文章目录
- 一、进程的定义
- 二、进程的特征
- 三、进程的组成及其作用
- 四、进程控制块
- 4.1 进程控制块定义
- 4.2 task_struct的内容
- 五、进程与程序的区别
- 六、进程与线程的区别
- 七、进程的种类
- 八、PID
-
- 九、进程的相关命令
- 9.1 ps命令
- 9.2 top/htop命令
- 9.3 pidof命令
- 9.4 kill命令
- 十、进程的状态
- 十一、进程状态切换的实例(前后台切换)
- 十二、进程的创建
- 12.1 进程的创建过程(fork)
- 12.2 使用fork创建进程(不关注返回值)
- 12.3 使用fork创建进程(关注返回值)
- 12.4 进程的执行过程
- 12.5 父子进程内存空间的问题
一、进程的定义
进程(Process)是计算机中的程序关于某数据集合上的一次运行活动,是系统进行资源分配的基本单位,是操作系统结构的基础。
简而言之就是程序的一次执行过程。
进程是正在运行的程序的实例,也就是一个正在执行的任务。
进程是有生命周期的,随着程序的运行而创建,随着程序的结束而终止。
进程是分配资源的最小单位,只要创建了一个进程,就分配了[0-3G]的用户空间。
只要用户执行了一个程序,内核就会创建一个task_struct(PCB)结构体,这个结构体就代表当前的进程。
在进程内部维护了自己的一套文件描述符和缓冲区。只要进程执行结束,那么它的所有的资源都会被操作系统回收。
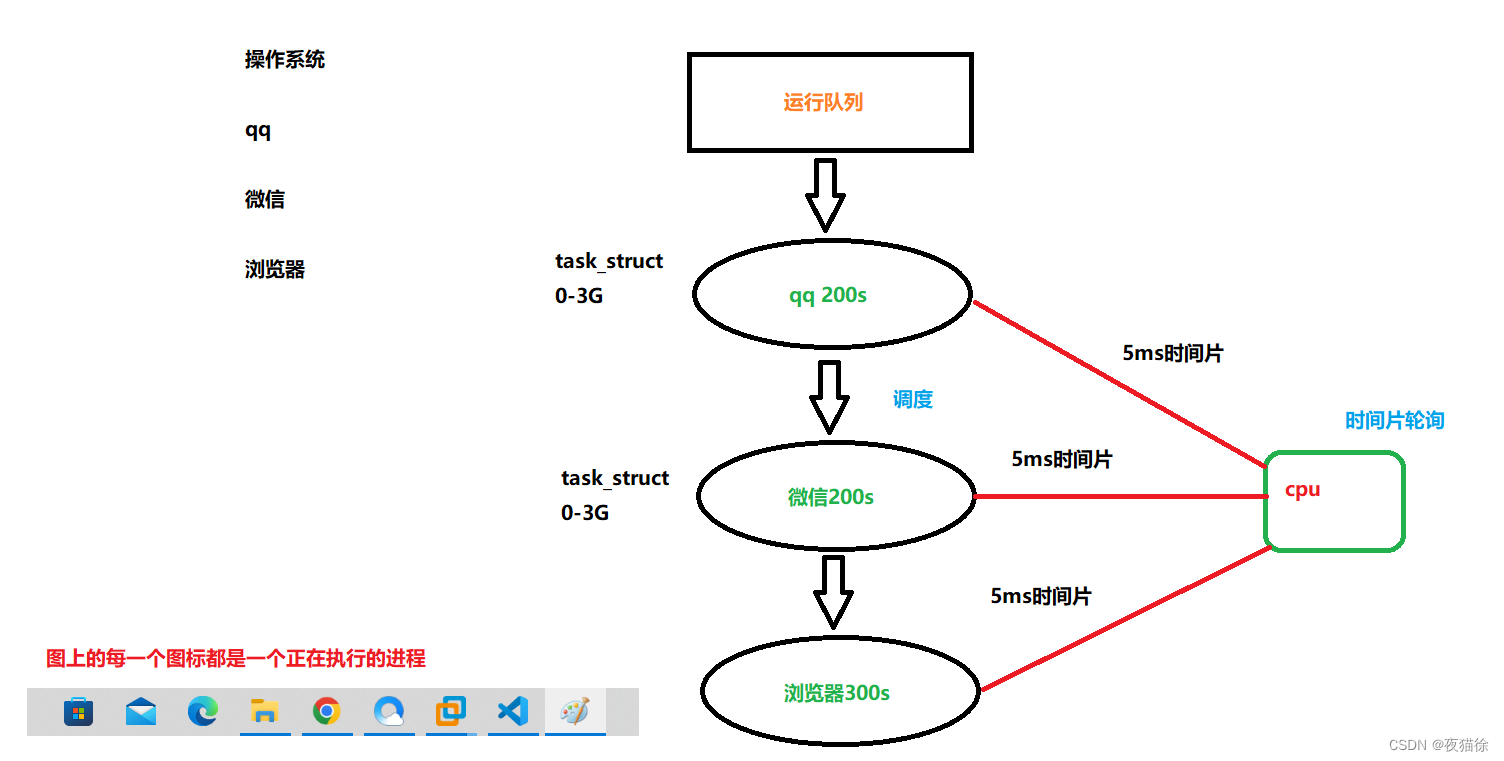
时间片轮询实现并发
二、进程的特征
- 动态性:进程的实质是程序在多道程序系统中的一次执行过程,进程是动态产生,动态消亡的。
- 并发性:任何进程都可以同其他进程一起并发执行
- 独立性:进程是一个能独立运行的基本单位,同时也是系统分配资源和调度的独立单位;
- 异步性:由于进程间的相互制约,使进程具有执行的间断性,即进程按各自独立的、不可预知的速度向前推进
多个不同的进程可以包含相同的程序:一个程序在不同的数据集里就构成不同的进程,能得到不同的结果;但是执行过程中,程序不能发生改变。
三、进程的组成及其作用
进程的组成包含三个部分:进程控制块PCB(task_struct),数据段,程序段。
进程控制块:使一个在多道程序环境下不能独立运行的程序(包含数据),成为一个能独立运行的基本单位,一个能与其它进程并发执行的进程。
