假设你在推箱子,你推的力气是
f
f
f,箱子位移是
x
x
x,质量是
1
1
1,没有摩擦力,那么根据简单物理知识:
f
=
m
a
=
x
¨
f=ma=\ddot{x}
f=ma=x¨ 需要格外注意的一点,不管是f还是x都是关于时间t的函数,这个式子其实长这样,这就是系统的模型:
f
(
t
)
=
m
a
=
x
¨
(
t
)
f(t)=ma=\ddot{x}(t)
f(t)=ma=x¨(t) 假设
f
(
t
)
=
1
f(t)=1
f(t)=1,解为
x
(
t
)
=
1
2
t
2
x(t)=\frac{1}{2}t^2
x(t)=21t2,得到了非常重要的输出关于时间的函数。
我们思考一个问题,因为F不会每次都是一样的,我们推动的力气可能是任何关于时间的函数,难道我们要每次都带入F去求解一个复杂的微分方程吗,有没有一个更好的办法?答案是拉普拉斯变换。 拉普拉斯变换很多,记住几个关键的,剩下查表就行了。但是拉普拉斯变换的微分性质是一定要会的重中之重。记住下面两个就够了,高阶形式也是一样的,不过题目一般不会有。真的到高阶了也肯定是软件求解了。
L
[
d
f
(
t
)
d
t
]
=
s
F
(
s
)
−
f
(
0
)
L\left[\frac{d f(t)}{d t}\right]=s F(s)-f(0)
L[dtdf(t)]=sF(s)−f(0),
L
[
d
2
f
(
t
)
d
t
]
=
s
2
F
(
s
)
−
s
f
(
0
)
−
f
′
(
0
)
L\left[\frac{d^{2} f(t)}{d t}\right]=s^{2} F(s)-s f(0)-f^{\prime}(0)
L[dtd2f(t)]=s2F(s)−sf(0)−f′(0)
我们用拉普拉斯变换求解一下看看吧(统一小写代表时域,大写代表s域),我们假设初始值都是0:
F
(
t
)
=
s
2
X
(
s
)
−
s
x
(
0
)
−
x
˙
(
0
)
=
s
2
X
(
s
)
F(t)=s^2X(s)-sx(0)-\dot{x}(0)=s^2X(s)
F(t)=s2X(s)−sx(0)−x˙(0)=s2X(s)
G
(
s
)
=
X
(
s
)
F
(
s
)
=
1
s
2
G(s)=\frac{X(s)}{F(s)}=\frac{1}{s^2}
G(s)=F(s)X(s)=s21
现在你知道了s域中输出和输入的比值,当你的输出
f
(
t
)
f(t)
f(t)换了后,你只需要求拉普拉斯变换后的
F
(
s
)
F(s)
F(s)带入即可求出
X
(
s
)
X(s)
X(s),然后拉式反变换即可得到结果。无论你的
f
(
t
)
f(t)
f(t)如何改变,都不会对
G
(
s
)
G(s)
G(s)产生影响,这是这个系统中永远不变的式子,即表示了这个系统的内部性质。
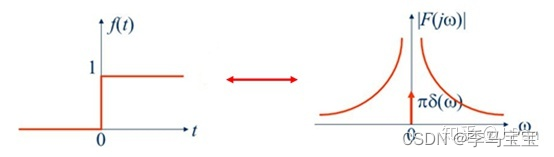
