01
前言
大家好,前面发了几篇关于PID的文章:点击图片即可阅读。
教你10分钟完成智能小车的PID调速。

快速调试PID参数的3种方法。
02
自动控制系统
在直流有刷电机的基础驱动中,如果电机负载不变,我们只要设置固定的占空比(电压),电机的速度就会稳定在目标范围。
然而,在实际的应用中,负载可能会发生变化,此时如果还是输出固定的电压,电机的速度就偏离目标范围了,为了解决这个问题,我们需要引入自动控制系统中的闭环控制。接下来我们开始学习自动控制系统的内容。
概念:用自动控制装置,对关键参数进行自动控制,使它在受到外界干扰而偏离正常状态时,能够被自动地调节回到目标范围内。
应用场景:电水壶保温系统 、大棚温控系统、水位控制系统,等等。
分类:自动控制系统分为开环控制系统和闭环控制系统 。
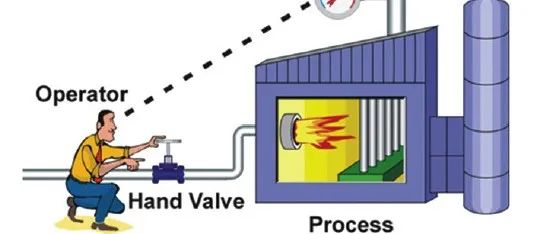
① 开环控制系统
在开环控制系统中,系统输出只受输入的控制,没有反馈回路,控制精度和抑制干扰的特性都比较差。
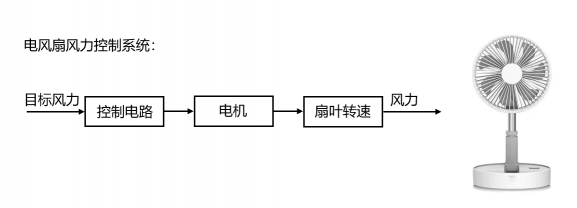
电风扇风力控制系统就是一个开环控制的系统,我们设置好目标风力之后,控制电路就输出相应的电压(假设是电压控制),此时电机的扇叶转速就被控制在目标范围了。
理想状态下,风扇的输出风力确实可以稳定在目标值附近,然而,在实际的使用中,电机会逐渐老化,扇叶上的灰尘也会让负载增大,此时我们所设定目标风力和实际风力可能就存在偏差了。
② 闭环控制系统
在闭环控制系统中,引入了反馈回路,利用输出(实际值)和输入(目标值)的偏差,对系统进行控制,避免偏离预定目标。
大棚温控系统就是一个闭环控制的系统,我们设置好目标温度之后,温度传感器会采集棚内的实际温度,然后将目标温度和实际温度进行偏差的计算,计算后的结果输入到控制电路中,控制电路进一步控制温控设备进行升温和降温,此时棚内的实际温度就被控制在目标范围了。
当实际温度因外部影响偏离目标值时,温度传感器(反馈电路)就能及时的反馈偏差,让系统自动调节温控设备,使得实际温度逐渐回到目标范围。