程序段:是进程中能被进程调度程序在CPU上执行的程序代码段。
数据段:一个进程的数据段,可以是进程对应的程序加工处理的原始数据,也可以是程序执行后产生的中间或最终数据。
四、进程控制块
4.1 进程控制块定义
为了描述控制进程的运行,系统中存放进程的管理和控制信息的数据结构称为进程控制块(PCB Process Control Block),它是进程实体的一部分,是操作系统中最重要的记录性数据结构。它是进程管理和控制的最重要的数据结构,每一个进程均有一个PCB,在创建进程时,建立PCB,伴随进程运行的全过程,直到进程撤消而撤消。
PCB的本质是一个结构体,不同的操作系统中PCB的名字不同。Linux中,PCB名为task_struct,PCB 是控制进程的唯一手段。
每一个进程都有一个进程描述符,这个”进程描述符”即是task_struct,在task_struct里面保存了许多关于进程控制的信息。
4.2 task_struct的内容
每个进程都把它的信息放在task_struct这个数据结构里面,而task_struct包含以下内容:
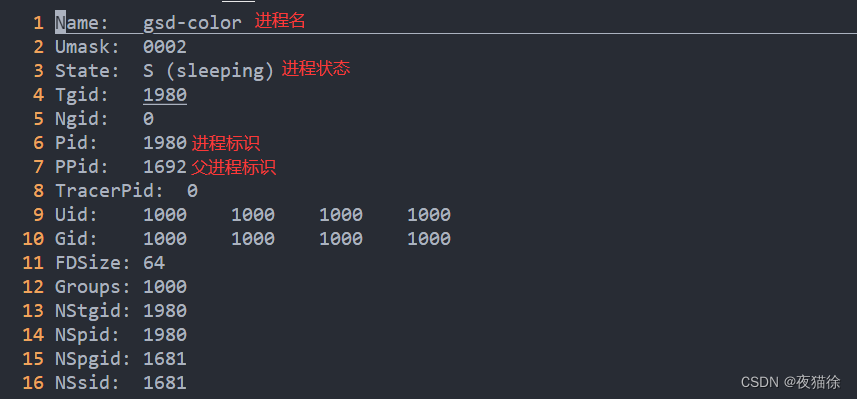
- 标示符(pid):描述本进程的唯一标示符,用来区别其他进程。
- 状态:任务状态,退出代码,退出信号等。
- 优先级:相对于其他进程的优先级(数越小,优先级越高)。
- 程序计数器:程序中即将被执行的下一条指令的地址。
- 内存指针:包括程序代码和进程相关数据的指针,还有和其他进程共享的内存块的指针。
- 上下文数据:保存上下文就是把cpu寄存器中的值保存到内存中;恢复上下文就是把内存中的寄存器值恢复到cpu中去;
- I/O状态信息:包括显示的I/O请求,分配给进程的I/O设备和正在被进程使用的文件列表。
- 记账信息 :可能包括处理器时间总和,使用的时钟数总和,时间限制,记账号等。
- 其他信息
五、进程与程序的区别
- 进程是程序的一次执行过程,它是动态的,具备生命周期,在内存上存放。
- 程序是静态的,没有生命周期。在磁盘上存放,程序就是可以可执行文件。
- 进程更能真实地描述并发,而程序不能。
- 进程具有创建其他进程的功能,而程序没有。
- 同一程序可以对应多个进程。
六、进程与线程的区别
通常在一个进程中可以包含若干个线程,它们可以利用进程所拥有的资源,在引入线程的操作系统中,通常都是把进程作为分配资源的基本单位,而把线程作为独立运行和独立调度的基本单位,由于线程比进程更小,基本上不拥有系统资源,故对它的调度所付出的开销就会小得多,能更高效的提高系统内多个程序间并发执行的程度。