我们试试看
f
(
t
)
=
1
f(t)=1
f(t)=1,则
F
(
s
)
=
1
s
F(s)=\frac{1}{s}
F(s)=s1,则
X
(
s
)
=
G
(
s
)
F
(
s
)
=
1
s
3
X(s)=G(s)F(s)=\frac{1}{s^3}
X(s)=G(s)F(s)=s31,求拉式反变换
x
(
t
)
=
1
2
t
2
x(t)=\frac{1}{2}t^2
x(t)=21t2
对于控制系统来说,我们的任务通产是让输出稳定在某个值,比如我们推物体是希望它正好停在某个地方,但是现在
f
(
t
)
f(t)
f(t)显然是发散的,也就是说系统是不稳定的,关于稳定我们后面再细说。
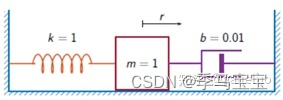
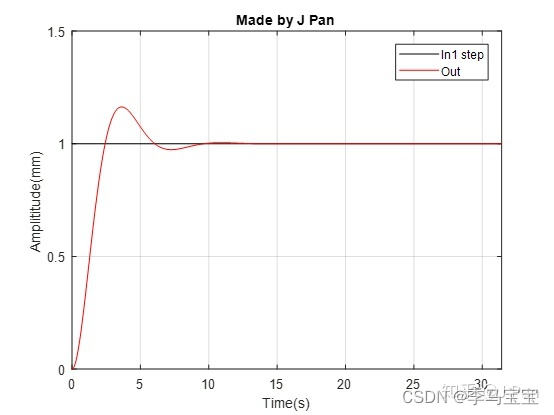
我们换一个复杂一点的系统: 系统方程:
m
⋅
d
2
r
d
t
2
+
b
⋅
d
r
d
t
+
k
⋅
r
=
k
F
(
t
)
m \cdot \frac{d^{2} r}{d t^{2}}+b \cdot \frac{d r}{d t}+k \cdot r=k F(t)
m⋅dt2d2r+b⋅dtdr+k⋅r=kF(t) 转移函数:
Y
(
s
)
=
R
(
s
)
F
(
s
)
=
k
m
s
2
+
b
s
+
k
=
ω
n
2
s
2
+
2
ξ
ω
n
s
+
ω
n
2
Y(s)=\frac{R(s)}{F(s)}=\frac{k}{m s^{2}+b s+k}=\frac{\omega_{n}^{2}}{s^{2}+2 \xi_{\omega_{n}} s+\omega_{n}^{2}}
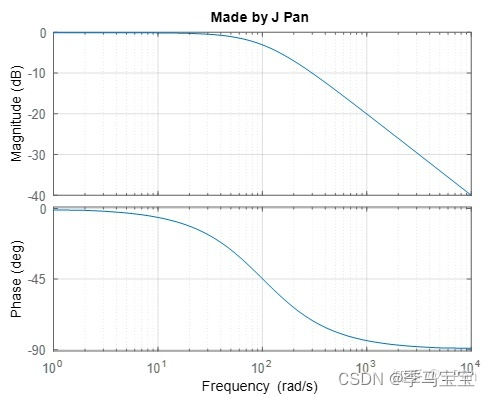
Y(s)=F(s)R(s)=ms2+bs+kk=s2+2ξωns+ωn2ωn2 其中
ω
n
=
k
m
,
ξ
=
b
2
k
m
\omega_{n}=\sqrt{\frac{k}{m}},\xi=\frac{b}{2\sqrt{km}}
ωn=mk,ξ=2kmb 带入
s
=
j
ω
s=j\omega
s=jω,则:(这里非常关键,换完的拉普拉斯变换其实就是傅里叶变换,也就是根据频率展开了)
∣
Y
(
j
ω
)
∣
=
1
(
1
−
(
ω
ω
n
)
2
)
2
+
4
ξ
2
(
ω
ω
n
)
2
,
∠
Y
(
j
ω
)
=
−
artan
2
ξ
ω
ω
n
1
−
(
ω
ω
n
)
2
