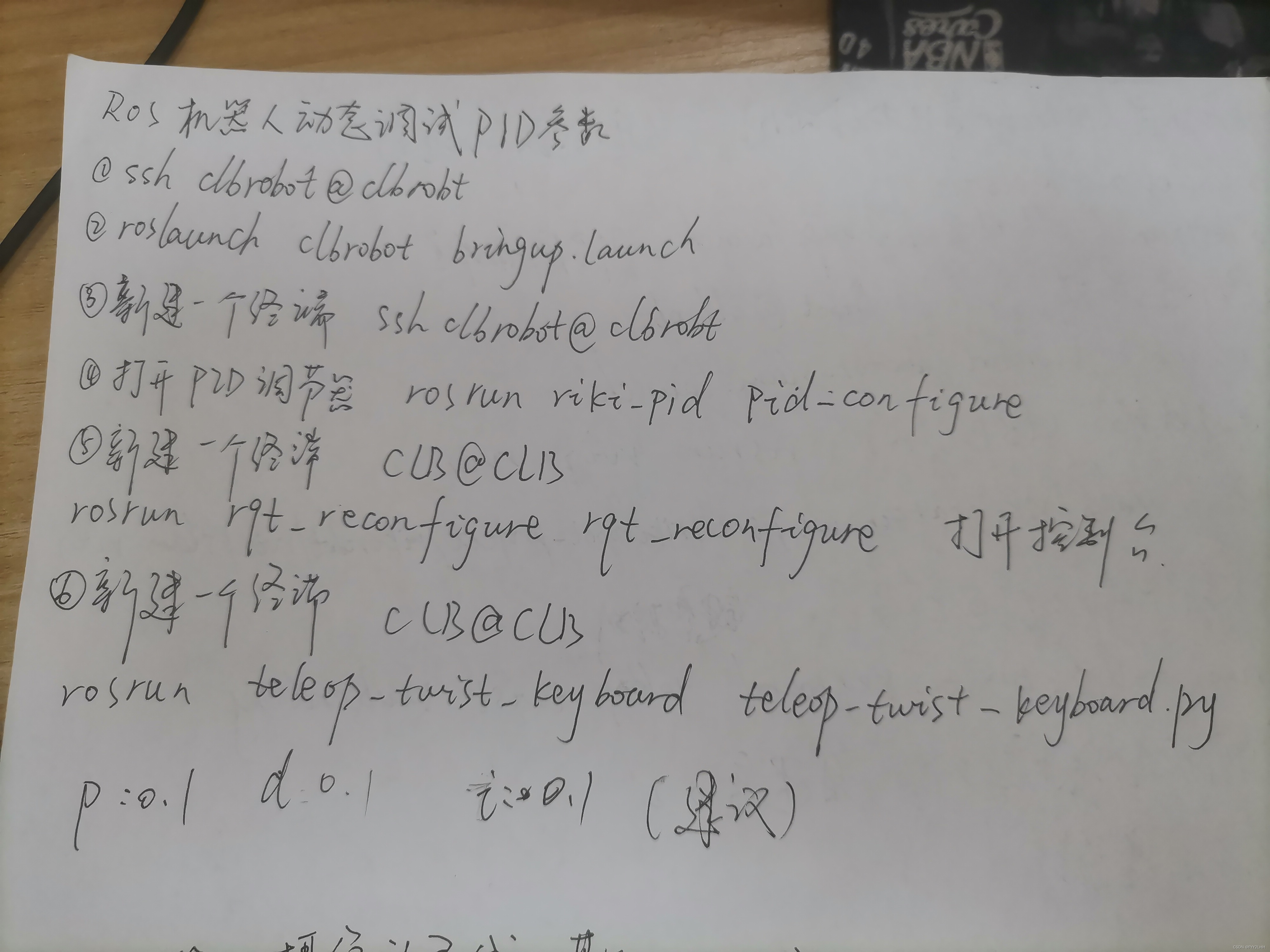
1、打开终端,连接树莓派
ssh clbrobot@clbrobt
2、打开底盘节点
roslaunch clbrobot bringup.launch
3、再打开一个终端
ssh clbrobot@clbrobt
4、打开PID调节器
rosrun riki_pid pid_configure
5、虚拟机终端打开,打开一个新终端(CLB@CLB),打开控制台
rosrun rqt_reconfigure rqt_reconfigure
6、新建一个终端(CLB@CLB)
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
建议 P:0.1 I:0.1 D:0.1
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)