七、进程的种类
进程的种类有三种分别是交互进程,批处理进程,守护进程
- 交互进程:交互进程是由shell维护的,通过shell和用户进行交互。
例如文本编辑器就是交互进程。 - 批处理进程:批处理进程会被放到内核的一个队列中,随着队列的运行而运行,它的优先级相对比较低。
例如gcc编译程序的过程。 - 守护进程:守护进程是后台运行的进程,随着系统的启动而启动,随着系统的终止而终止。
例如windows上的各种服务。
八、PID
8.1 PID定义
PID是进程的唯一标识(进程号),它是一个大于等于0的整数。
在一个系统中能够创建的最大的进程可以通过如下命令查看。
cat /proc/sys/kernel/pid_max
通过命令可知能够创建的最大的进程是131072。

在操作系统上正在运行的进程都在proc目录下
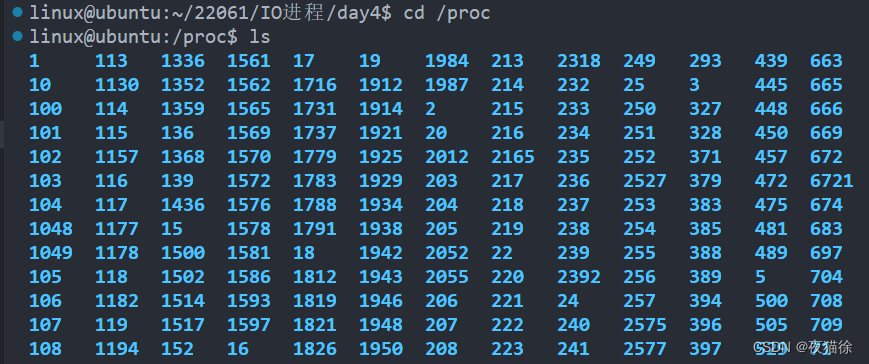
执行命令
cd 1980
vi status
8.2 特殊PID的进程
0(idle):在操作系统启动的时候创建的进程,0号进程是1和2号进程的父进程。如果在操作系统上没有其他的进程执行就执行0号进程。
1(init):1号进程是在0号进程通过kernel_thread函数创建的来的,它就要是用来
在启动的时候初始化各种硬件,应硬件初始化完之后。init进程用来为孤儿进程回收资源。
2(kthreadd):2号进程也是在0号进程通过kernel_thread函数创建的来的,这个进程是调度器进程。
九、进程的相关命令
9.1 ps命令
ps -ef命令:查看进程的父子关系
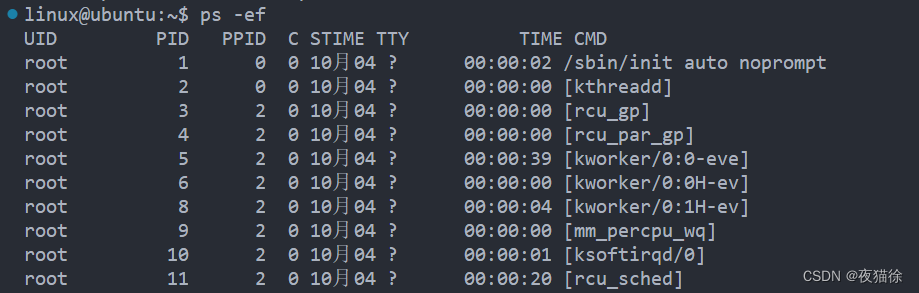
UID:用户名
PID:进程号
PPID:父进程号
TTY:是否有终端与之关联,如果没有就是?
ps -ajx命令:查看进程状态的命令(静态)。可以完全替代ps -ef
ps -ajx | grep bash指定搜索bash进程
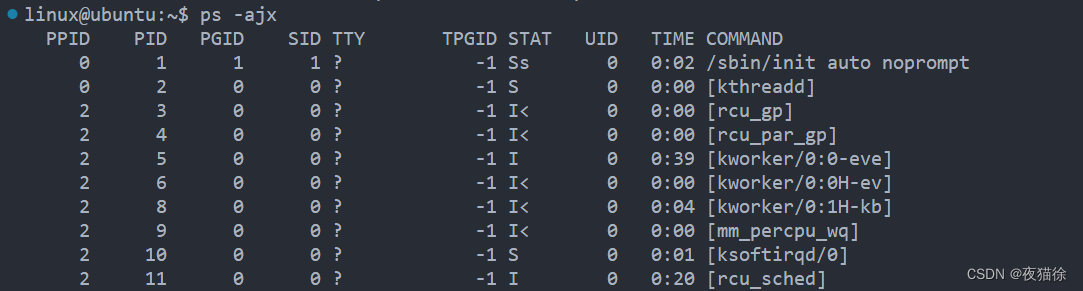
PPID:父进程号
PID:进程号
SID:只要新开一个终端就会创建一个会话(SID)
PGID:一个会话内有一个前台进程组和多个后台进程组(PGID),进程组内有多个进程
TTY:是否有终端与之关联,如果没有就是?