|Y(j \omega)|=\frac{1}{\sqrt{\left(1-\left(\frac{\omega}{\omega_{n}}\right)^{2}\right)^{2}+4 \xi^{2}\left(\frac{\omega}{\omega_{n}}\right)^{2}}},\angle Y(j \omega)=-\operatorname{artan} \frac{2 \xi \frac{\omega}{\omega_{n}}}{1-\left(\frac{\omega}{\omega_{n}}\right)^{2}}
∣Y(jω)∣=(1−(ωnω)2)2+4ξ2(ωnω)21,∠Y(jω)=−artan1−(ωnω)22ξωnω
零极点:
G
(
s
)
=
(
s
−
b
1
)
(
s
−
b
2
)
2
(
s
−
a
1
)
(
s
−
a
2
)
2
G(s)=\frac{(s-b_1)(s-b_2)^2}{(s-a_1)(s-a_2)^2}
G(s)=(s−a1)(s−a2)2(s−b1)(s−b2)2
s
=
b
1
s=b_1
s=b1是一阶零点,
s
=
b
2
s=b_2
s=b2是二阶零点,
s
=
a
1
s=a_1
s=a1是一阶极点,
s
=
a
2
s=a_2
s=a2是二阶极点 如果存在
a
i
=
b
j
a_i=b_j
ai=bj,则存在零极点对消
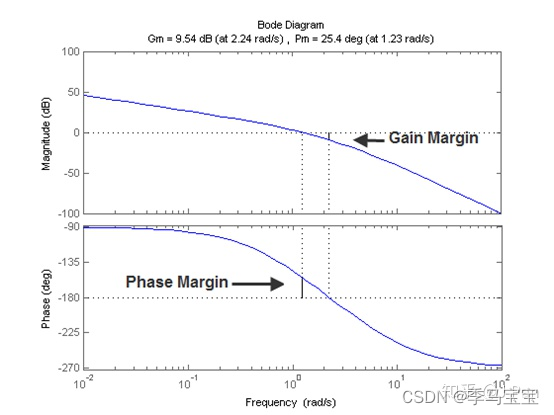
一般来说,传递函数的极点全在左半平面就是稳定的,有一个在右半平面就是不稳定的。有极点在原点则是会有稳态分量(不稳定),在原点以外的纵轴会有正弦信号(临界稳定)。很好理解,下面是拉普拉斯变换平移性质:
L
[
f
(
t
)
e
−
a
t
]
=
F
(
s
+
a
)
L\left[f(t) e^{-a t}\right]=F(s+a)
L[f(t)e−at]=F(s+a) 一旦a<0,就会出现右半面极点,也就会出现不稳定的
e
∣
a
∣
t
e^{|a|t}
e∣a∣t分量。
另外,关于化简有两点。 一是删除过小的零极点,这个很容易想到,比如你输出关于时间的函数是
x
(
t
)
=
e
−
x
+
e
−
10
x
+
e
−
100
x
x(t)=e^{-x}+e^{-10x}+e^{-100x}
x(t)=e−x+e−10x+e−100x,显然你的x和第一项关系最大,后面两项基本可以忽略。一般来说差了一个数量级就可以忽略小的。 二是当零极点靠的足够近的时候,可以对消。

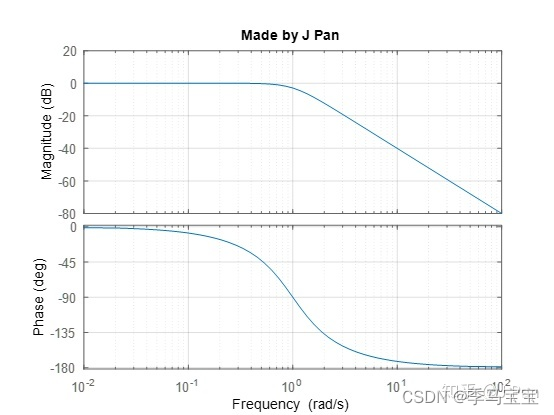
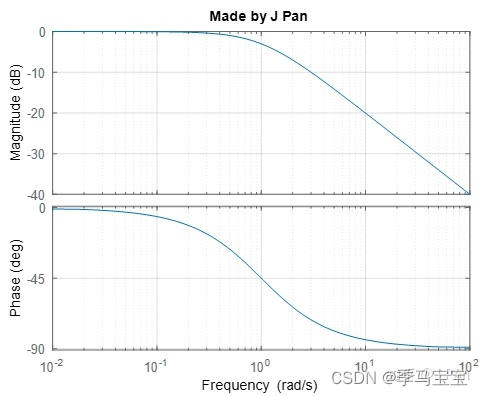
![可见,当输入大于 [公式] 时,系统幅值响应急剧衰减,那我们假如输入是 [公式] ,幅值衰减到 [公式] ,也就是输入的10%,输出很小!假如我们想输入维持在 [公式] ,输出又不怎么衰减,怎么办呢?——负反馈系统!](https://img-blog.csdnimg.cn/8a591e8408b24fa480a80e8f8e08c965.png)