ROS为机器人开发者们提供了不同语言的编程接口,其中C++接口叫做roscpp,用来创建topic、service、param,实现ROS的通信功能。
roscpp is a C++ implementation of ROS. It provides a client library that enables C++ programmers to quickly interface with ROS Topics, Services, and Parameters. roscpp is the most widely used ROS client library and is designed to be the high-performance library for ROS.
roscpp 底层采用的通讯协议为TCP/UDP,即无论使用ros的topic还是service,都是通过tcp或udp进行传输。
ros-melodic topic 传输机制
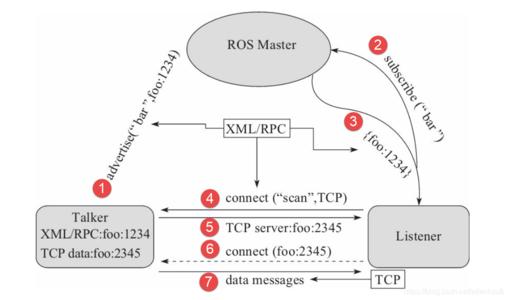
ros topic 的pub sub 过程如下图,talker通过rpc向ros master 注册pub topic,listener通过rpc向ros master 注册sub topic。当ros master 发现listenser注册的sub topic 有人pub时,会把pub此topic的talker信息发送给listener,然后listener和talker通过rpc建立 tcp/udp连接。后续二者通过tcp/udp连接进行通讯,ros master不再参与。
ros 底层通过 transport 实现talker和listener的通信。transport成对建立,为点对点通讯形式。当talker发布的一个topic被多个listener订阅时,ros会为每个listener都建立一个transport用于与其通信,当talker publish一个message时,ros通过遍历所有transport为每个listener发送message。

roscpp_jbus 通信原理
roscpp 是点对点通讯形式,talker 会为每一个listener创建一个transport。而jbus是点对面通讯,所以我们要改变pub的行为,即无论有几个listener,talker只创建一个transport,由jbus通过tipc广播给每一个listener。

Class Transport 是ros抽象底层通信行为的基类。我们通过继承它来实现对roscpp底层通讯协议的更改,通过仿照Class TransportUDP编写Class TransportJBUS。
#ifndef ROSCPP_TRANSPORT_JBUS_H
#define ROSCPP_TRANSPORT_JBUS_H
#include <ros/types.h>
#include <ros/transport/transport.h>
#include <boost/thread/mutex.hpp>
#include "ros/io.h"
#include <ros/common.h>
#include <queue.h>
#include <jbus.h>
#include <vector>
namespace ros {
#define ROSJBUS_ID_FMT_ "ROSJBUS_%d"
#define MAX_RECV_QUEUE_ 32
class TransportJBUS;
typedef boost::shared_ptr<TransportJBUS> TransportJBUSPtr;
class PollSet;
class ROSCPP_DECL TransportJBUS : public Transport {
public:
TransportJBUS(PollSet* poll_set, int max_datagram_size = 0);
~TransportJBUS();
/**
* @brief 用于链接jbus,只在 ConnectionManager::start 调用一次
*
* @return true
* @return false
*/
bool connect_jbus();
virtual void close();
/**
* @brief Create a Incoming object
*
* @param topic_name
* @param user 实质为jbus_handle_t *
* @return true
* @return false
*/
bool createIncoming(const char *topic_name, void *user);
/**
* @brief Create a Outgoing object
*
* @param max_datagram_size 取决于发送端的设置
* @param topic_name
* @return TransportJBUSPtr
*/
TransportJBUSPtr createOutgoing(int max_datagram_size, const char *topic_name);
// overrides from Transport
virtual int32_t read(uint8_t* buffer, uint32_t size);
virtual int32_t write(uint8_t* buffer, uint32_t size);
virtual void enableWrite();
virtual void disableWrite();
virtual void enableRead();
virtual void disableRead();
virtual std::string getTransportInfo();
virtual bool requiresHeader() {
return false;
}
virtual const char* getType() {
return "JBUSROS";
}