TPGID:如果是-1就代表是守护进程
STAT:进程的状态
UID:用户名
TIME:运行的时间
COMMAND:进程名
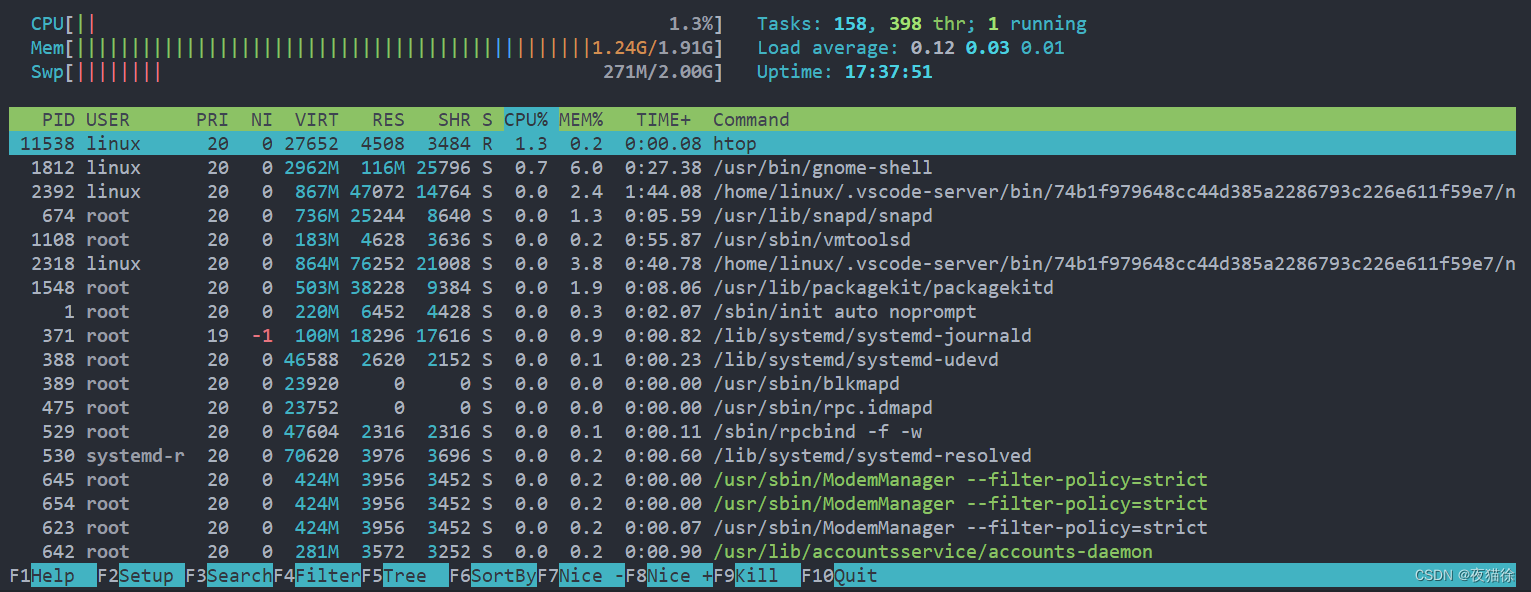
9.2 top/htop命令
动态查看进程状态的命令
top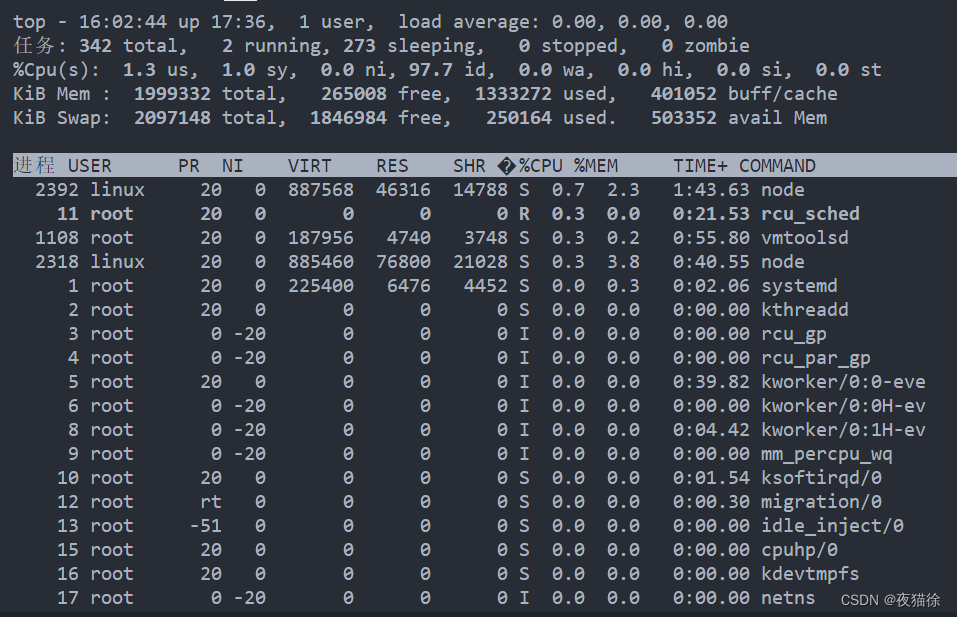
htop
9.3 pidof命令
pidof a.out:查看所有名叫a.out的进程进程号
等价于ps -ajx | grep a.out

9.4 kill命令
给进程发信号
kill -l:查看操作系统中的信号
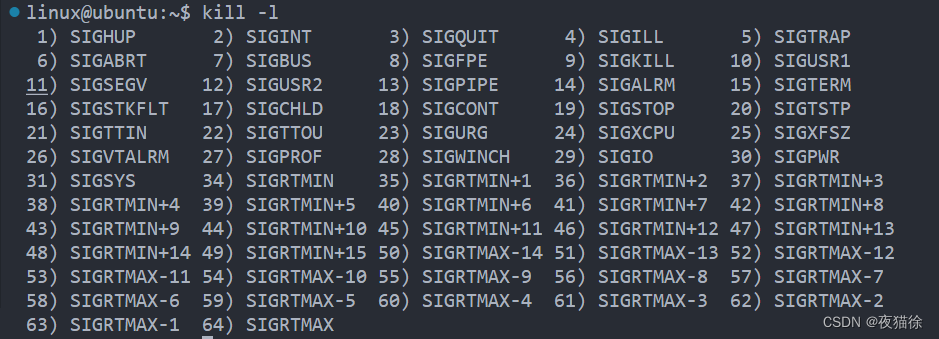
kill -信号号 pid 命令:给系统发信号
kill -2 pid:ctrl+c 结束pid对应的程序
kill -9 pid:杀死pid对应的程序
kill -19 pid:停止pid对应的程序
kill -18 pid:pid对应的进程继续运行
killall 程序名:杀死程序名的进程
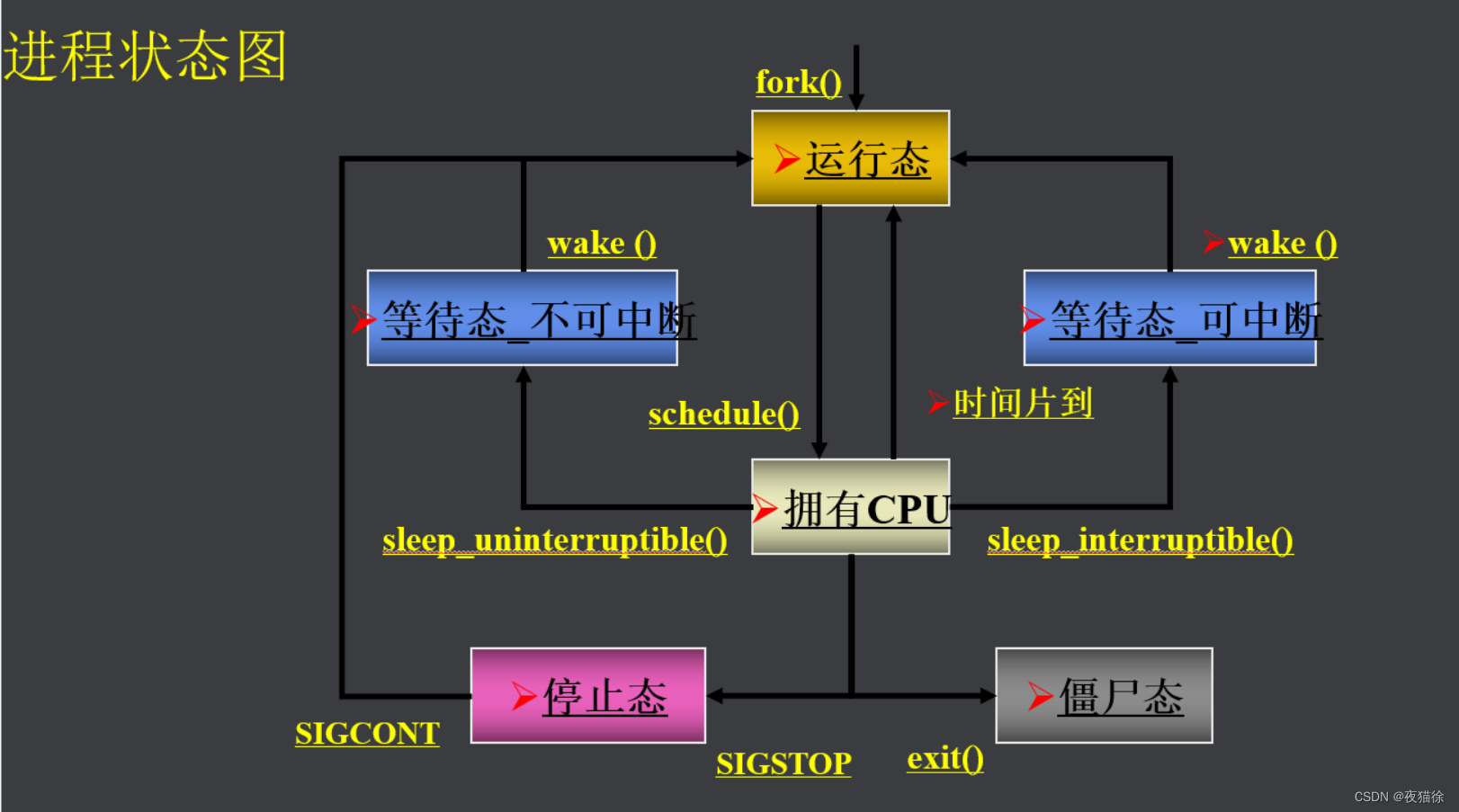