03
PID 算法
match
PID 算法是闭环控制系统中常用的算法,PID 分别是 Proportion(比例)、Integral(积分)、Differential(微分)的首字母缩写。它是一种结合比例、积分和微分三个环节于一体的闭环控制算法。
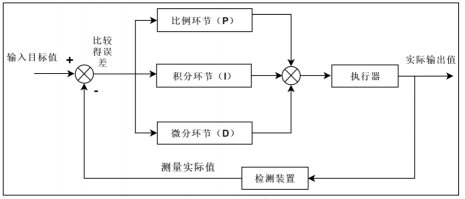
我们将输入目标值和实际输出值进行偏差的计算,然后把计算结果输入到 PID控制算法中,经过比例、积分和微分三个环节的运算,运算后的输出作用于执行器,从而让系统的实际值逐渐靠近目标值。
以大棚温控系统为例,来理解 PID 算法中三个环节的作用。
比例环节( Proportion)
比例环节可以成比例地反应控制系统的偏差信号,即输出与输入偏差成正比,可以用来减小系统的偏差。公式如下:
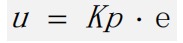
我们可以通过大棚温控去理解PID公式。例如需要调节棚内温度为 30℃,而实际温度为 10℃,此时的偏差 e=20,由比例环节的公式可知
当 e 确定时,Kp 越大则输出u 越大,也就是温控系统的调节力度越大,这样就可以更快地达到目标温度;而当 Kp 确定时,偏差 e 越大则输出 u 越大。
由此可见,在比例环节中,比例系数 Kp 和偏差 e 越大则系统消除偏差的时间越短
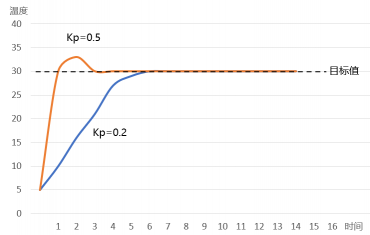
当 Kp 的值越大时,其对应的橙色曲线达到目标值的时间就越短,与此同时,橙色曲线出现了一定幅度的超调和振荡,这会使得系统的稳定性下降。
所以我们在设置比例系数的时候,并不是越大越好,而是要兼顾消除偏差的时间以及整个系统的稳定性。
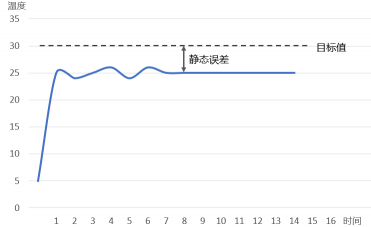
在实际的应用中,如果仅有比例环节的控制,可能会给系统带来一个问题:静态误差。
静态误差是指系统控制过程趋于稳定时,目标值与实测值之间的偏差。
如果我们在需要调节棚内温度为 30℃,而实际温度为 25℃,此时偏差 e=5,Kp 为固定值,那么此时的输出可以让大棚在半个小时之内升温 5℃,而外部的温差可以让大棚在半个小时之内降温 5℃,也就是说,输出 u 的作用刚好被外部影响抵消了,这就使得偏差会一直存在。
我们可以通过增大 Kp 来增大输出,以此消除偏差。在实际应用中,此方法的局限性很大,因为我们不能确定偏差的大小,它是在实时变化的,如果我们把 Kp 设置得太大,就会引入超调和振荡,让整个系统的稳定性变差。因此,为了消除静态误差,我们引入了积分环节。
积分环节(Integral)
积分环节可以对偏差 e 进行积分,只要存在偏差,积分环节就会不断起作用,主要用于消除静态误差,提高系统的无差度。
引入积分环节后,比例+积分环节的公式如下:

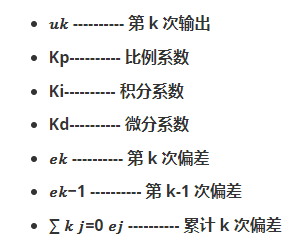
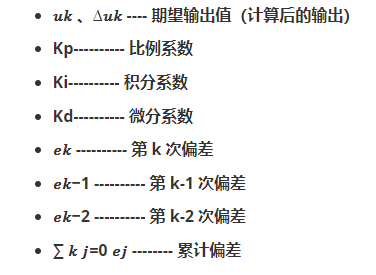
u —输出
e — 偏差
∑e—累计偏差
Kp— 比例系数
Ki—积分系数
通过以大棚温控分析可以知道,如果温控系统的比例环节作用被抵消,存在静态误差 5℃,此时偏差存在,积分环节会一直累计偏差,以此增大输出,从而消除静态误差。
从上述公式中可以得知,当积分系数 Ki 或者累计偏差越大时,输出就越大,系统消除静态误差的时间就越短。
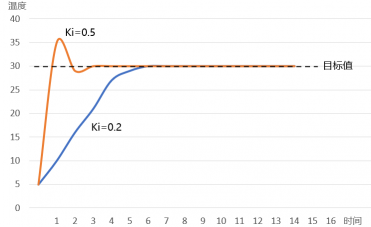
当 Ki 的值越大时,其对应的橙色曲线达到目标值的时间就越短,与此同时,橙色曲线出现了一定幅度的超调和振荡,这会使得系统的稳定性下降
因此,我们在设置积分系数的时候,并不是越大越好,而是要兼顾消除静态误差的时间以及整个系统的稳定性。
只要系统还存在偏差,积分环节就会不断地累计偏差。当系统偏差为 0的时候,说明已经达到目标值,此时的累计偏差不再变化,但是积分环节依旧在发挥作用(此时往往作用最大),这就很容易产生超调的现象了。
因此,我们需要引入微分环节,提前减弱输出,抑制超调的发生。
微分环节(Differential)
微分环节可以反应偏差量的变化趋势,根据偏差的变化量提前作出相应控制,减小超调,克服振荡。引入微分环节后,比例+积分+微分环节的公式如下:


我们继续使用大棚温控去分析微分环节的作用。如果温控系统目标温度为 30℃,在上午八点的时候存在偏差15℃,经过一段时间的调节,到了上午九点,此时偏差已经缩小到5℃,偏差的变化量= 九点的偏差(第 k 次)-八点的偏差(第 k-1 次)= -10,结合上述公式可知,此时微分环节会削弱比例和积分环节的作用,减小输出以抑制超调。
最终得到了一个 PID算法公式:

这个公式是 PID 离散公式之一,除了离散公式之外,PID 还有连续的公式,但是因为连续的公式不利于机器计算,我们一般不研究。每一个系统的 PID 系数并不是通用的,这需要根据实际的情况去设置。
04
PID 算法离散公式
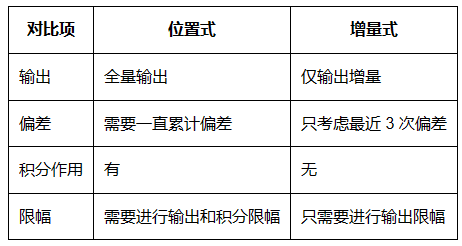
位置式 PID 公式

这个公式的计算需要全部控制量参与,它的每一次输出都和过去的状态有关。
增量式 PID 公式
通过位置式的 PID 公式,可推导出增量式 PID 公式
将 k = k-1 代入位置式 PID 公式