int getMaxDatagramSize() const {
return max_datagram_size_;
}
void setJbusHandleIndex(int index) {
jbus_handle_index_ = index;
}
int getJbusHandleIndex() const {
return jbus_handle_index_;
}
const char *getTopicName() {
return (const char *)topic_name_;
}
private:
/**
* @brief 初始化epoll,设置topic name
*
* @param topic_name
* @return true
* @return false
*/
bool initializeSocket(const char *topic_name);
/**
* @brief epoll 处理函数
*
* @param events
*/
void socketUpdate(int events);
/**
* @brief jbus 回调函数,我们通过他接收数据然后触发POLLIN
*
* @param arg jbus收到的数据
* @param user jbus_handle_t *,传他是因为若传this指针,当对象析构后,无法通过this指针判断
* @return enum jbus_cb_status
*/
static enum jbus_cb_status callback_raw(nmpk_msg_t * arg, void *user);
/** data **/
PollSet* poll_set_;
uint32_t max_datagram_size_; // 因为jbus层有切片,所以我们默认其为MSGSIZE_NMPK_MAX (64*1024*1024)
bool closed_;
boost::mutex close_mutex_;
bool expecting_read_; //
bool expecting_write_; //
int notify_pipe[2]; // 实际用于epoll的句柄
char *topic_name_; // 我们用topic name来操作jbus的收发
queue_t *recv_queue_; // 这个队列用于暂存接收数据
bytes_t *recv_buffer_; // 数据读取,第一次先读头,第二次才真正的读数据,所以需要一个缓存
int reorder_bytes_; // recv_buffer_已读数据长度
int jbus_handle_index_; // 当用于sub时,记住其in_transport_vec_的索引号
};
/**
* @brief in 类型的对象管理结构体
*
*/
struct jbus_handle_t {
jbus_handle_t():handle_(nullptr), is_alive_(false) {};
TransportJBUS *handle_; // 对象的this指针
boost::mutex handle_mutex_;
bool is_alive_; // 记录对象是否存活,构造:is_alive_ = true 析构:is_alive_ = false
};
}
#endif
具体实现细节及使用方式见README
# ROSCPP with libjbus
## 依赖
* libcjson
* support_libs
* libjbus
* ros [and it`s dependencies]
## 编译安装
* mkdir build
* cd build
* cmake ..
* make
* sudo cp devel/lib/libroscpp.so /opt/ros/melodic/lib/libroscpp.so
*or catkin_make ??*
## 说明
在 topic 中强制使用 jbus 代替 ros 原本使用的 TCP/UDP 底层通讯协议,使用时只需将编译出来的 libroscpp.so 代替 ros 中原本的libroscpp.so 即可,无需更改任何代码。
### transport_jbus
class TransportJBUS 由基类 Transport 派生,仿照 TransportUDP 编写,用于实现 topic 通讯。
由于原本的ros通讯机制为点对点,而jbus则为点对面,故我们在 pub topic 时,不再为每个 sub 链接都创建一个 transport,而是只创建一个 pub 用的 TransportJBUS 对象,并由 JbusTransportManager 中的 out_transport_map_ 进行管理。
在 sub topic 时,会创建一个 TransportJBUS,并创建一个 jbus_handle_t 对象对其进行管理。因为在 jbus 接收数据时,是通过void *指针将对象传入 jbus 的回调函数中,若我们直接将 TransportJBUS 对象的 this 指针传入,会导致对象析构后无法通过 this 指针判断,从而发生不可预料的问题。而 jbus_handle_t 通过标记 TransportJBUS 对象的状态,避免了这类问题。jbus_handle_t 由JbusTransportManager 中的 in_transport_vec_ 进行管理,并在程序退出时统一释放。
### jbus_transport_manager
class JbusTransportManager 用于管理 TransportUDP 对象。JbusTransportManager 是一个单例对象,在程序启动时会打印JBUSROS: start!
Hello world
表示现在使用的是 roscpp_jbus
### 其他修改
在其他源文件中的修改都由注释
```
/*** jbusros ***/
xxxxx;
/***************/
```
进行包裹,可通过搜索此注释快速定位各处修改
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)