十、进程的状态
执行命令man ps
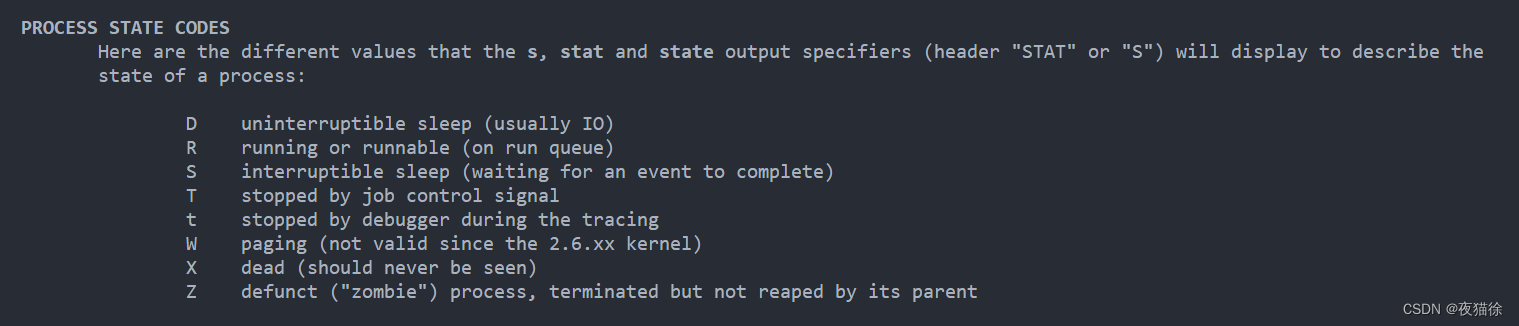
1.进程的状态
D 不可中断的等待态(信号)
R 运行态
S 可中断的等待态 (信号)
T 停止态
X 死亡态
Z 僵尸态
2.进程的附加状态
< 高优先级的进程
N 低优先级的进程
L 内存锁定
s 会话组的组长
l 进程内包含多线程
+ 前台进程
3.特殊状态的进程
孤儿进程:父进程死了之后,子进程就变成了孤儿进程。
僵尸进程:子进程死掉之后,父进程没有为他收尸,此时子进程就是僵尸进程。
十一、进程状态切换的实例(前后台切换)
#include <stdio.h>
int main(int argc,const char * argv[])
{
while(1);
return 0;
}
执行上面程序使进程保持运行态。
可以看见状态R+,进程前台运行

ctrl+z相当于kill -19 13690

变成停止态T

方式1:kill -18 13690使停止态变成后台运行的状态R

kill -9 13690杀死程序