由

增量式 PID 可以看出,增量式 PID 的计算并不需要一直累计偏差,它的输出与近三次的偏差有很大关系。
注意:增量式 PID 公式输出的只是控制量的增量。假设电机实际转速为 50RPM,现在我们要让它加速到 60RPM,如果采用的是位置式 PID,系统将直接输出 60RPM 对应的控制量(占空比);
如果采用的是增量式 PID,系统将输出提速 10RPM对应的控制量(占空比),此时我们还需要加上上次(50RPM)的输出。
两个 PID 公式的不同点
两种 PID 公式的优缺点
① 位置式:
优点:位置式 PID 是一种非递推式算法,带有积分作用,适用于不带积分部件的对象。
缺点:全量计算,计算错误影响很大;需要对偏差进行累加,运算量大。
② 增量式:
优点:只输出增量,计算错误影响小;不需要累计偏差,运算量少,实时性相对较好。
缺点:积分截断效应大,有稳态误差。
05
积分饱和问题
在位置式 PID 中,如果系统长时间无法达到目标值,累计偏差(积分)就会变得很大,此时系统的响应就很慢了。
例如某个电机能达到的最大速度为 300RPM,而我们设置了目标速度为 350RPM,这明显是一个不合理的目
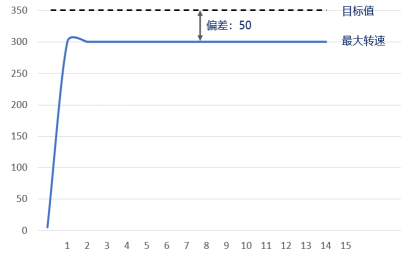
由于系统长时间无法达到目标值,累计偏差(积分)会变得越来越大,逐渐达到深度饱和的状态,此时我们再设置一个合理范围的目标速度(例如 200RPM),系统就没有办法在短时间内响应了。
为了避免位置式 PID 中可能出现的积分饱和问题,可以考虑下面解决方法:
① 优化 PID 曲线,系统越快达到目标值,累计的偏差就越小;
② 限制目标值调节范围,规避可以预见的偏差;
③ 进行积分限幅,在调整好 PID 系数之后,根据实际系统来选择限幅范围。
06
PID算法代码实现
控制量相关的结构体
我们知道PID 的离散化公式后,实现 PID 算法的代码是非常简单。
定义结构体来管理这些控制量
typedef struct
{
__IO float SetPoint; /* 目标值 */
__IO float ActualValue; /* 期望输出值 */
__IO float SumError; /* 偏差累计 */
__IO float Proportion; /* 比例系数 P */
__IO float Integral; /* 积分系数 I */
__IO float Derivative; /* 微分系数 D */
__IO float Error; /* Error[1],第 k 次偏差 */
__IO float LastError; /* Error[-1],第 k-1 次偏差 */
__IO float PrevError; /* Error[-2],第 k-2 次偏差 */
} PID_TypeDef;
PID 算法代码
位置式 PID 代码
/*
* @brief pid 闭环控制
* @param *PID:PID 结构体变量地址
* @param Feedback_value:当前实际值
* @retval 期望输出值
*/
int32_t own_pid_ctrl(PID_TypeDef *PID,float Feedback_value)
{
PID->Error = (float)(PID->SetPoint - Feedback_value); /* 计算偏差 */
PID->SumError += PID->Error; /* 累计偏差 */
PID->ActualValue = (PID->Proportion * PID->Error) /* 比例环节 */
+ (PID->Integral * PID->SumError) /* 积分环节 */
+ (PID->Derivative * (PID->Error - PID->LastError)); /* 微分环节 */
PID->LastError = PID->Error; /* 存储偏差,用于下次计算 */
return ((int32_t)(PID->ActualValue)); /* 返回计算后输出的数值 */
}
own_pid_ctrl 函数用来进行位置式 PID 的控制,该函数的 2 个形参:PID 传入 PID控制量相关的结构体地址;Feedback_value 传入当前系统的实际值,用于计算偏差。
在函数中,我们先计算本次偏差 Error,然后把偏差累计,存入 SumError 成员当中,接着根据位置式的公式进行三个环节的计算,计算后的期望输出存入 ActualValue 成员当中,然后存储本次偏差,最后返回期望输出值。
增量式 PID 代码
/*
* @brief pid 闭环控制
* @param *PID:PID 结构体变量地址
* @param Feedback_value:当前实际值
* @retval 期望输出值
*/
int32_t own_pid_ctrl(PID_TypeDef *PID,float Feedback_value)
{
PID->Error = (float)(PID->SetPoint - Feedback_value); /* 计算偏差 */
PID->ActualValue +=
/* 比例环节 */
(PID->Proportion * (PID->Error - PID->LastError))
/* 积分环节 */
+ (PID->Integral * PID->Error)
/* 微分环节 */
+ (PID->Derivative * (PID->Error - 2 * PID->LastError + PID->PrevError));
PID->PrevError = PID->LastError; /* 存储偏差,用于下次计算 */
PID->LastError = PID->Error;
return ((int32_t)(PID->ActualValue)); /* 返回计算后输出的数值 */
}
增量式 PID 的代码实现和位置式是非常类似的,所以我们在实际的代码实现中,可以通过一个宏定义来切换这两种不同的算法,值得注意的是,增量式 PID 输出的是调节量,所以计算期望输出值 ActualValue 的时候是自增运算,这一点和位置式 PID 是不一样的。
-END-
往期推荐:点击图片即可跳转阅读

深入理解PID的微分、积分电路

平衡小车PID,就该这么调!!!

增量式PID是什么?不知道你就落伍了

PID算法搞不懂?看这篇文章。
啥是PID?PID可以吃吗?
到底什么是串级PID?

PID系统稳定性与零极点的关系

万能算法PID趣味总结
增量式PID是什么?不知道你就落伍了

再聊PID
PID到底是个啥?来给你讲个故事
电子设计竞赛(4)-常用的两种PID算法

电子设计竞赛(三)-SPWM与PID

平衡小车PID,就该这么调!!!

再论PID,PID其实很简单。。。