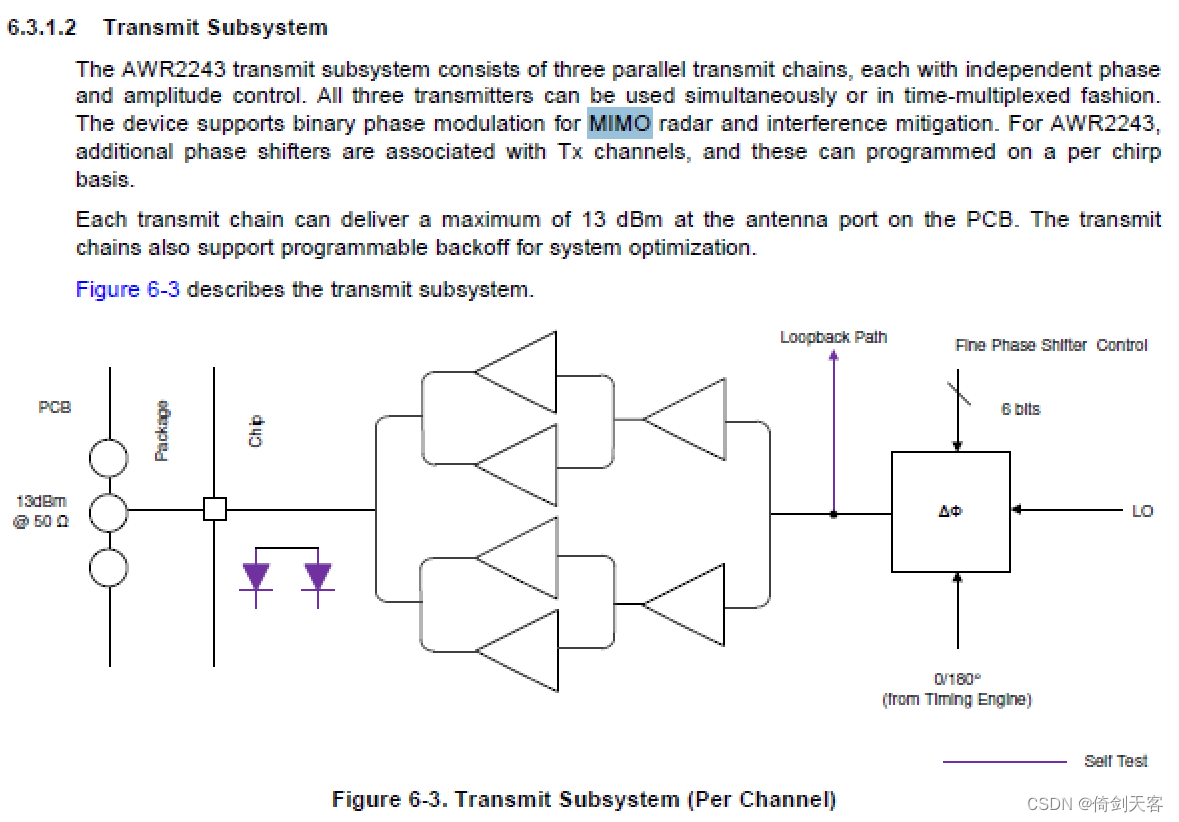
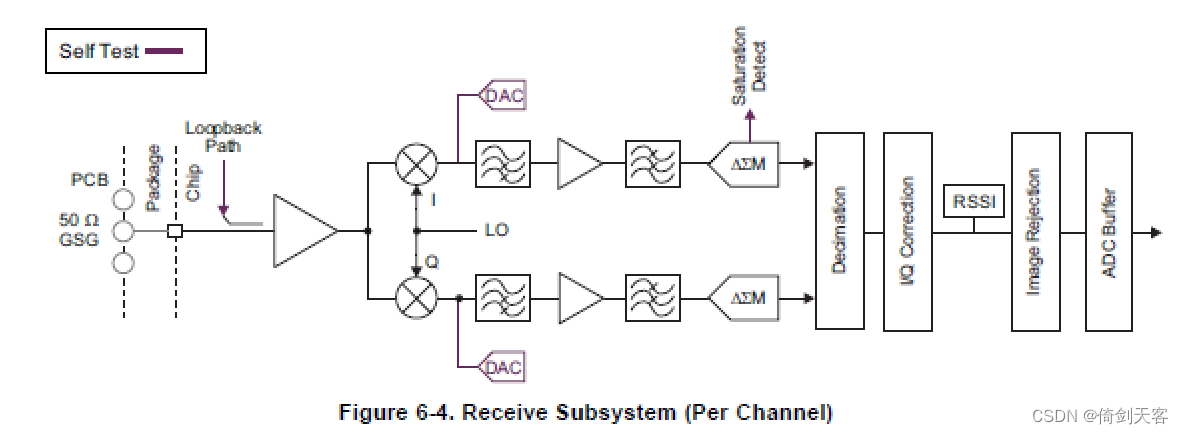
awr 2243为三发四收, 支持时分多路复用(TDM)MIMO模式,以及三个发射天线同时工作的BPM-MIMO模式(二进制调制相位调制),对于AWR2243,发射天线与移相器相连,从而可以实现对每个chirp的相位调制。 这里补充一下,AWR2243支持复数采样,即接收机部分采用正交混频器和双路IF和ADC链路获取 I 路、Q路采样。接收机如下图所示:
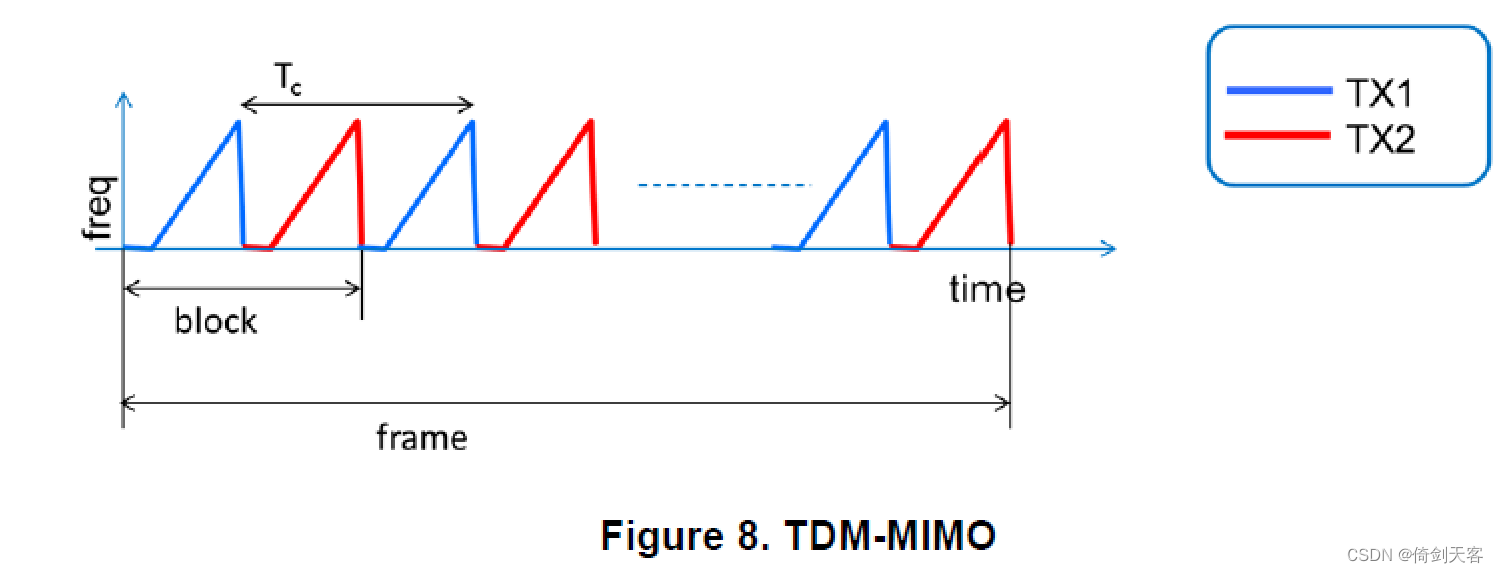
TDM-MIMO模式是最简单和常用的MIMO工作模式,在TDM模式下,不同发射天线依次发射信号(不能同时工作),某一天线的发射信号可被多个接收天线接收。 下图以两个发射天线为例给出了TDM-MIMO模式下两个天线发射信号的关系。
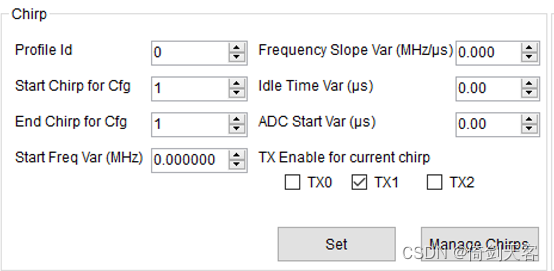
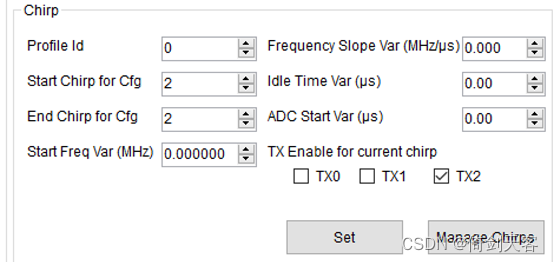
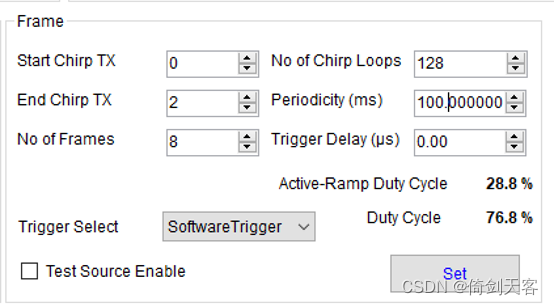