方式2: 从停止态变为后台运行的状态 (直接后台运行 ./a.out &)
通过前两步使其变成停止态
通过jobs -l查看所有停止状态的进程
[1]这个1是作业号
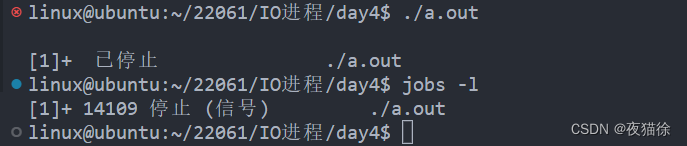
bg 作业号(1是作业号):使进程变为后台运行

fg 作业号(1是作业号):使进程变为前台运行的进程


方式3: 在执行程序的时候使用./a.out &使进程后台运行状态

注: 后台进程可以向输出信息,但是不要向后台进程输入信息
十二、进程的创建
12.1 进程的创建过程(fork)
进程是通过拷贝父进程得到的。
#include <sys/types.h>
#include <unistd.h>
pid_t fork(void);
功能:创建进程
参数:
@无
返回值:如果成功,子进程的PID会返回给父进程,子进程收到0。
失败时,父进程中返回-1,不创建子进程,并置为错误码。
12.2 使用fork创建进程(不关注返回值)
fork一次
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main(int argc,const char * argv[])
