目录
1.前言
2.互斥锁
2.1 互斥锁的特点
2.2 互斥锁的使用
2.2 std::lock_guard
3.死锁
3.1 死锁的含义
3.2 死锁的例子
3.3 死锁的解决方法
1.前言
比如说我们现在以一个list容器来模仿一个消息队列,当消息来临时插入list的尾部,当读取消息时就把头部的消息读出来并且删除这条消息。在代码中就以两个线程分别实现消息写入和消息读取的功能,如下:
class msgList
{
private:
list<int>mylist; //用list模仿一个消息队列
public:
void WriteList() //向消息队列中写入消息(以i作为消息)
{
for (int i = 0; i<100000; i++)
{
cout << "Write : " << i <<endl;
mylist.push_back(i);
}
return;
}
void ReadList() //从消息队列中读取并取出消息
{
for(int i=0;i<100000;i++)
{
if (!mylist.empty())
{
cout << "Read : " << mylist.front() << endl;
mylist.pop_front();
}
else
{
cout << "Message List is empty!" << endl;
}
}
}
};
int main()
{
msgList mlist;
thread pread(&msgList::ReadList, &mlist); //读线程
thread pwrite(&msgList::WriteList, &mlist); //写线程
//等待线程结束
pread.join();
pwrite.join();
return 0;
}
这段程序在运行过程中,大部分时间是正常的,但是也会出现如下不稳定的情况:

为什么会出现这种情况呢?
这是因为消息队列对于读线程和写线程来说是共享的,这时就会出现两种特殊的情况:读线程的读取操作还没有结束,线程上下文就切换到了写线程中;或者写线程的写入操作还没有结束,线程上下文切换就到了读线程中,这两种情况都反映了读写冲突,从而出现了以上错误。
要想解决这个问题,最显然最直接的方法就是将读写操作分离开来,读的时候不允许写,写的时候不允许读,这样,才能实现线程安全的读和写。说形象一点,就是在进行读操作时,就对共享资源进行加锁,禁止其他线程访问,其他线程要访问就得等到读线程解锁才行,就像上厕所一样,一次只能上一个人,其他人必须得等他上完了再上。这样,就有了互斥锁的概念。
2.互斥锁
在多任务操作系统中,同时运行的多个任务可能都需要使用同一种资源。比如说,同一个文件,可能一个线程会对其进行写操作,而另一个线程需要对这个文件进行读操作,可想而知,如果写线程还没有写结束,而此时读线程开始了,或者读线程还没有读结束而写线程开始了,那么最终的结果显然会是混乱的。为了保护共享资源,在线程里也有这么一把锁——互斥锁(mutex),互斥锁是一种简单的加锁的方法来控制对共享资源的访问,互斥锁只有两种状态,即上锁( lock )和解锁( unlock )。
2.1 互斥锁的特点
1. 原子性:把一个互斥量锁定为一个原子操作,这意味着如果一个线程锁定了一个互斥量,没有其他线程在同一时间可以成功锁定这个互斥量;
2. 唯一性:如果一个线程锁定了一个互斥量,在它解除锁定之前,没有其他线程可以锁定这个互斥量;
3. 非繁忙等待:如果一个线程已经锁定了一个互斥量,第二个线程又试图去锁定这个互斥量,则第二个线程将被挂起(不占用任何cpu资源),直到第一个线程解除对这个互斥量的锁定为止,第二个线程则被唤醒并继续执行,同时锁定这个互斥量。
2.2 互斥锁的使用
根据前面我们可以知道,互斥锁主要就是用来保护共享资源的,在C++ 11中,互斥锁封装在mutex类中,通过调用类成员函数lock()和unlock()来实现加锁和解锁。值得注意的是,加锁和解锁,必须成对使用,这也是比较好理解的。除此之外,互斥量的使用时机,就以开篇程序为例,我们要保护的共享资源当然就是消息队列list了,那么互斥锁应该加在哪里呢?
可能想的比较简单一点:就直接把锁加在函数最前面不就好了么?如下所示:
class msgList
{
private:
list<int>mylist; //用list模仿一个消息队列
mutex mtx; //创建互斥锁对象
public:
void WriteList() //向消息队列中写入消息(以i作为消息)
{
mtx.lock();
for (int i = 0; i<100000; i++)
{
cout << "Write : " << i <<endl;
mylist.push_back(i);
}
mtx.unlock();
return;
}
//.......
};
不过如果这样加锁的话,要等写线程完全执行结束才能开始读线程,读写线程变成了串行执行,这就违背了线程并发性的特点了。正确的加锁方式应当是在执行写操作的具体部分加锁,如下所示:
class msgList
{
private:
list<int>mylist; //用list模仿一个消息队列
mutex mtx; //创建互斥锁对象
public:
void WriteList() //向消息队列中写入消息(以i作为消息)
{
for (int i = 0; i<100000; i++)
{
mtx.lock();
cout << "Write : " << i <<endl;
mylist.push_back(i);
mtx.unlock();
}
return;
}
//.......
};
这样,才能真正的实现读写互不干扰。
下面再举一个更为直观的例子,创建两个线程同时对list进行写操作:
class msgList
{
private:
list<int>mylist;
mutex m;
int i = 0;
public:
void WriteList()
{
while(i<1000)
{
mylist.push_back(i++);
}
return;
}
void showList()
{
for (auto p = mylist.begin(); p != mylist.end(); p++)
{
cout << (*p) << " ";
}
cout << endl;
cout << "size of list : " << mylist.size() << endl;
return;
}
};
int main()
{
msgList mlist;
thread pwrite0(&msgList::WriteList, &mlist);
thread pwrite1(&msgList::WriteList, &mlist);
pwrite0.join();
pwrite1.join();
cout << "threads end!" << endl;
mlist.showList(); //子线程结束后主线程打印list
return 0;
}
这里用两个线程来写list,并且最终在主线程中调用了showList()来输出list的size和所有元素,我们先来看下输出情况:

根据结果可以看到,这里有很多问题:实际输出的元素个数和size不符,输出的元素也并不是连续的,这都是多个线程同时更新list所造成的情况。这种情况下,运行结果是无法预料的,每次都可能不一样。这就是线程不安全所引发的问题,我们加上锁再来看看:
class msgList
{
private:
list<int>mylist;
mutex m;
int i = 0;
public:
void WriteList()
{
while(i<1000)
{
m.lock();//加锁
mylist.push_back(i++);
m.unlock(); //解锁
}
return;
}
// ......
};

这样加锁就正确了吗?我们再多运行几次看看:

数字都是连续的,但是个数却多了一个(出现的几率还是比较小),这又是什么原因造成的呢?还是两个线程的问题,假设要插入1000个数,循环条件就是while(i<1000),当i=999的时候两个写线程都可以进入while循环,此时如果pwrite0线程拿到了lock(),那么pwrite1线程就只能一直等待,pwrite0线程继续往下执行,使得i变成了1000,此时,对于pwrite0线程来说,它就必须退出循环了。而此时的pwrite1在哪里呢?还等在lock()的地方,pwrite0线程unlock()后,pwrite1成功lock(),此时i=1000,但是pwrite1却还没有执行完此次循环,因此向list中插入1000,此时退出的i的值为1001,这也就造成了实际输出为1001个数的情况。
为了避免这个问题,一个简单的办法就是在lock()之后再加上一个判断,判断i是否依旧满足while的条件,如下:
void WriteList()
{
while(i<10000)
{
m.lock();
if (i >= 10000)
{
m.unlock(); //退出之前必须先解锁
break;
}
mylist.push_back(i++);
m.unlock();
}
return;
}
为什么这里要在break前面加一个unlock()呢?原因就在于:如果break前面没有unlock(),一旦i符合了if的条件,就直接break了,此时就没法unlock(),程序就会报错:

可以发现,这种错误是比较难发现的,特别是像这样程序中出现了分支的情况,很容易就使得程序实际运行时lock()了却没有unclock()。为了解决这一问题,就有了std::lock_guard。
2.2 std::lock_guard
简单来理解的话,lock_guard就是一个类,它会在其构造函数中加锁,而在析构函数中解锁,也就是说,只要创建一个lock_guard的对象,就相当于lock()了,而该对象析构时,就自动调用unlock()了。
就以上述程序为例,直接改写为:
void WriteList()
{
while(i<10000)
{
lock_guard<mutex> guard(m); //创建lock_guard的类对象guard,用互斥量m来构造
//m.lock();
if (i >= 10000)
{
//m.unlock(); //由于有了guard,这里就无需unlock()了
break;
}
mylist.push_back(i++);
//m.unlock();
}
return;
}
这里主要有两个需要注意的地方:第一、原先的lock()和unlock()都不用了;第二、if中的break前面也不用再调用unlock()了。这都是因为对象guard在lock_guard一句处构造出来,同时就调用了lock(),当退出while时,guard析构,析构时就调用了unlock()。(局部对象的生命周期就是创建该对象时离其最近的大括号的范围{})
3.死锁
3.1 死锁的含义
死锁是什么意思呢?举个例子,我和你手里都拽着对方家门的钥匙,我说:“你不把我的锁还来,我就不把你的锁给你!”,你一听不乐意了,也说:“你不把我的锁还来,我也不把你的锁给你!”就这样,我们两个人互相拿着对方的锁又等着对方先把锁拿来,然后就只能一直等着等着等着......最终谁也拿不到自己的锁,这就是死锁。
显然,死锁是发生在至少两个锁之间的,也就是指由于两个或者多个线程互相持有对方所需要的资源,导致这些线程处于等待状态,无法前往执行,当线程互相持有对方所需要的资源时,会互相等待对方释放资源,如果线程都不主动释放所占有的资源,将产生死锁。
3.2 死锁的例子
mutex m0,m1;
int i = 0;
void fun0()
{
while (i < 100)
{
lock_guard<mutex> g0(m0); //线程0加锁0
lock_guard<mutex> g1(m1); //线程0加锁1
cout << "thread 0 running..." << endl;
}
return;
}
void fun1()
{
while (i < 100)
{
lock_guard<mutex> g1(m1); //线程1加锁1
lock_guard<mutex> g0(m0); //线程1加锁0
cout << "thread 1 running... "<< i << endl;
}
return;
}
int main()
{
thread p0(fun0);
thread p1(fun1);
p0.join();
p1.join();
return 0;
}
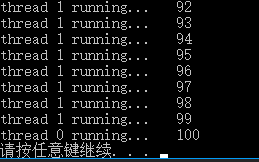
我们来看下运行结果:

这就出现了死锁。产生的原因就是因为在线程0中,先加锁0,再加锁1;在线程1中,先加锁1,再加锁0;如果两个线程之一能够完整执行的话,那自然是没有问题的,但是如果某个时刻,线程0中刚加锁0,就上下文切换到线程1,此时线程1就加锁1,然后此时两个线程都想向下执行的话,线程1就必须等待线程0解锁0,线程0就必须等待线程1解锁1,就这样两个线程都一直阻塞着,形成了死锁。
3.3 死锁的解决方法
①按顺序加锁
以上述例程来说,就是线程0和线程1的加锁顺序保持一致,如下所示:
mutex m0,m1;
int i = 0;
void fun0()
{
while (i < 100)
{
lock_guard<mutex> g0(m0); //线程0加锁0
lock_guard<mutex> g1(m1); //线程0加锁1
cout << "thread 0 running..." << endl;
}
return;
}
void fun1()
{
while (i < 100)
{
lock_guard<mutex> g0(m0); //线程1加锁0
lock_guard<mutex> g1(m1); //线程1加锁1
cout << "thread 1 running... "<< i << endl;
}
return;
}
int main()
{
thread p0(fun0);
thread p1(fun1);
p0.join();
p1.join();
return 0;
}

在这种情况下,两个线程一旦一个加了锁,那么另一个就必定阻塞,这样,就不会出现两边加锁两边阻塞的情况,从而避免死锁。
②同时上锁
同时上锁需要用到lock()函数,如下所述:
mutex m0,m1;
int i = 0;
void fun0()
{
while (i < 100)
{
lock(m0,m1);
lock_guard<mutex> g0(m0, adopt_lock);
lock_guard<mutex> g1(m1, adopt_lock);
cout << "thread 0 running..." << endl;
}
return;
}
void fun1()
{
while (i < 100)
{
lock(m0,m1);
lock_guard<mutex> g0(m0, adopt_lock);
lock_guard<mutex> g1(m1, adopt_lock);
cout << "thread 1 running... "<< i << endl;
}
return;
}
int main()
{
thread p0(fun0);
thread p1(fun1);
p0.join();
p1.join();
return 0;
}
注意到这里的lock_guard中多了第二个参数adopt_lock,这个参数表示在调用lock_guard时,已经加锁了,防止lock_guard在对象生成时构造函数再次lock()。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)