传感器数据处理2:激光雷达运动畸变的去除
激光雷达运动畸变的去除比里程计标定更重要,但也取决于用的雷达型号。我用的思岚A2雷达频率小于10Hz,畸变也是比较明显的。
概念介绍
-
激光雷达传感器介绍(分类、原理)
-
分类介绍
-
三角测距(A2,EAI,一般10m左右的都是),双目摄像头也是用的三角测距法,左右各一个摄像头
优点:中近距离精度较高、价格便宜
缺点:远距离精度较差、易受干扰、一般在室内使用

-
飞行时间:ToF测距
优点:测距范围广、测距精度高、抗干扰能力强
缺点:价格昂贵、室内室外皆可。
基本思想就是一个激光发射器,在t0时刻发一束光出去,在t1时刻接收到他,那么距离就是C(t1-t0)/2他是由光的飞行时间来决定的。

-
测距原理
-
三角法测距原理
A,B点是激光发射头,α和β是激光发射的两个角,L就是两个发射头之间的距离,根据角边角我们就可以确定一个三角形,然后L边的中点到三角形顶点的距离也是可以算出来的,通过和差化积公式计算L,再换成d。d公式中,α和L都是标定好的,β是通过射出去的α计算出来的。双目摄像头也是这样,但是都是有噪声的。

-
TOF测距原理
测距公式就是:光速*时间差/2:C(t1-t0)/2
光速是30万Km/s,如果我们要测一个1m左右的物体,就是ns级别的。

-
激光雷达数学模型介绍(数学模型)
-
光束模型

把一条激光看做一个激光束,射到墙上时会有一个期望距离,在这个期望值的附近会形成一个高斯分布,这是正常的情况。ztk * 是期望值

如果有障碍物挡住了的话,也就是d>d1时,这样会形成一个指数分布

基本上是上面的两种情况。那激光雷达的光束模型就是我们给定一个机器人的位置xt,和地图m,来获得这一帧观测值zt的概率。我们默认认为每一个激光束都是线性无关的,是独立的。得到一个累计乘。
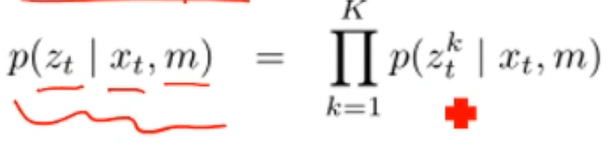
用矩阵形式表示就是

等式左边是这束激光的概率(之后都叫得分),反应的是当前这束激光与地图的重合程度,重合程度越好,得分也就越高,如果正好落在期望值的上面,那么就说这个得分就是1

激光发出的一帧激光数据与地图的重合程度这个东西就是我们的光束模型,光束模型评估的就是这个。
-
运动畸变的介绍(原因与效果)
畸变去除
-
纯估计方法(不借助任何设备,纯靠匹配过程中去除)
- ICP方法介绍(是纯估计方法的变种):简单说就是给定一个点云,求出R和T,然后进行欧式变换就得到了两个点云点的最短距离
- 迭代最近点算法(ICP)是一种点云匹配算法。其思想是:通过旋转、平移使得两个点集之间的距离最小。
他重复进行“确定对应关系的点集→计算最优刚体变换”的过程,直到某个表示正确匹配的收敛准则得到满足。 - 算法流程就是:1、假设待配准的点集为:P={pi→}P={pi→};模板点集为:X={xi→}X={xi→}。
接下来要从带配准的点集PP中提取出与模板点集XX中的每个点最近的匹配点,度量方式采用欧式距离。
-
ICP方法常用在点云中,是点云匹配的一种较为广泛的方法。他的基本目的就是两个点云进行配种。给定两个点云集合,假设他们对应是匹配的,也就是他们的元素对应在物理空间中是同一个点。ICP的目标函数就是如下图,找到一个R和t,进行欧式变换偶得两个匹配点的距离最小。
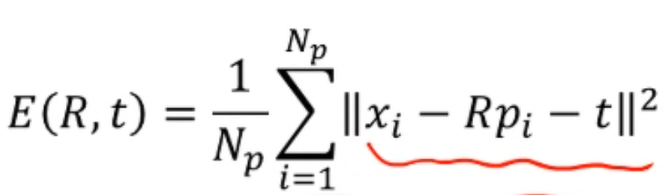
基本目的就是:找到一个欧式变换E(R,t),使得两个点云的距离最小化,这样就将畸变去除了
-
已知对应点的求解方法
通过闭环的方式求出一个解析解,先求出一个点云的基准位姿,再求另一个

然后把每个点云都移到平均位姿来
然后我们构造一个W,然后进行SVD分解

然后就得到ICP的解(求出R和t),t的话比较简单,他就是同一坐标系下两个点的差,R=UVT,然后进行欧式变换就可以得到最短距离

产生的效果如下,蓝色和红色分别是两个点云点在未处理前,处理后如右图,基本完全重合

-
未知对应点的求解方法

在实际中,不知道对应的匹配点,他不能一步到位计算出R和t。说白了就是我们要求一个变量A,要求这个变量之前,我们必须知道这个隐变量B,那么就先固定A求B,再固定B求A,再固定A求B…如此迭代。
算法流程就是首先寻找对应点:找与第一个点云距离最近的点
然后根据找到的对应点,计算R和t
然后对点云进行转换,计算误差
然后就不断迭代,直至误差小于某一个值(这个迭代的过程)