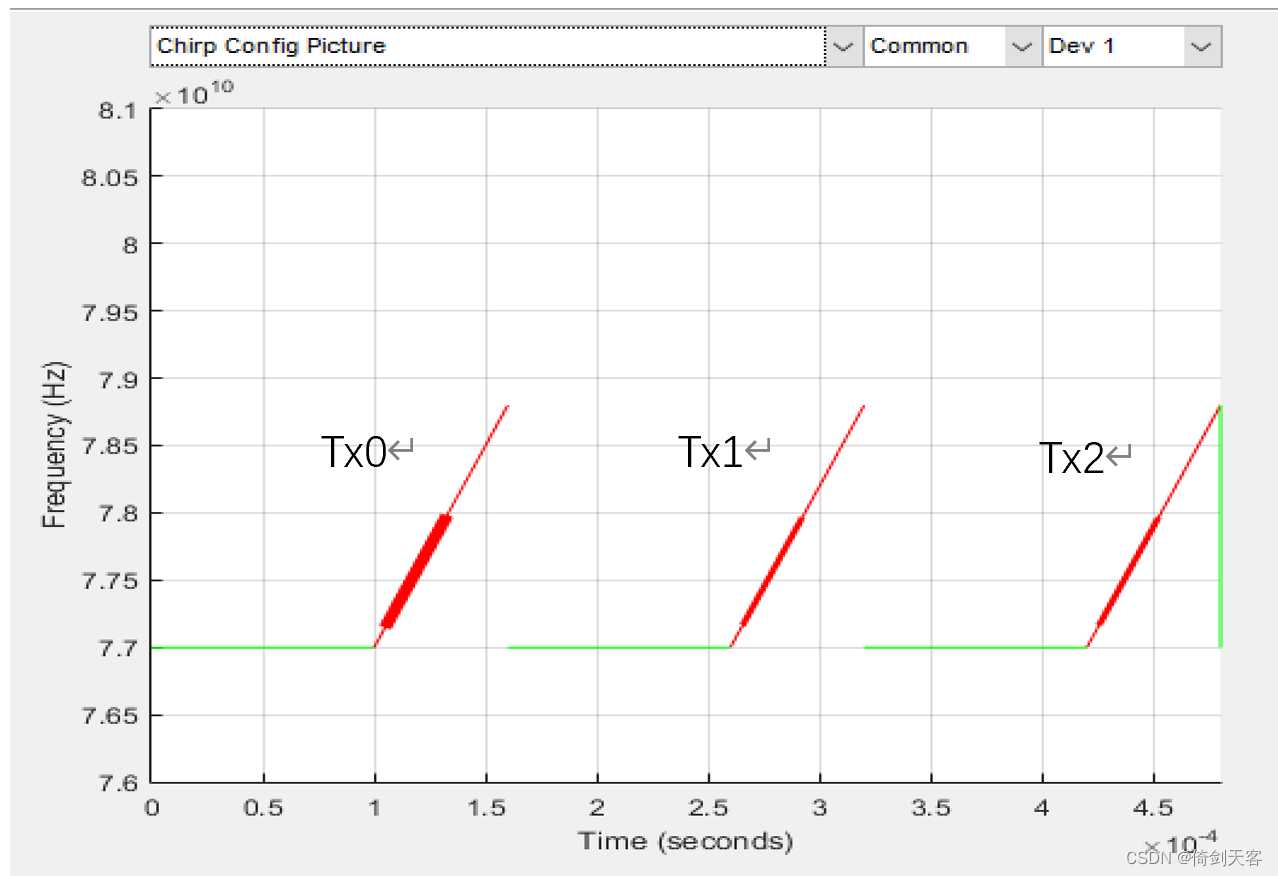
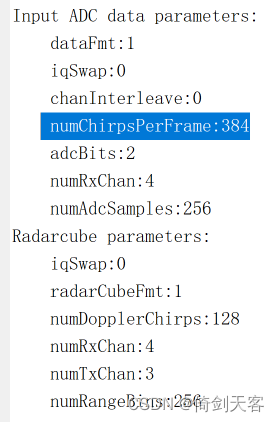
对于AWR2243,用mmWave Studio 进行TDM模式设置方法如下图所示: (1)天线1: (2)天线2: (3)天线3: (4)frame设置 设置后波形如下: 数据大小如下: 其中: 384 = 128*3个通道
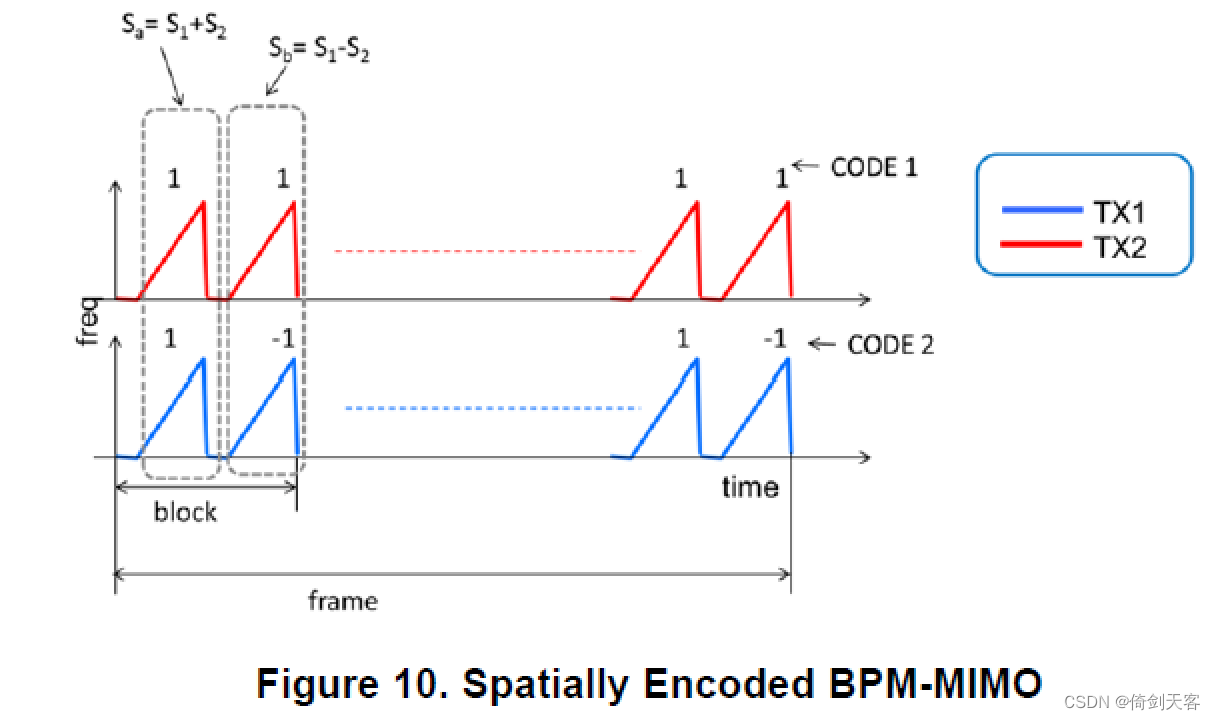
BPM 模式允许多个发射天线同时发射信号,不同发射天线通过相位编码进行区分(正交)。不同发射天线的相位可以设置为0°或180°,分别对应原chirp乘以1或-1。 以两个发射天线为例,BPM-MIMO模式下的信号发射形式如下图所示,其中TX1的编码为[1 1],TX2的编码为[1 -1]。假设TX1发射信号为s1,TX2发射信号为s2,第一个chirp周期内接收天线的接收信号为sa,第二个chirp周期内接收天线的接收信号为sb,则sa=s1+s2,sb=s1-s2;因此可以反演出,s1=(sa+sb)/2,s2=(sa-sb)/2。