PVI-DSO:《PVI-DSO: Leveraging Planar Regularities for Direct Sparse Visual-Inertial Odometry》翻译
利用平面正则性进行直接稀疏视觉惯性里程计
原文链接:https://arxiv.org/pdf/2204.02635v1.pdf
该系统如何从3D点云中检测共面信息,并使用共面参数引入共面约束?
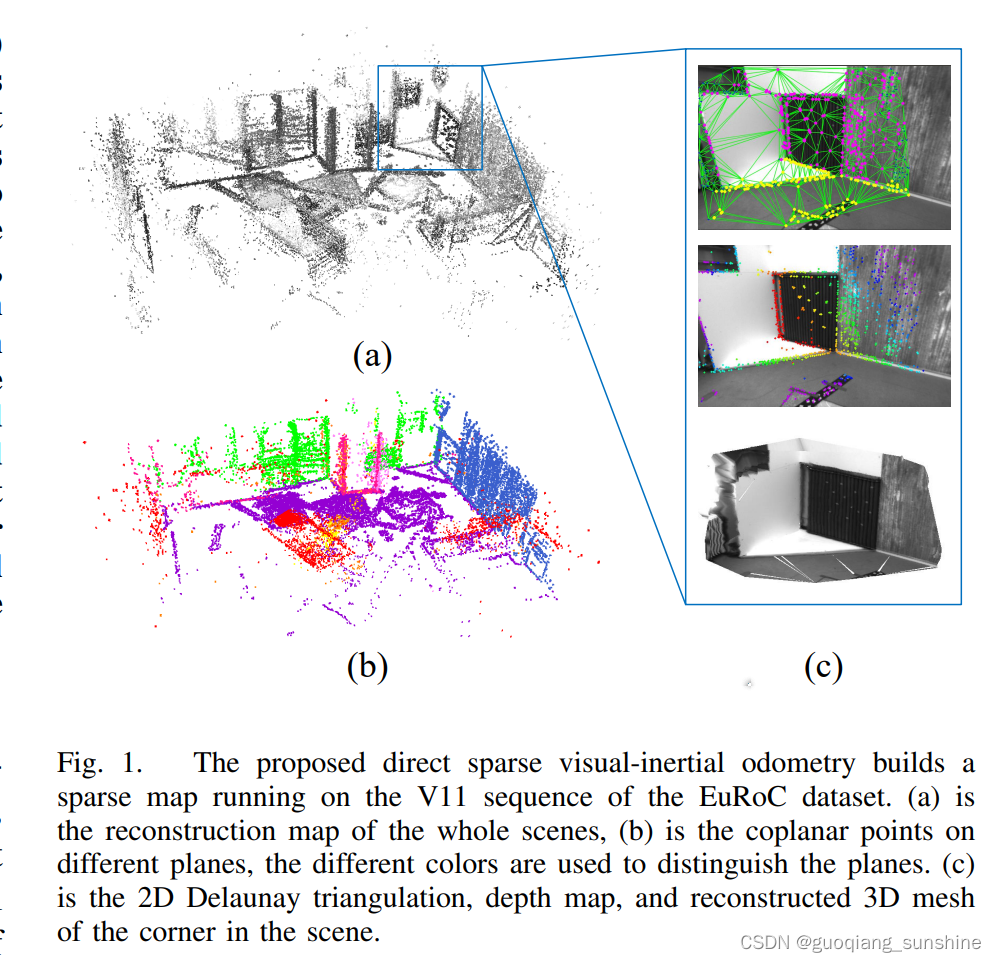
该系统使用2D Delaunay三角剖分在图像中构建三角形规律,并将其投影到3D地标上,从而检测到3D点云中的平面信息。然后,使用共面参数构建光度误差,并将其融合到非线性优化框架中,以估计机体状态和3D地标。在优化过程中,这些共面约束被转换为平面距离成本作为先验信息。这样做的好处是减少计算并提高紧致性。最后,使用动态初始化来保证系统在复杂环境下的鲁棒性。
所提PVI-DSO系统如何利用平面规律来改善VIO系统的精度?
PVI-DSO系统使用从生成的3D网格中提取的共面规律,并使用新颖的共面点参数化将其结合,构建光度误差约束。平面距离成本直接用作平面参数的先验信息,以减少计算量并提高紧凑性。这些方法在不增加太多计算负担的情况下引入了平面信息,并且可以显著减少优化状态变量的数量。实验结果表明,利用平面信息可以提高基于直接法的VIO系统的精度。
PVI-DSO系统在EuRoC和TUMVI数据集上的实验结果如何?
PVI-DSO系统在EuRoC和TUM VI数据集上进行了实验。在EuRoC数据集中,与VI-DSO、mesh-VIO和PVIO相比,PVI-DSO在大多数序列中具有最小的平移误差。实验结果表明,利用平面信息可以显著提高基于直接法的VIO系统的精度。同时,该系统还进行了运行时间评估,结果表明,引入平面信息不会增加太多计算负担,同时可以显著降低优化的状态变量数量。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)