总结ICP算法与推导过程
参考:https://blog.csdn.net/weixin_35695879/article/details/103125575




-
VICP方法介绍
-
里程计辅助方法(辅助方法的其中一种)
-
使用里程计辅助去除
-
VICP的缺点
- 低帧率激光(5Hz),匀速运动假设不成立,不能真实地反应机器人的运动情况
- 数据预处理和状态估计过程耦合
-
解决方法
- 尽可能准确的反应运动情况
- 实现预处理和状态该估计的解耦
-
传感器辅助方法(里程计/IMU)
- 极高的位姿更新频率(200Hz),可以比较准确的反应运动情况。
- 较高精度的局部位姿估计
- 跟状态估计完全解耦
-
惯性测量单元(IMU)与轮式里程计传感器辅助

总结轮式里程计去除运动畸变
-
已知数据:1.已知当前 帧激光的起始时间 𝑡𝑠,𝑡𝑒
2.两个激光束间 的时Δ𝑡
3.里程 计数据按照时间顺序存储在一个队列 中
4.最早的里程计数据时间戳 <𝑡𝑠
5.最早的里程计数据时间戳 >𝑡𝑒。
-
他要做的就是1.求解当前帧激光数据中每一个点对应的机器人位姿,即求解{ 𝑡𝑠,𝑡𝑠+Δ𝑡,⋯,𝑡𝑒}时刻的机器人位姿。2.根据求解的位姿把所有的激光点转换到同一坐标系下。3.重新封装成一帧激光数据,发布出去。
-
过程:
-
1.求解ts,te时刻的位姿ps,pe
-
里程计队列中正好和激光数据同步,假设第 i和第 j跟数据是时刻分别为 𝑡𝑠,𝑡𝑒:
𝑝𝑠=𝑂𝑑𝑜𝑚𝐿𝑖𝑠𝑡[𝑖]
𝑝𝑒=𝑂𝑑𝑜𝑚𝐿𝑖𝑠𝑡[𝑗]
-
在𝑡𝑠时刻没有对应的里程计位姿,则进行线性插值设在 l,k时刻有位姿,且 l<s<k,则:
𝑝𝑙=𝑂𝑑𝑜𝑚𝐿𝑖𝑠𝑡[𝑙]
𝑝𝑘=𝑂𝑑𝑜𝑚𝐿𝑖𝑠𝑡[𝑘]
𝑝𝑠=𝐿inar𝐼𝑛𝑡𝑒𝑟𝑝(𝑝𝑙,𝑝𝑘,𝑠−𝑙𝑘−𝑙)
-
2.进行二次插值
- 在一帧激光数据之间,认为机器人做匀加速运动。
- 机器人的位姿是关于时间 t的二次函数。
- 设𝑡𝑚=(𝑡𝑠+𝑡𝑒)/2,且 l<m<k 则:
𝑝𝑚=𝐿inar𝐼𝑛𝑡𝑒𝑟𝑝(𝑝𝑙,𝑝𝑘,𝑚−𝑙 / 𝑘−𝑙) - 已知 𝑝𝑠,𝑝𝑚,𝑝𝑒,可以插值一条二次曲线:
𝑃𝑡=𝐴𝑡2+𝐵𝑡+𝐶
𝑡𝑠≤𝑡≤𝑡𝑒
-
3.二次曲线的近似
- 用分段线性函数对二次曲进行近似
- 分段数大于 3时,近似误差可以忽略不计
- 在𝑡𝑠和𝑡𝑒时间段内,一共取 k个位姿 𝑝𝑠,𝑝𝑠+1,⋯,𝑝𝑠+𝑘−2,𝑝𝑒
- 位姿通过线性插值获取,在这 K个位姿之间,进行线性插值:
设𝑝𝑠和𝑝𝑠+1之间有 N个位姿 {𝑝𝑠,𝑝𝑠1,⋯,𝑝𝑠(𝑛−2),𝑝𝑠+1}
则:
𝑝𝑠𝑖=𝐿inar𝐼𝑛𝑡𝑒𝑟𝑝(𝑝𝑙,𝑝𝑘,𝑠𝑖−𝑠 / Δ𝑡)
-
4.坐标系统和激光数据的发布
-
一帧激光数据 n个激光点,每对应的位姿 𝑝1,𝑝2,⋯,𝑝𝑛通过上述介绍的方法插 值得到
-
𝑥𝑖为转化之前的坐标, 𝑥𝑖′为转换之后的坐标,则:
𝑥𝑖′=𝑝𝑖𝑇𝑥𝑖
-
把转换之后的坐标为激光数据发布出去:
𝑥𝑖′=(𝑝𝑥,𝑝𝑦)
𝑟𝑎𝑛𝑔𝑒=sqrt(𝑝𝑥∗𝑝𝑥+𝑝𝑦∗𝑝𝑦)
𝑎𝑛𝑔𝑙𝑒=𝑎𝑡𝑎𝑛2(𝑝𝑦,𝑝𝑥)
-
在单片机上处理,直接用单片机接雷达,直接在单片机上消除运动畸变(因为单片机测量的里程计数据和雷达数据是一起上发的,所以他两时间同步,就不会产生运动畸变),无需考虑时间同步的问题
-
在处理器上处理,用USB接单片机和激光雷达,但他两的数据需要进行时间同步才能消除运动畸变。


本节思维导图

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)