{
fork();
while(1);
return 0;
}
循环fork三次
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main(int argc,const char * argv[])
{
for(int i=0;i<3;i++)
{
fork();
}
while(1);
return 0;
}
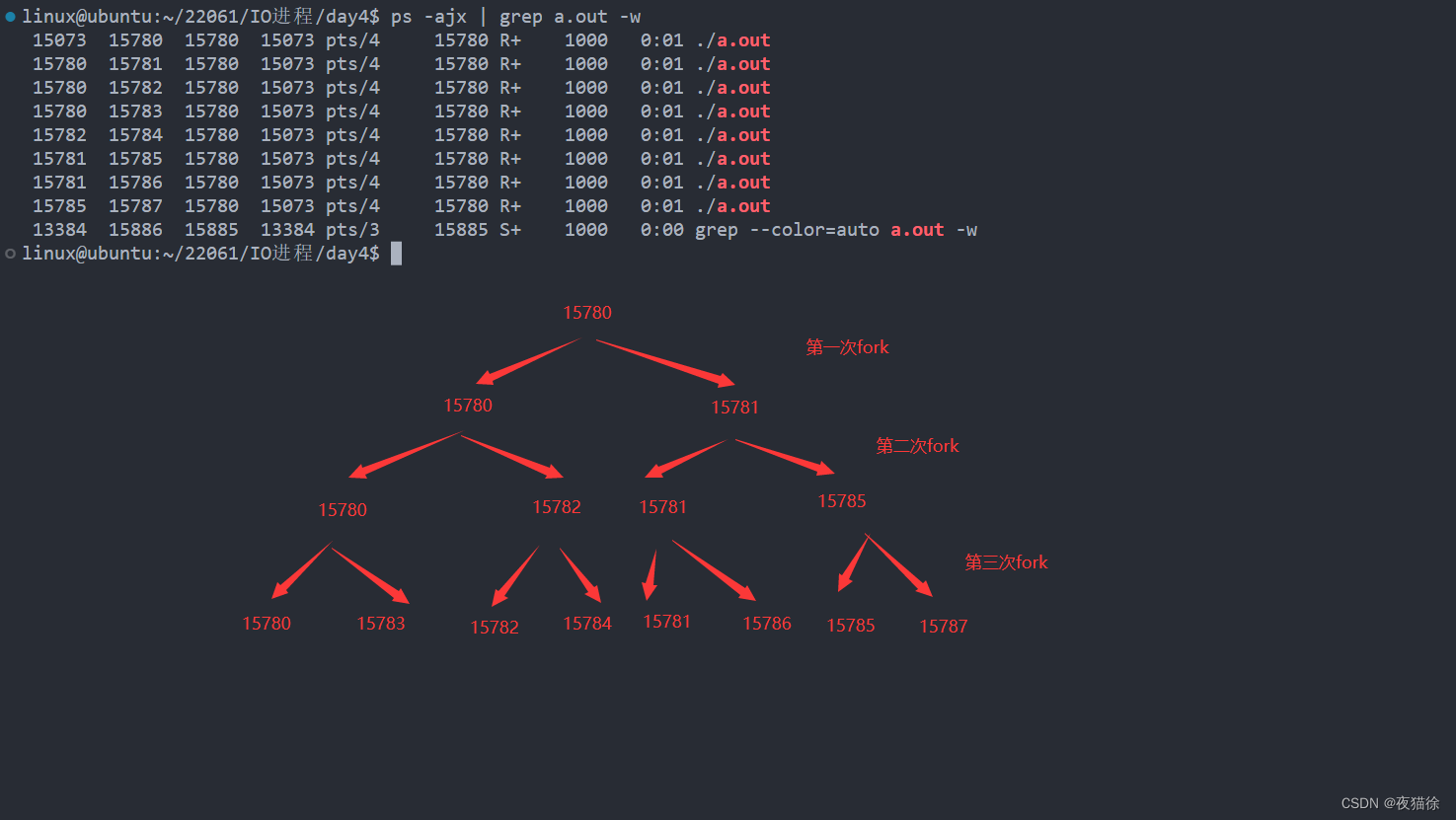
如果在不关注返回值的情况下,fork n次产生2n个进程
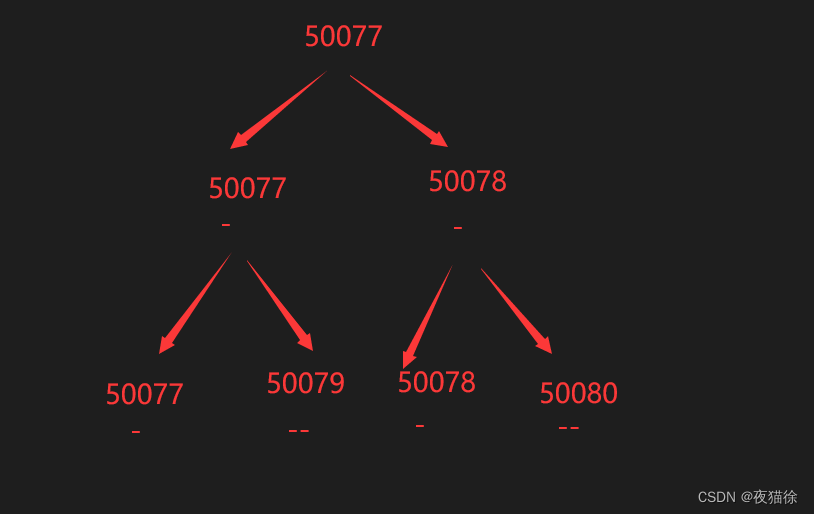
fork子进程的时候会拷贝父进程的缓冲区,多个进程共用一个终端
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main(int argc,const char * argv[])
{
for(int i=0;i<2;i++)
{
fork();
printf("-");
}
return 0;
}

结果分析:
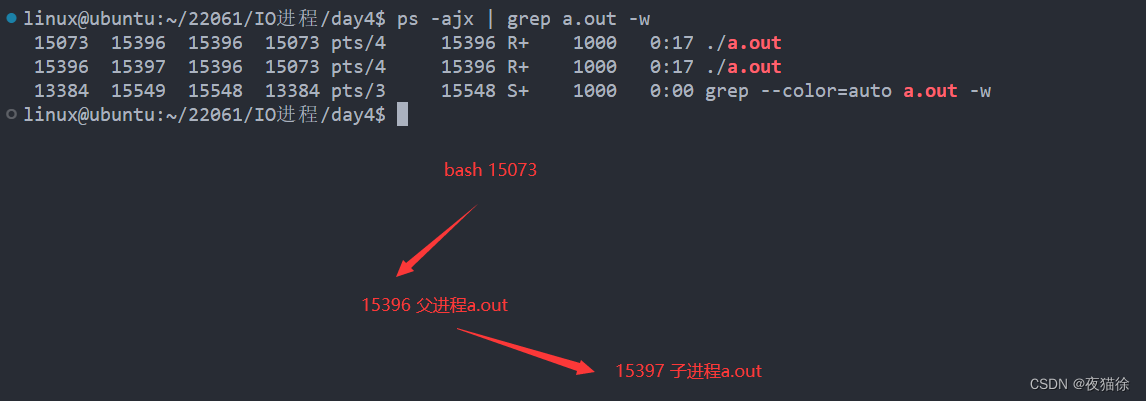
12.3 使用fork创建进程(关注返回值)
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main(int argc,const char * argv[])
{
pid_t pid;
pid = fork();
if(pid == -1){
PRINT_ERR("fork error");
}else if(pid == 0){
printf("这是子进程\n");
}else{
printf("这是父进程\n");
}
return 0;
}
12.4 进程的执行过程
进程的执行没有先后顺序,时间片轮询,上下文切换。
12.5 父子进程内存空间的问题
父子进程内存空间是独立的,子进程拷贝父进程的时候遵从写时拷贝。
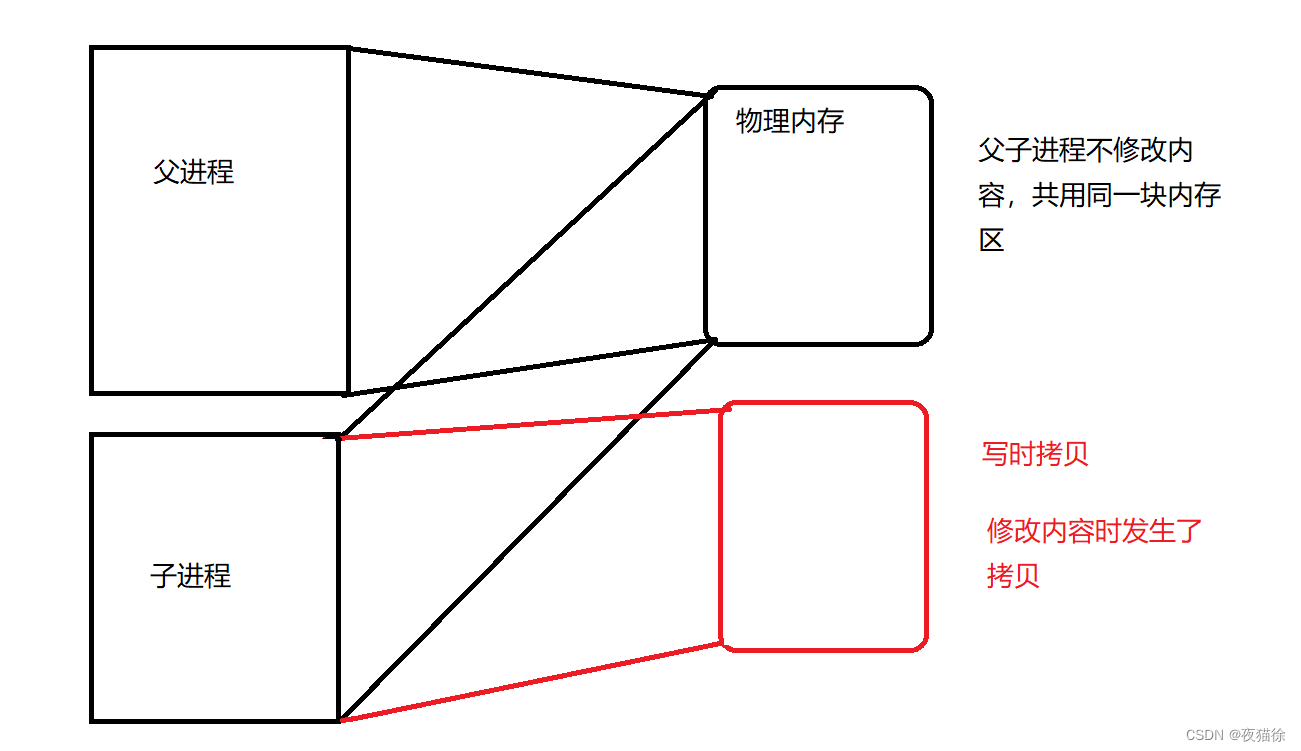
哪份被修改了拷贝哪份的,不修改共用一块内存。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)